【自动驾驶】自动驾驶概述 ⑤ ( 自动驾驶硬件概述 | 车载计算单元 IPC | 车辆线控系统 )
文章目录
- 一、车载计算单元 IPC
- 1、车载计算单元 IPC 简介
- 2、高性能计算
- 3、高安全冗余
- 4、高环境适应性
- 二、车辆线控系统
- 1、自动驾驶线控系统
- 2、线控转向 ( Steer-by-Wire )
- 3、线控制动 ( Brake-by-Wire )
- 4、线控驱动 ( Throttle-by-Wire )
- 5、线控换挡 ( Shift-by-Wire )
- 6、线控悬挂 ( Suspension-by-Wire )
- 7、线控系统举例说明
一、车载计算单元 IPC
1、车载计算单元 IPC 简介
车载计算单元 ( IPC , In-Vehicle Processing Controller ) 是 实现车辆 自动驾驶 功能的 " 大脑 " ,
承担着 感知数据处理 、 决策规划 、 控制指令生成 等关键任务 ,
是连接 车载传感器 、 执行器 与 智能驾驶 / 座舱系统 的核心枢纽 ,
IPC 的 性能 与 可靠性 直接决定了智能汽车的 功能实现能力、响应速度 与 安全等级 ;
车载计算单元 IPC 需要满足 高性能计算 、 高安全冗余 、 高环境适应性 要求 ;
2、高性能计算
高性能计算 : 车载计算单元 IPC 是 数据 融合 与 处理中心 ;
- 接受数据 : 接收 来自 激光雷达 、 毫米波雷达 、 摄像头 、 超声波雷达 、 定位模块 、 惯导模块 等 多源感知设备的数据 ;
- 处理数据 : 通过算法进行 降噪 、 同步 、 融合 , 将 碎片化 的 原始数据 转化为 结构化 的 环境信息 ;
- 决策控制 : 结合 处理后的 结构化环境信息 , 结合 高精度地图 , 车辆自身状态 ( 速度、姿态、电量 ) , 运行 自动驾驶算法 得到 路径规划 、 避障 、 巡航 等决策 , 生成具体的 横向控制 ( 转向 ) 与 纵向控制 ( 加速、减速、刹车 ) 的 具体指令 ;
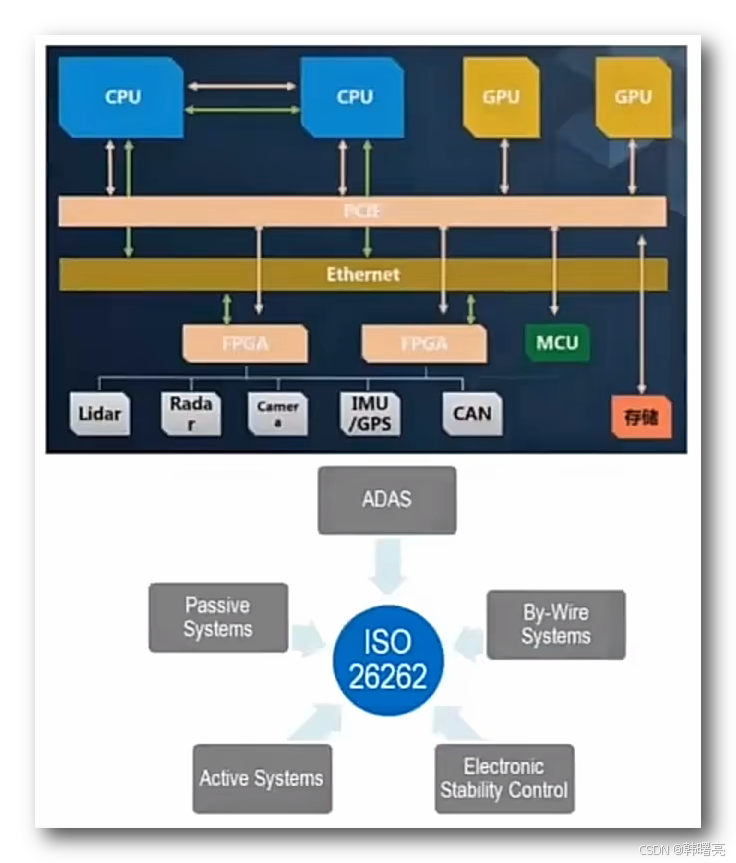
3、高安全冗余
高安全冗余 : 防止 单点故障 导致整个系统宕机 , 如 : 单个传感器故障不能导致整个自动驾驶系统宕机 ;
- 认证等级 : 车载计算单元 IPC 需 通过 ISO 26262 功能安全认证 , 等级通常要求 ASIL B/D , 如 : L3 及以上智能驾驶需 ASIL D 级别的认证 ;
- 硬件冗余 : 避免 单个硬件故障 导致安全事故 , 如 : 双芯片 、 双电源 ;
- 软件容错 : 避免 单个软件故障 导致事故 , 如 : 数据校验 、 故障降级 ;
4、高环境适应性
高环境适应性 :
- 汽车运行环境 : 汽车运行环境复杂 , 温度范围在 -40℃ ~ 105℃ 、 运行过程中 持续振动 、 并且伴有 强电磁干扰 ;
- 行业标准 : ISO-26262 标准 规定了 车规、电磁干扰、震动 相关的技术指标 , 故障率 10FIT ( 10 亿小时只能出现一次故障 ) ;
- 温度循环测试 : 测试 在 -40℃ ~ 105℃ 温度范围内 稳定工作 ;
- 振动冲击测试 : 承受 车辆行驶 中的 持续振动 , 如 : 10 - 2000Hz 的 震动 与 突发冲击 ;
- EMC 电磁兼容测试 : 避免自身电磁辐射干扰其他车载设备 , 同时 抵抗外部干扰 , 如 : 雷达 、 无线通信 ;
二、车辆线控系统
1、自动驾驶线控系统
自动驾驶 线控系统 :
汽车的 自动驾驶 是由 一系列简单指令 完成的 , 如 : 横向控制 的 转向指令 , 纵向控制 的 加减速 、 刹车 指令 ,
这些 简单指令 需要 车辆线控系统 来完成 ,
