【硬件-笔试面试题-103】硬件/电子工程师,笔试面试题(知识点:项目当中无人机的控制是怎么实现的)
题目汇总版--链接:
【硬件-笔试面试题】硬件/电子工程师,笔试面试题汇总版,持续更新学习,加油!!!-CSDN博客
【硬件-笔试面试题-103】硬件/电子工程师,笔试面试题(知识点:项目当中无人机的控制是怎么实现的)
1、题目
项目当中无人机的控制是怎么实现的
2、知识点
PX4 飞控是一款开源的无人机飞控系统,其控制逻辑基于多环嵌套控制架构,通过传感器感知、数据融合、控制算法解算和执行器驱动,实现无人机的稳定飞行与任务执行。以下是其控制流程和核心机制的详细说明:
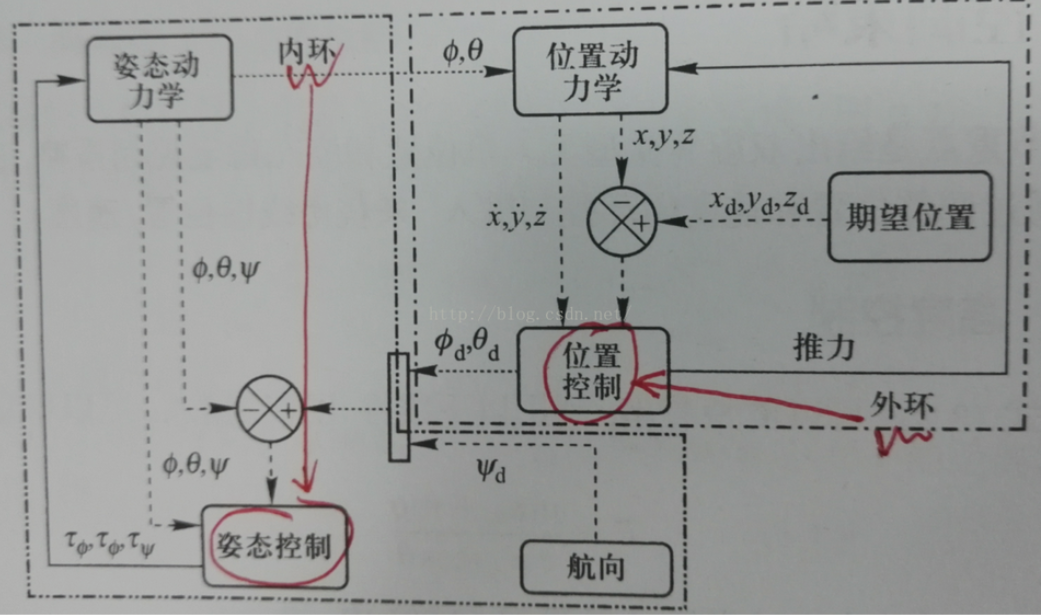
一、核心控制架构:分层嵌套控制
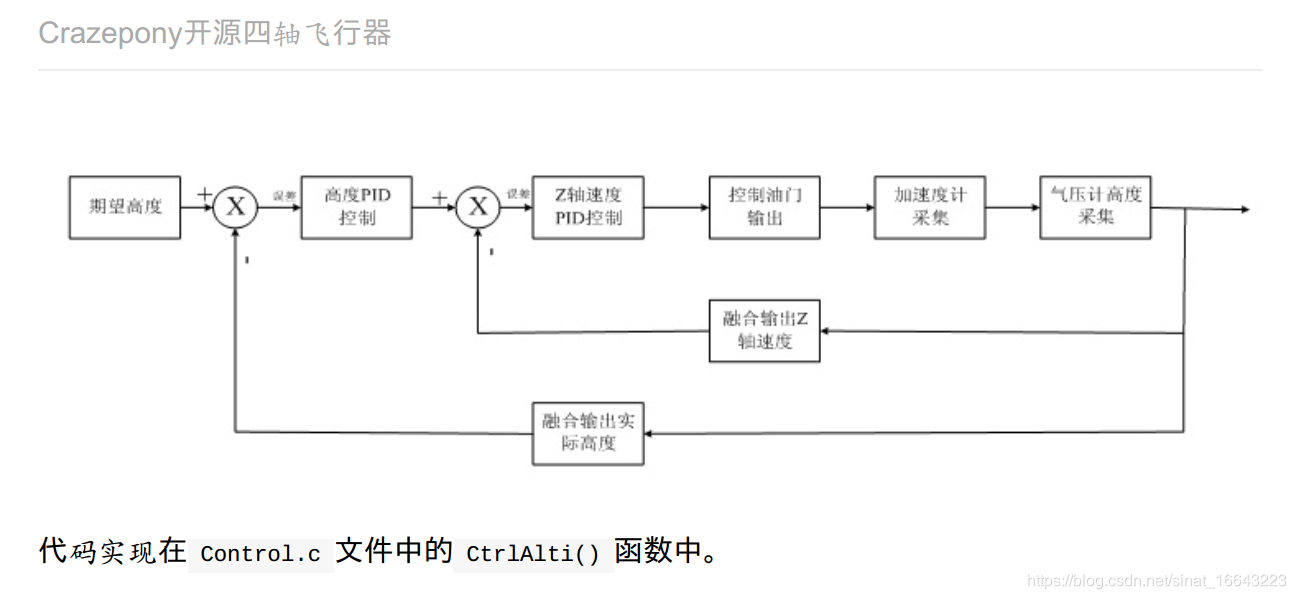
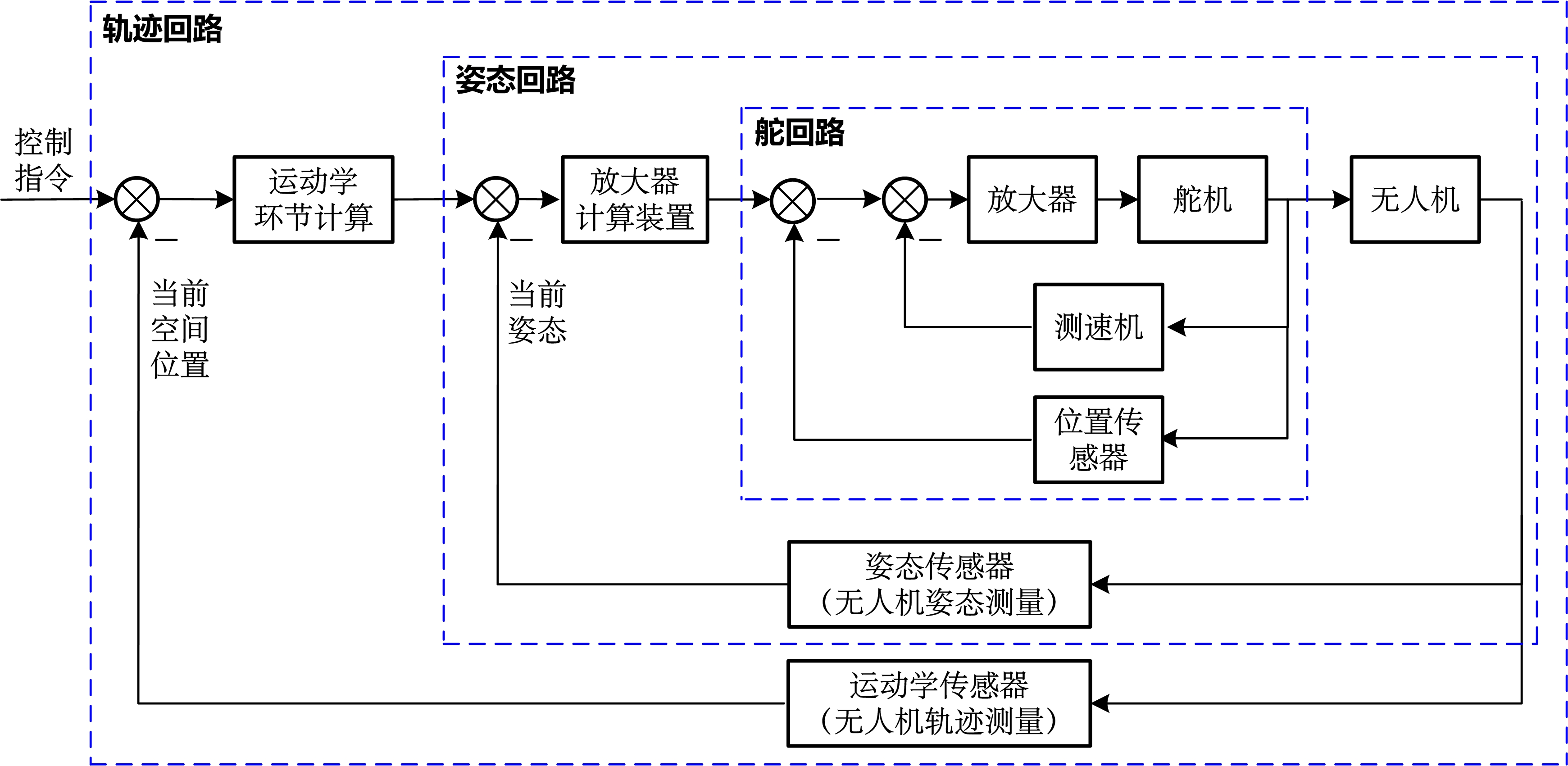
PX4 采用 **“位置环→速度环→姿态环→角速度环→电机输出”** 的多层级嵌套控制结构,从外环到内环响应速度逐渐加快,形成闭环反馈机制:
-
最外环:位置环
