【51单片机】【protues仿真】基于51单片机温度检测数码管系统
目录
一、主要功能
二、使用步骤
三、硬件资源
四、软件设计
五、实验现象
一、主要功能
1、数码管显示温度
2、按键设置上限阈值
3、测量温度高于上限或低于下限进行声光警报
二、使用步骤
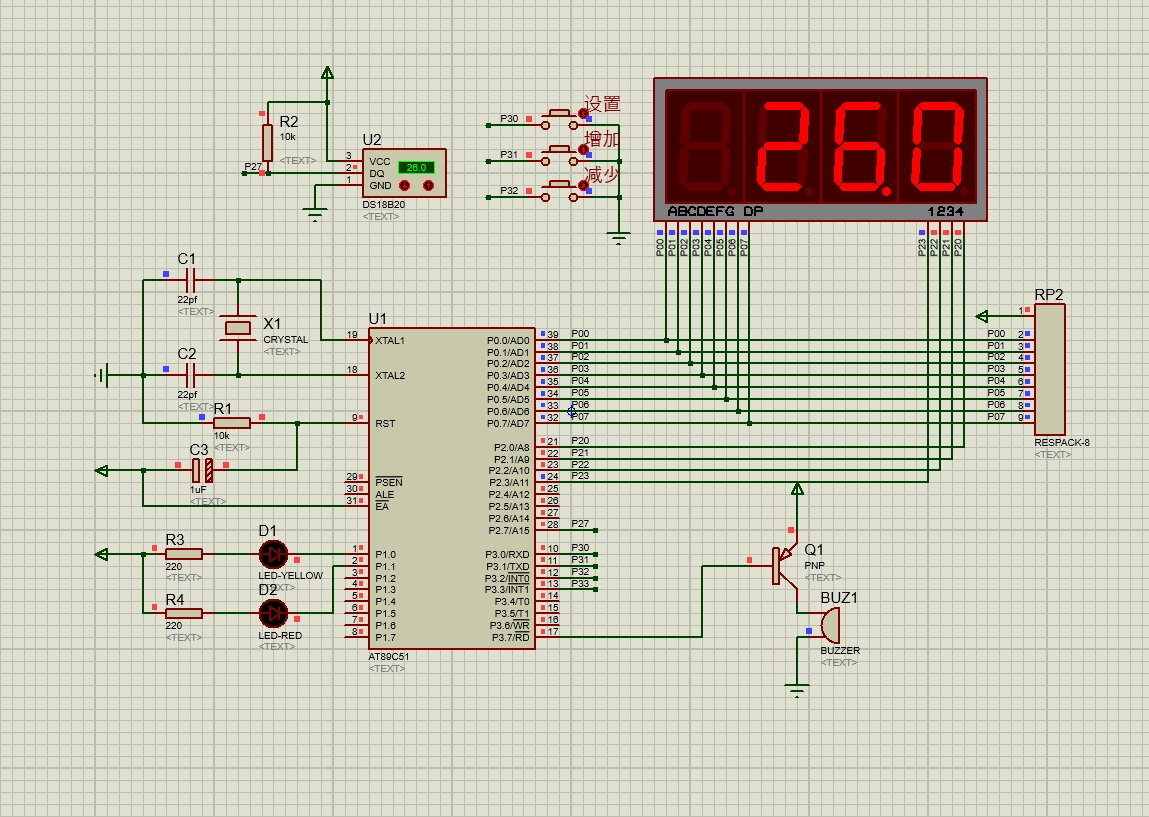
基于51单片机的温度检测数码管系统通常由DS18B20温度传感器、数码管显示模块和报警模块组成,核心功能包括温度采集、实时显示及阈值报警。
三、硬件资源
1、51单片机核心模块
2、按键模块
3、温湿度传感器
4、蜂鸣器模块
5、LED灯模块
6、数码管显示模块
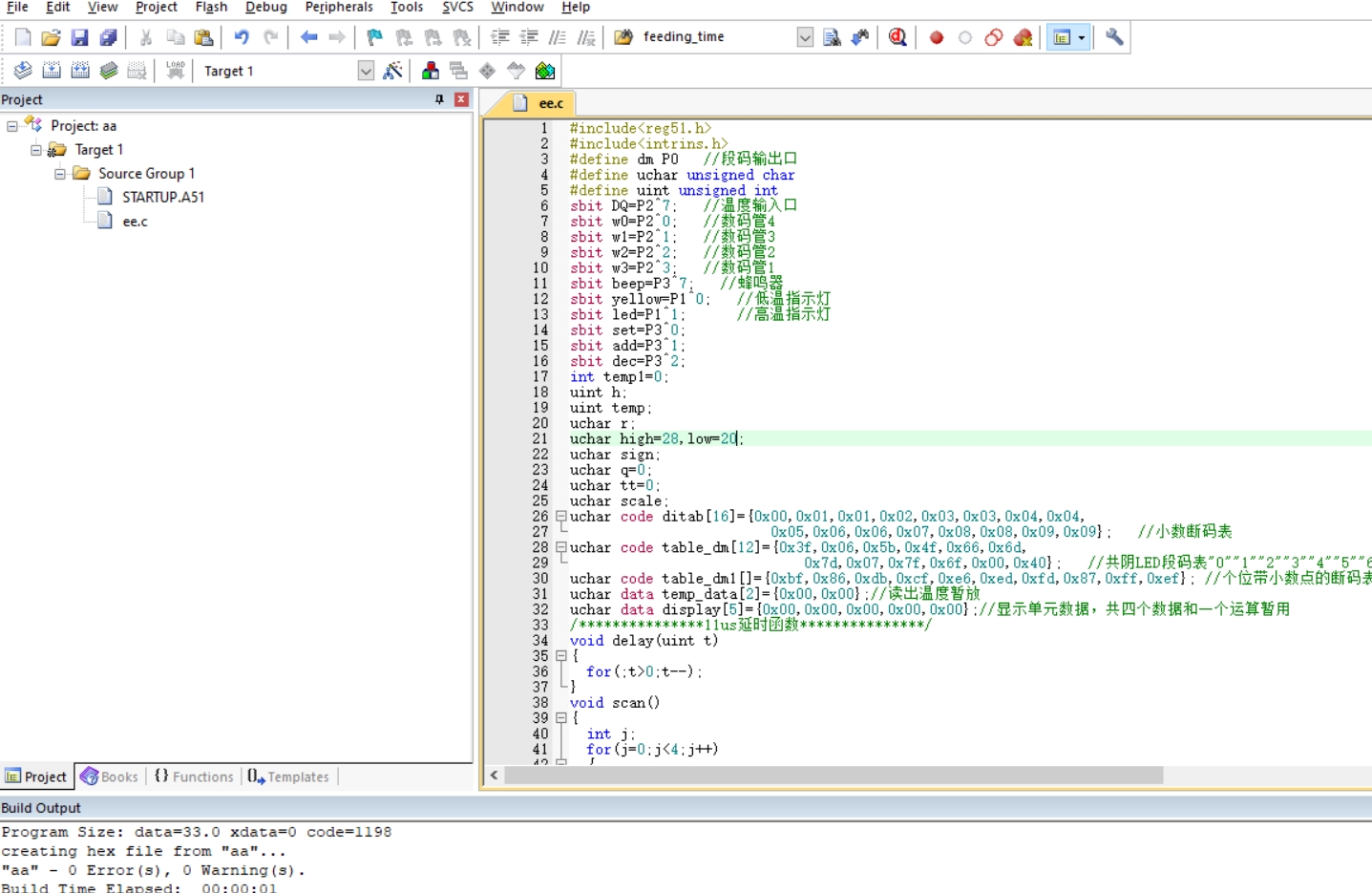
四、软件设计
#include<reg51.h>
#include<intrins.h>
#define dm P0 //段码输出口
#define uchar unsigned char
#define uint unsigned int
sbit DQ=P2^7; //温度输入口
sbit w0=P2^0; //数码管4
sbit w1=P2^1; //数码管3
sbit w2=P2^2; //数码管2
sbit w3=P2^3; //数码管1
sbit beep=P3^7; //蜂鸣器
sbit yellow=P1^0; //低温指示灯
sbit led=P1^1; //高温指示灯
sbit set=P3^0;
sbit add=P3^1;
sbit dec=P3^2;
int temp1=0;
uint h;
uint temp;
uchar r;
uchar high=28,low=20;
uchar sign;
uchar q=0;
uchar tt=0;
uchar scale;
uchar code ditab[16]={0x00,0x01,0x01,0x02,0x03,0x03,0x04,0x04,
0x05,0x06,0x06,0x07,0x08,0x08,0x09,0x09};
uchar code table_dm[12]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,