传统的 燃油汽车 由 液压系统 和 真空助力泵 协助完成 上述 控制指令 ,
在 自动驾驶 汽车 中 的 线控系统 需要 使用 电控化零部件 完成 ,
燃油车 实现 线控系统 , 需要 使用 电子液压系统 等 电控化零部件 实现 ,
新能源车 自带线控系统 , 无需额外 线控零部件 ;
自动驾驶线控系 包含 :
- 线控转向 ( Steer-by-Wire )
- 线控制动 ( Brake-by-Wire )
- 线控驱动 ( Throttle-by-Wire )
- 线控换挡 ( Shift-by-Wire )
- 线控悬挂 ( Suspension-by-Wire )
五大子系统 ;
2、线控转向 ( Steer-by-Wire )
线控转向 ( Steer-by-Wire ) : 取消了 方向盘 与 转向轮 之间的 机械连接 ( 转向柱 ) , 通过 电子信号 直接 控制 转向执行电机 , 实现 方向盘 与 转向轮 之间的电子控制 ;
核心功能 :
- 转向指令 : 接收 自动驾驶 域控制器 的 转向角度 / 转向角速度 指令 , 驱动 电动转向机 精准调整车轮角度 , 如 : 车道保持时 , 需要实时修正 ±0.5° 角度 以避免车辆偏移 ;
- 动态转向比调节 : 线控转向 传动比 可改变 ;
- 低速自动泊车场景 : 用 小转向比 , 方向盘转 1 圈即可实现车轮大角度转向 ;
- 高速巡航场景 : 用 大转向比 , 保证行驶稳定性 ;
技术优势 : 取消 转向柱 , 为内饰设计释放巨大空间 , 提升碰撞安全性 ( 转向柱 方向盘 会挤压 驾驶员 ) , 电脑 通过线控 可以 直接控制车轮转向 , 无需复杂的 机械接管机构 ;
应用场景 :
- L2 级 自动驾驶 : 车道居中辅助(LCC)、交通拥堵辅助(TJA);
- L3 级 自动驾驶 : 高速领航辅助(NOA)中的自动变道;
- L4 级 自动驾驶 : 自动泊车(AVP)、城区自动驾驶的复杂路口转向。
3、线控制动 ( Brake-by-Wire )
线控制动 ( Brake-by-Wire ) : 实现 刹车踏板 与 制动器 之间的电子控制 , 主要分为 电子液压制动 ( EHB ) 和 电子机械制动 ( EMB ) 两种技术路线 ;
技术路径 :
- 电子液压制动 ( EHB ) : 在 传统液压制动 基础上 增加 电子控制单元 , 保留 液压管路 作为备份 ;
- 电子机械制动 ( EMB ) : 完全采用 电子执行器 , 通过电机直接控制制动卡钳 ;
线控制动系统 的 技术优势 : 该系统 的 核心优势 在于 响应速度块 和 能量回收 ;
- 响应时间 : 刹车 响应时间 可 缩短至 120 毫秒 , 远快于 传统液压制动 的 300 ~ 500 毫秒 ;
- 能量回收 : 线控制动系统 可 与 电动汽车的 能量回收系统 协同工作 , 制动时 回收动能 , 提高热效率 ;
4、线控驱动 ( Throttle-by-Wire )
线控驱动 ( Throttle-by-Wire ) : 又称为 " 线控油门 " , 控制发动机 节气门 或 电机功率 的输出 , 是 自动驾驶 纵向动力 控制 的基础 , 其核心是 使用 电子信号 控制 节气门 或 电机输出 , 实现动力的 平稳 、 精准 调节 ;
功能原理 : 接收 自动驾驶 域控制器 的 加速 / 减速 指令 , 精准控制 燃油车 发动机节气门开度 或 新能源车 电机输出功率 , 可以避免 传统机械油门 的 动力波动 ;
自适应动力调节 : 根据 路况 和 车辆负载 调整动力输出 , 保证行驶平顺性 ; 如 : 上坡时 增加动力 , 下坡时 减少动力 , 满载时 增加动力 , 空载时 减少动力 ;
应用场景 :
- 车辆标配 : 线控驱动系统已成为 传统燃油车 、 混合动力 和 电动汽车 的标配 , 支持 动力响应机制 从 机械传递 向数字电控的彻底转型 ;
