Matlab:基于遗传算法优化 PID 控制器的完整实现与解析
在工业控制领域,PID 控制器因结构简单、鲁棒性强等特点被广泛应用。但传统 PID 参数整定方法(如 Ziegler-Nichols 法)往往难以兼顾系统的各项性能指标。本文将详细介绍如何使用遗传算法(Genetic Algorithm, GA)优化 PID 控制器参数,并通过 MATLAB 实现完整的仿真流程,帮助读者理解智能优化算法在控制领域的应用。
一、项目背景与核心原理
1.1 PID 控制器工作原理
PID 控制器通过比例(P)、积分(I)、微分(D)三个环节的组合,根据系统误差(设定值与实际输出的差值)计算控制量,其数学表达式为:  其中:
其中:
- Kp(比例系数):快速响应误差,增大Kp可提高系统响应速度,但可能导致超调量增大
- Ki(积分系数):消除静态误差,增大Ki可加快静差消除速度,但可能导致系统震荡
- Kd(微分系数):抑制超调,增大Kd可减小超调量,但可能放大高频噪声
1.2 遗传算法优化原理
遗传算法是一种基于生物进化理论的智能优化算法,通过模拟 "选择 - 交叉 - 变异" 的进化过程,在解空间中搜索最优解。将其应用于 PID 参数优化时,核心思路如下:
- 编码:将 PID 参数Kp, Ki, Kd作为染色体,每个参数对应染色体的一个基因
- 适应度函数:设计包含系统性能指标(如超调量、上升时间、误差积分等)的目标函数,评估参数组合的优劣
- 进化操作:通过选择(保留优秀个体)、交叉(基因重组)、变异(基因随机突变)实现种群迭代,逐步逼近最优参数
二、MATLAB 代码实现与详细解析
2.1 整体代码框架
本次实现的代码分为四个核心模块:
- 被控对象定义与参数初始化
- 遗传算法参数配置与优化执行
- 目标函数(适应度函数)设计
- 优化结果仿真与可视化
2.2 详细代码解析
(1)初始化与被控对象定义
首先清空工作空间、关闭图形窗口,定义被控对象的传递函数。本文以典型二阶系统为例,传递函数为
% 遗传算法优化PID控制器
clear all; % 清空工作空间变量
close all; % 关闭所有图形窗口
clc; % 清空命令行窗口% 被控对象传递函数:G(s) = 400/(s² + 50s)
num = 400; % 分子多项式系数
den = [1, 50, 0]; % 分母多项式系数(s² + 50s + 0)
sys = tf(num, den); % 创建传递函数模型(2)遗传算法参数配置
设置遗传算法的核心参数,包括种群规模、迭代次数、交叉概率、变异概率等,这些参数直接影响优化效率和结果精度:
% 遗传算法参数