0x7d,0x07,0x7f,0x6f,0x00,0x40}; //共阴LED段码表"0""1""2""3""4""5""6""7""8""9""不亮""-"
uchar code table_dm1[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef}; //个位带小数点的断码表
uchar data temp_data[2]={0x00,0x00};//读出温度暂放
uchar data display[5]={0x00,0x00,0x00,0x00,0x00};//显示单元数据,共四个数据和一个运算暂用
void delay(uint t)
{
for(;t>0;t--);
}
/**************DS18B20初始化**************/
ow_reset(void)
{
char presence=1;
while(presence)
{
while(presence)
{
DQ=1;_nop_();_nop_();
DQ=0;
delay(50);
DQ=1;
delay(6);
presence=DQ;
}
delay(45);
presence=~DQ;
}
DQ=1;
return presence;
}
/****************写命令函数*****************/
void write_byte(uchar val)
{
uchar i;
for(i=8;i>0;i--)
{
DQ=1;_nop_();_nop_();
DQ=0;_nop_();_nop_();_nop_();_nop_();
DQ=val&0x01;
delay(6);
val=val>>1;
}
DQ=1;
delay(1);
}
/****************读一个字节函数*******************/
uchar read_byte(void)
{
uchar i;
uchar value=0;
for(i=8;i>0;i--)
{
DQ=1;_nop_();_nop_();
value>>=1;
DQ=0;_nop_();_nop_();_nop_();_nop_();
DQ=1;_nop_();_nop_();_nop_();_nop_();
if(DQ)value|=0x80;