- 巡航场景 : 在 ACC 或 NOA 模式下 , 维持 恒定车速 , 同时 与 线控制动 协同 响应 前方车辆 减速指令 ;
- 自动泊车 : 控制小功率输出 , 低速精准挪车 , 避免车速过快 ;
5、线控换挡 ( Shift-by-Wire )
线控换挡 ( Shift-by-Wire ) : 采用 电子选档器 与 电子执行器 , 实现 自动变速 、 安全保护 和 驾驶习惯学习 等功能 ;
技术优势 : 简化了 车辆版本制造 , 如 右驾版 和 左驾版 无需改变机械结构 , 只需软件调整即可 , 降低了生产成本 ;
6、线控悬挂 ( Suspension-by-Wire )
线控悬挂 ( Suspension-by-Wire ) : 通过 传感器 实时监测 车身高度 、 加速度 等参数 , 由控制器调整 减振器阻尼 和 弹簧刚度 , 提升 行驶平稳性 和 操控稳定性 ;
- 平坦路面 : 当车辆在 平坦路面 行驶时 , 系统可 减小悬挂行程 , 增强行驶平稳性 ;
- 崎岖路面 : 在 崎岖路面 则 增大 弹性介质 , 承受的瞬时压力 , 提高缓冲能力 ;
悬架系统分类 : 根据 刚度 和 阻尼 的 可调性 , 可分为 被动悬架 和 主动悬架系统 ;
- 被动悬架 : 就是 传统汽车的悬架 , 采用 固定刚度弹簧 和 恒定阻尼减震器 , 无法调节 悬架 的 刚度 和 阻尼 ;
- 主动悬架 : 又细分为 半主动悬架 和 全主动悬架 ;
- 半主动悬架系统 : 主要以电控减震器为基础,能够根据路况调整阻尼特性 ;
- 全主动悬架系统 : 使用 液压泵 或 空气弹簧 取代传统线圈弹簧 , 实现 刚度 和 阻尼 的全面调节 ;
主动悬架 示例 : 比亚迪 的 云辇 系列 悬架 ;
- 云辇-C : 智能阻尼车身控制系统 , 根据路况自动调节 电磁阻尼 , 颠簸路面 采用 高频小阻尼过滤震动 , 急弯 采用低频大阻尼 抑制侧倾 ;
- 云辇-P : 智能液压车身控制系统 , 越野场景使用 , 超高液压举升 , 四轮联动保持平衡 , 露营调平 ;
7、线控系统举例说明
林肯 MKZ 自带 完善的 电气化设备 接口 , 该车 被广泛应用于 自动驾驶研发 ;
林肯 MKZ 线控系统的 车速范围为 30km/h ~ 180km/h , 线控操作范围 可达到 原车 档位 、 动力 、 制动 、 转向角度 的 100% 性能 ;
- 线控油门 : 主要接口有 油门开度 、 控制使能 , 油门开度 范围 0 ~ 100% , 响应时间为 0.3s , 加速度范围 0g ~ 0.4g , 具有操作油门踏板 自动退出 、 反馈开度 等特性 ;
- 线控制动 : 主要接口包括 刹车开度 、 控制使能 , 刹车开度范围 0 ~ 100% , 响应时间为 0.2s , 减速度范围为 -0.9g ~ 0g , 可自动点亮刹车灯 , 操作刹车踏板 自动退出 、 反馈开度 ;
- 线控转向 : 主要接口有 方向盘角度 、 控制使能 , 转向盘角度范围为 -470º ~ 470º , 响应速度为 500º/s , 支持转向灯控制 , 操作方向盘 自动退出 或 转向接管力矩 < 5Nm , 并反馈 转角和扭矩 ;
- 档位控制 : 主要接口为 档位、控制使能 , 档位范围包括 P、R、N、D、L , 响应时间小于 1s , 具有操作档位 自动退出 、 反馈档位状态 的特点 ;
控制使能 : 设置 对应的线控接口 为 使能状态 ( 允许线控控制 ) / 禁用状态 ( 禁止线控控制 ) ;
反馈开度 、 转角 、 扭矩 、 档位状态 : 设置了对应的 开度 、转角 、档位 后 , 将当前的 油门开度 、刹车开度 、方向盘转角 、方向盘扭矩 、当前档位状态 通过接口返回 , 可以理解为 函数返回值 ;