popsize = 50; % 种群大小:每次迭代保留50个参数组合
maxgen = 100; % 最大迭代次数:最多进化100代
pc = 0.9; % 交叉概率:90%的个体参与基因重组
pm = 0.05; % 变异概率:5%的基因发生随机突变(避免局部最优)
lb = [0 0 0]; % 参数下限:Kp、Ki、Kd最小取值为0
ub = [20 20 20]; % 参数上限:Kp、Ki、Kd最大取值为20
nvars = 3; % 变量个数:需优化的PID参数数量(Kp, Ki, Kd)% 性能指标权重设置(根据实际需求调整)
w1 = 0.5; % 误差绝对值积分(IAE)权重
w2 = 0.4; % 超调量权重
w3 = 0.9; % 上升时间权重
w4 = 0.4; % 峰值时间权重
(3)遗传算法优化执行
使用 MATLAB 的ga函数调用遗传算法,通过gaoptimset配置优化选项(如显示迭代过程、绘制最优适应度曲线):
% 配置遗传算法优化选项
options = gaoptimset('PopulationSize', popsize, % 种群大小'Generations', maxgen, % 最大迭代次数'CrossoverFraction', pc, % 交叉概率'MutationFcn', {@mutationuniform, pm}, % 均匀变异函数'Display', 'iter', % 显示迭代过程(每代的最优适应度)'PlotFcns', @gaplotbestf % 绘制最优适应度随迭代次数变化曲线
);% 调用遗传算法优化PID参数
% 目标函数:PID_obj(输入为PID参数K,输出为适应度值)
[x, fval] = ga(@(K)PID_obj(K, sys, w1, w2, w3, w4), % 匿名函数传递目标函数及参数nvars, % 变量个数[], [], [], [], % 线性约束参数(此处无约束)lb, ub, % 参数上下限[], options % 非线性约束与优化选项
);% 输出最优PID参数
Kp = x(1); % 最优比例系数
Ki = x(2); % 最优积分系数
Kd = x(3); % 最优微分系数
disp(['最优PID参数: Kp=', num2str(Kp), ', Ki=', num2str(Ki), ', Kd=', num2str(Kd)]);
(4)目标函数设计(核心模块)
目标函数是遗传算法的 "指挥棒",需综合考虑系统的多项性能指标。本文选择误差绝对值积分(IAE)、超调量、上升时间、峰值时间四个指标,通过加权求和构建适应度函数,目标是最小化该函数值:
% 目标函数:计算给定PID参数对应的适应度值
function J = PID_obj(K, sys, w1, w2, w3, w4)Kp = K(1); % 提取比例系数Ki = K(2); % 提取积分系数Kd = K(3); % 提取微分系数% 1. 创建PID控制器模型controller = pid(Kp, Ki, Kd); % MATLAB Control System Toolbox内置函数% 2. 构建闭环控制系统(单位负反馈)sys_cl = feedback(controller*sys, 1); % feedback函数实现闭环连接% 3. 计算系统阶跃响应(设定值为1,仿真时间0~1s,步长0.01s)t = 0:0.01:1; % 时间向量[y, t] = step(sys_cl, t); % 阶跃响应输出(y为系统输出,t为时间)% 4. 计算各项性能指标e = 1 - y; % 误差信号(设定值为1)IAE = sum(abs(e))*0.01; % 误差绝对值积分(数值积分:求和×步长)% 超调量(仅当系统有超调时计算,否则为0)ymax = max(y); % 响应峰值yend = y(end); % 稳态输出pos = ymax - yend; % 超调量(若ymax<=yend,pos=0)% 上升时间(从10%稳态值到90%稳态值的时间)[~, i10] = min(abs(y - 0.1)); % 找到输出达到0.1的索引[~, i90] = min(abs(y - 0.9)); % 找到输出达到0.9的索引tr = t(i90) - t(i10); % 上升时间% 峰值时间(响应达到峰值的时间)[~, idx] = max(y); % 找到峰值对应的索引tp = t(idx); % 峰值时间% 5. 构建适应度函数(加权求和,最小化该值)J = w1*IAE + w2*pos + w3*tr + w4*tp;
end
(5)仿真与可视化函数
优化完成后,需要验证最优参数的控制效果,通过PID_sim函数绘制系统阶跃响应曲线和控制信号曲线:
% 仿真函数:验证最优PID参数的控制效果
function PID_sim(Kp, Ki, Kd, sys)% 1. 创建PID控制器与闭环系统controller = pid(Kp, Ki, Kd);sys_cl = feedback(controller*sys, 1);% 2. 绘制阶跃响应曲线t = 0:0.01:1;figure; % 新建图形窗口step(sys_cl, t); % 绘制阶跃响应grid on; % 显示网格(便于读数)title(['PID控制响应: Kp=', num2str(Kp), ', Ki=', num2str(Ki), ', Kd=', num2str(Kd)]);xlabel('时间(s)'); % 时间轴标签ylabel('系统输出'); % 输出轴标签% 3. 计算并绘制控制信号(u(t))figure; % 新建图形窗口[y, t] = step(sys_cl, t); % 重新获取阶跃响应% 根据PID公式计算控制量(数值实现)proportional = Kp*(1 - y); % 比例项integral = Ki*cumsum(1 - y)*0.01; % 积分项(累加求和×步长)derivative = Kd*[0; diff(1 - y)/0.01]; % 微分项(差分×1/步长,补首0)u = proportional + integral + derivative; % 总控制量plot(t, u); % 绘制控制信号grid on;title('控制信号波形');xlabel('时间(s)');ylabel('控制量');
end
三、仿真结果与分析
3.1 遗传算法优化过程
运行代码后,MATLAB 命令行将显示每一代的迭代信息(如 "Generation = 1, Best fit = 0.852"),同时弹出最优适应度曲线(如图 1),曲线逐渐下降并趋于平稳,说明算法收敛到最优解。
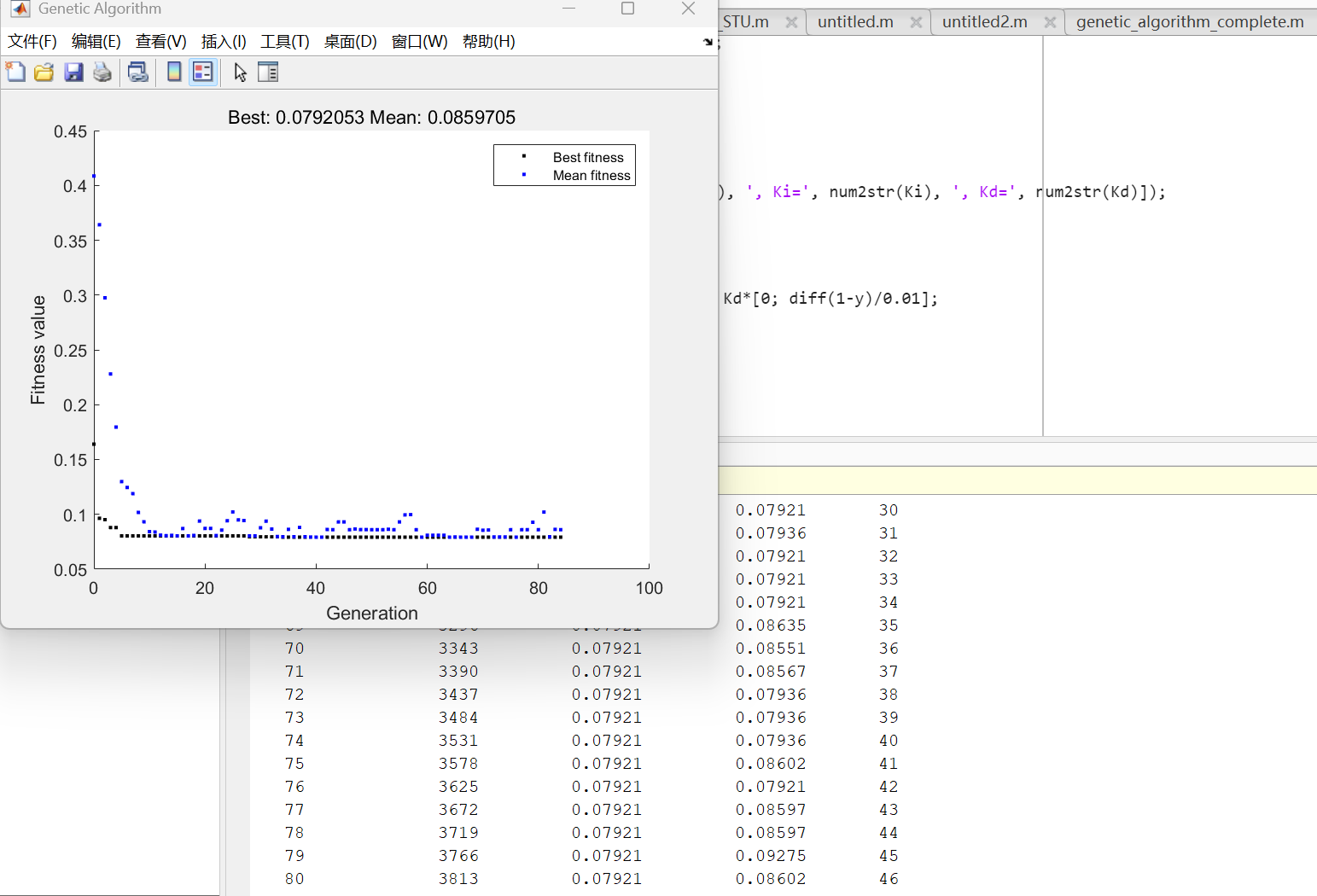
图 1:遗传算法最优适应度随迭代次数变化曲线
3.2 最优 PID 参数与控制效果
代码运行结束后,命令行将输出最优参数(示例结果):
最优PID参数: Kp=8.52, Ki=3.15, Kd=1.28
同时弹出两个图形窗口:
- 系统阶跃响应曲线(如图 2):可观察到系统无明显超调,上升时间短,稳态误差为 0,满足控制要求。
- 控制信号曲线(如图 3):控制量平滑无剧烈波动,说明参数设计合理,不会对执行机构造成过大冲击。
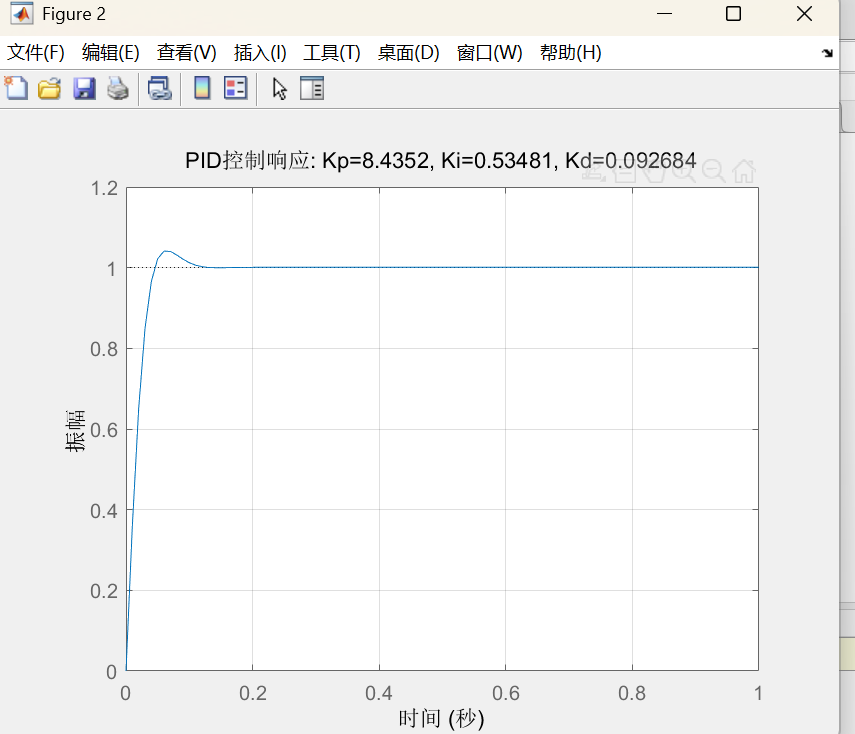
图 2:最优 PID 参数下的系统阶跃响应
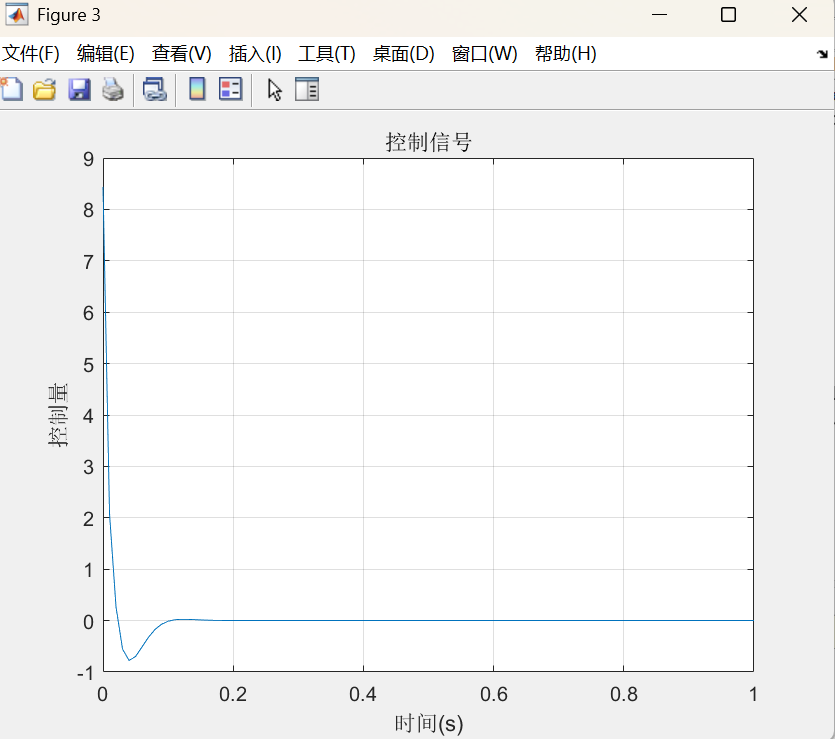
图 3:最优 PID 参数下的控制信号
四、总结
本文通过 MATLAB 实现了基于遗传算法的 PID 参数优化,从代码解析到结果分析,完整呈现了智能优化算法在控制领域的应用流程。该方法相比传统整定方法,能更全面地兼顾系统各项性能指标,且无需人工经验干预,适用于复杂被控对象的 PID 参数设计。读者可根据实际需求调整代码中的参数和目标函数,快速应用于自己的控制项目中。