- 目标:控制无人机在三维空间(x/y/z 轴)的位置,跟踪期望坐标(如 GPS 航点、遥控器指令)。
- 输入:期望位置(来自任务规划器或遥控器)、实际位置(融合 GPS、视觉 SLAM、气压计等数据)。
- 输出:计算位置偏差后,生成对应的期望速度指令,传递给速度环。
-
次外环:速度环
- 目标:控制无人机的飞行速度,跟踪位置环输出的速度指令。
- 输入:期望速度、实际速度(通过位置微分或光流、GPS 测速获得)。
- 输出:根据速度偏差,生成期望的姿态角(横滚角、俯仰角)和垂直方向的推力指令,传递给姿态环。
-
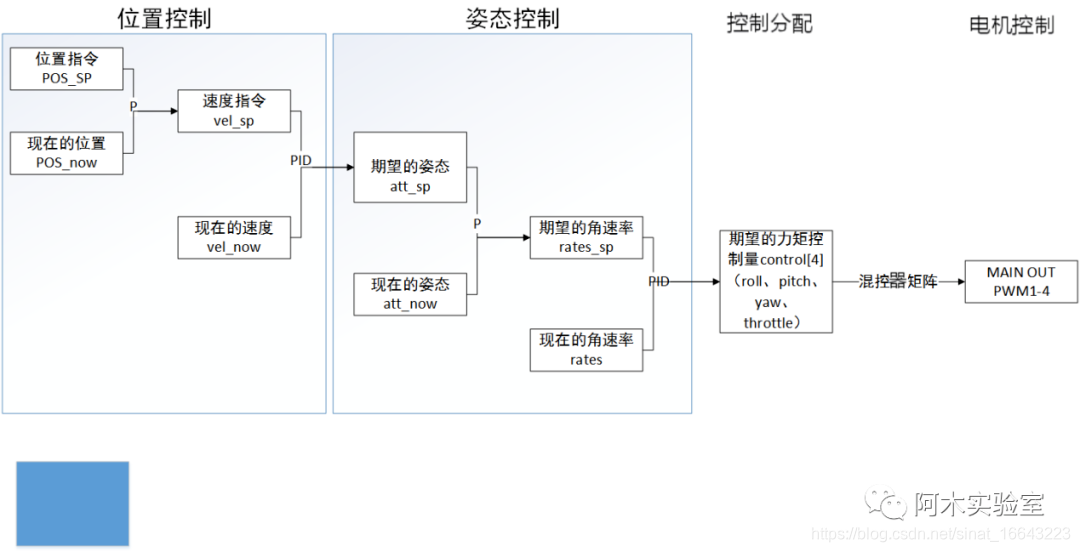
中层:姿态环
- 目标:控制无人机的姿态(横滚角、俯仰角、偏航角),跟踪速度环输出的姿态指令。
- 输入:期望姿态角、实际姿态角(通过 IMU(加速度计 + 陀螺仪)与磁力计融合解算)。
- 输出:计算姿态偏差后,生成期望的角速度指令,传递给角速度环。
-
最内环:角速度环
- 目标:控制无人机的旋转角速度,快速响应姿态环的指令,抑制外界干扰(如阵风)。
- 输入:期望角速度、实际角速度(直接来自陀螺仪测量)。
- 输出:通过 PID 控制器计算出每个电机的期望力矩,最终转换为电机的 PWM 输出信号,驱动无刷电机转动。