delay(6);
}
DQ=1;
return value;
}
/***************读取温度函数***************/
read_temp()
{
ow_reset();
delay(200);
write_byte(0xcc);
write_byte(0x44);
ow_reset();
delay(1);
write_byte(0xcc);
write_byte(0xbe);
temp_data[0]=read_byte();
temp_data[1]=read_byte();
temp=temp_data[1];
temp<<=8;
temp=temp|temp_data[0];
return temp;
}
work_temp(uint tem)
{
uchar n=0;
if(tem>6348)
{
tem=65536-tem;
n=1;
}
display[4]=tem&0x0f;
display[0]=ditab[display[4]];
display[4]=tem>>4;
display[3]=display[4]/100;
display[1]=display[4]%100;
display[2]=display[1]/10;
display[1]=display[1]%10;
r=display[1]+display[2]*10+display[3]*100;
if(!display[3])
{
display[3]=0x0a;
if(!display[2])
{
display[2]=0x0a;
}
}
if(n)
{
display[3]=0x0b;
}
return n;
}
void main()
{
dm=0x00;
w0=0;
w1=0;
w2=0;
w3=0;
for(h=0;h<4;h++)
{
display[h]=0;
}
ow_reset();
write_byte(0xcc);
write_byte(0x44);
for(h=0;h<50;h++)
{
scan();
}
while(1)
{
if(temp1==0)
{
work_temp(read_temp());
scan();
BEEP();
keyscan();
}
else
keyscan();
}
}
五、实验现象
演示视频: