【嵌入式】【树莓派】【大疆PSDK】用树莓派4B开发大疆行业无人机应用系统小结-【硬件篇】
近期在开发行业无人机应用软件,服务器下发飞行控制命令如航线任务,通过蜂窝移动网络或卫星通信网络传输到无人机机载嵌入式系统,该系统处理任务消息并通过无人机飞控硬件与软件接口,与无人机飞控交互,同时机载嵌入式系统收集无人机状态数据,上传到服务器给平台软件处理分析。本文以大疆行业无人机M350-RTK为例,使用M350-RTK的E-Port接口、PSDK等软硬件接口,树莓派4B做原型,实现了上述嵌入式软硬件系统。本文介绍硬件系统。
DJI PSDK 硬件接口
DJI针对不同的行业机型和设备类型,主要有E-Port、E-Port V2、SkyPort V2、SkyPort V3等,适配机型见参考:
https://developer.dji.com/doc/payload-sdk-tutorial/cn/model-instruction/choose-hardware-platform.html
用DJI 开发套件搭建硬件系统
参考:https://developer.dji.com/doc/payload-sdk-tutorial/cn/payload-quick-start/drone-port.html
E-port接口的硬件接线,M350-RTK无人机与开发者套件的连接示意图,
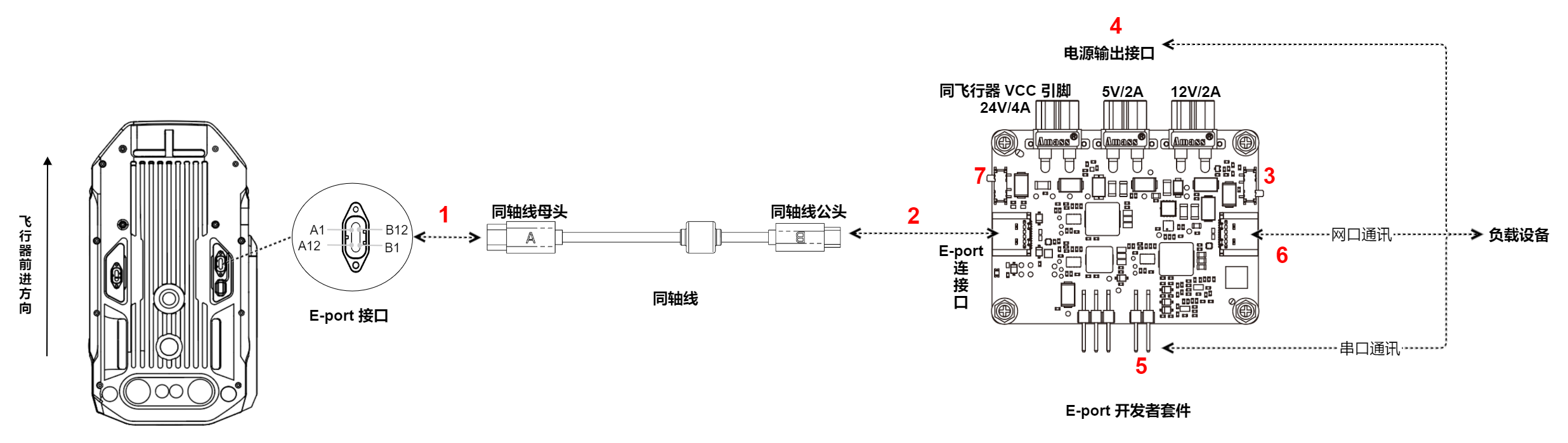
实物图,注意同轴线的接头区分AB面。

E-port转接板与树莓派4B连接示意图
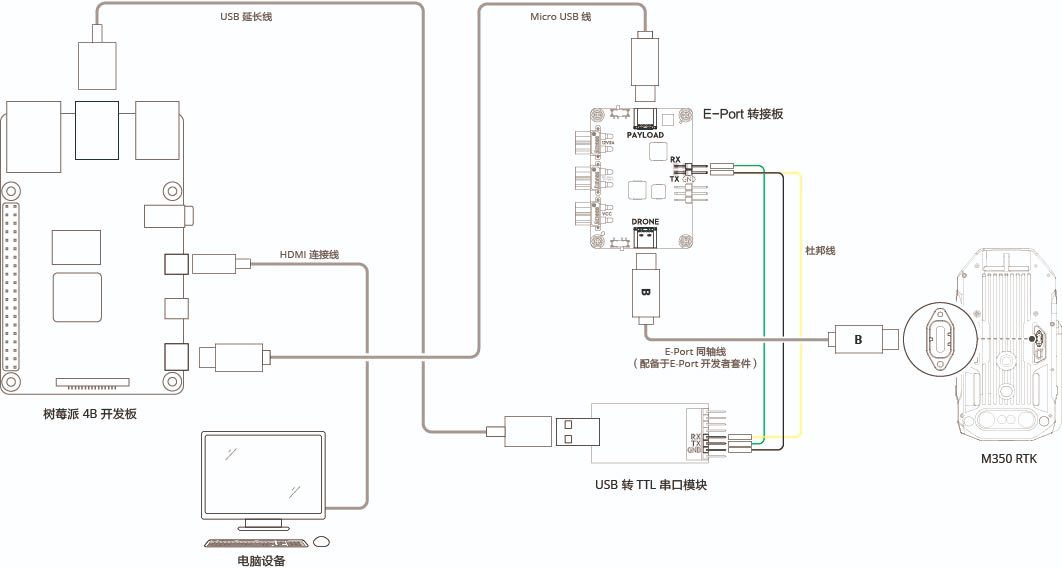
实际硬件连接,用远程登录树莓派开发,所以去除HDMI连接线,去除USB双头公头的线,用电脑USB接口为给树莓派供电。
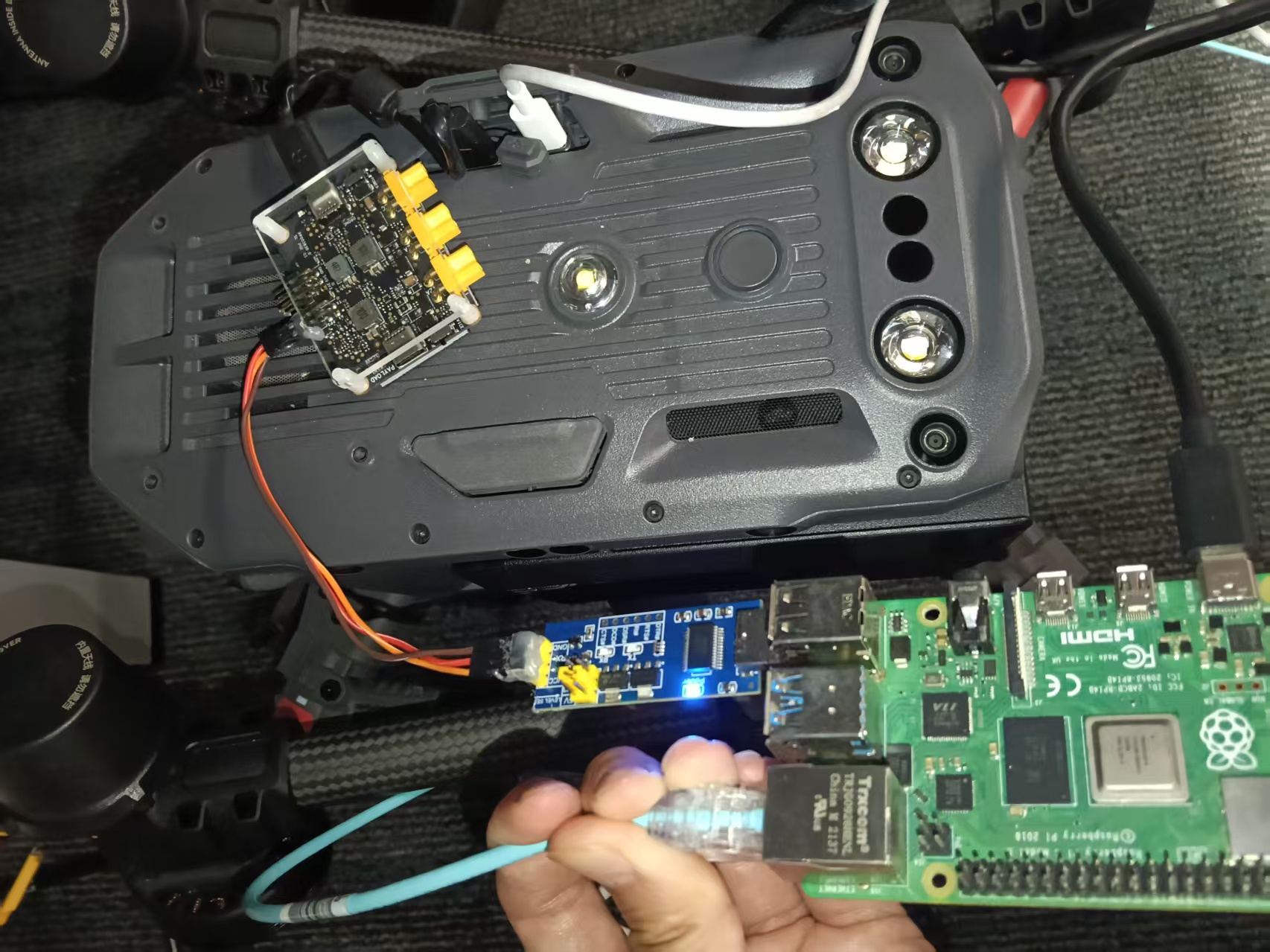
注意,E-port上的串口通过USB转TTL模块连接到树莓派的USB口,也可以直接与树莓派的串口连接。
下一篇,正在准备介绍下软件开发环境的搭建。