二、传感器数据融合:状态估计的核心
PX4 需要实时获取无人机的位置、速度、姿态、角速度等状态,依赖多传感器融合算法(主要是 EKF/UKF 扩展卡尔曼滤波):
- 惯性测量单元(IMU):包含三轴加速度计和陀螺仪,是核心传感器,提供高频(通常 200-1000Hz)的加速度和角速度数据,用于实时姿态解算,但存在漂移问题。
- 磁力计:校正 IMU 的偏航角漂移,提供绝对航向参考(类似指南针)。
- GPS / 北斗:提供室外环境下的绝对位置(经纬度)和速度信息,但室内或遮挡环境下精度下降。
- 气压计:测量大气压力,转换为相对高度(垂直方向位置)。
- 视觉传感器:如摄像头 + 光流模块、深度相机、SLAM 系统,用于室内或无 GPS 环境下的位置和速度估计,补充 GPS 的不足。
通过 EKF 算法,PX4 将上述传感器数据进行时间同步和权重融合,过滤噪声并修正漂移,最终输出高精度的无人机状态估计结果,为控制环提供输入。
三、控制算法:PID 为主,自适应优化
PX4 的各控制环主要采用PID 控制算法,并针对无人机特性进行优化:
- 比例(P)项:快速响应偏差(如位置偏差、速度偏差),决定系统的响应速度。
- 积分(I)项:消除静态误差(如长期悬停时的位置漂移)。
- 微分(D)项:抑制超调和振荡,提高稳定性(如阵风干扰时的快速修正)。
此外,PX4 还针对不同机型(多旋翼、固定翼、垂起固定翼等)和飞行模式,优化了 PID 参数和控制逻辑:
- 例如多旋翼的悬停模式,位置环和速度环的 PID 参数更注重稳定性;
- 高速飞行模式(如固定翼的巡航),则会弱化位置环,强化姿态和角速度的快速响应。
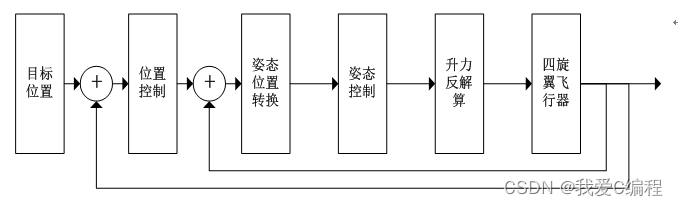
四、执行器驱动:从控制指令到电机动作
PX4 的控制指令最终需要转换为电机的输出:
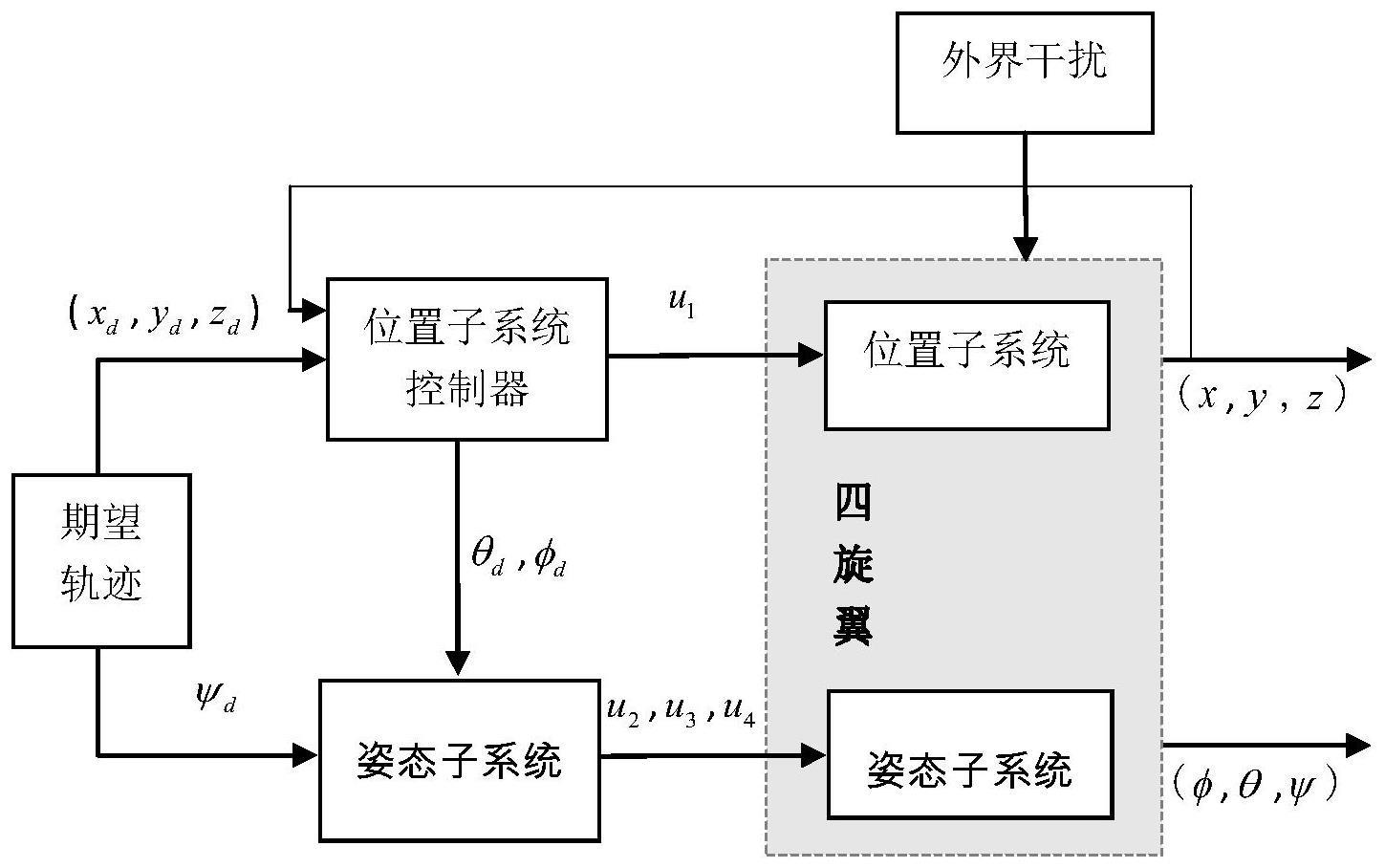
- 电机混控:对于多旋翼(如四旋翼、六旋翼),PX4 通过 “混控矩阵” 将角速度环输出的期望力矩(横滚、俯仰、偏航)和垂直推力,分配到每个电机。例如四旋翼的四个电机通过转速差产生横滚 / 俯仰力矩,通过对角电机的转速差产生偏航力矩。
- 电调通信:PX4 通过 PWM 信号或 CAN 总线与电调通信,将电机转速指令(通常是 0-1000us 的 PWM 信号)发送给电调,电调再驱动无刷电机按照目标转速转动。
- 故障保护:若某一电机或电调故障,PX4 的冗余控制逻辑会重新分配其他电机的输出,尽可能维持飞行稳定(适用于多旋翼冗余设计机型)。
五、飞行模式:适配不同场景的控制逻辑
PX4 通过预设的飞行模式,调整控制环的目标和参数,满足不同任务需求:
- 手动模式:遥控器直接控制角速度环(如摇杆量对应期望角速度),适合手动操控。
- 定高模式:位置环的 z 轴(高度)闭环,x/y 轴手动控制,适合悬停作业。
- 定点模式:x/y/z 轴全位置闭环,无人机自动保持在目标点,适合精准悬停或简单航点飞行。
- 任务模式:通过地面站规划航点,PX4 自动按照路径飞行,位置环跟踪航点坐标,适用于测绘、巡检等任务。
总结
PX4 飞控的控制逻辑是 **“传感器感知→状态估计→多层级闭环控制→执行器驱动”** 的完整流程:通过多传感器融合获得精确状态,利用嵌套 PID 控制环从位置到角速度逐层分解控制目标,最终通过电机混控实现稳定飞行。其开源特性允许开发者根据需求(如室内导航、自主避障)扩展传感器接口或优化控制算法,适应复杂场景。
题目汇总--链接:
【硬件-笔试面试题】硬件/电子工程师,笔试面试题汇总版,持续更新学习,加油!!!-CSDN博客