树莓派传感器扩展板资料
买的树莓派扩展板。但资料在浏览器没法打开。特抄过来,方便查看。
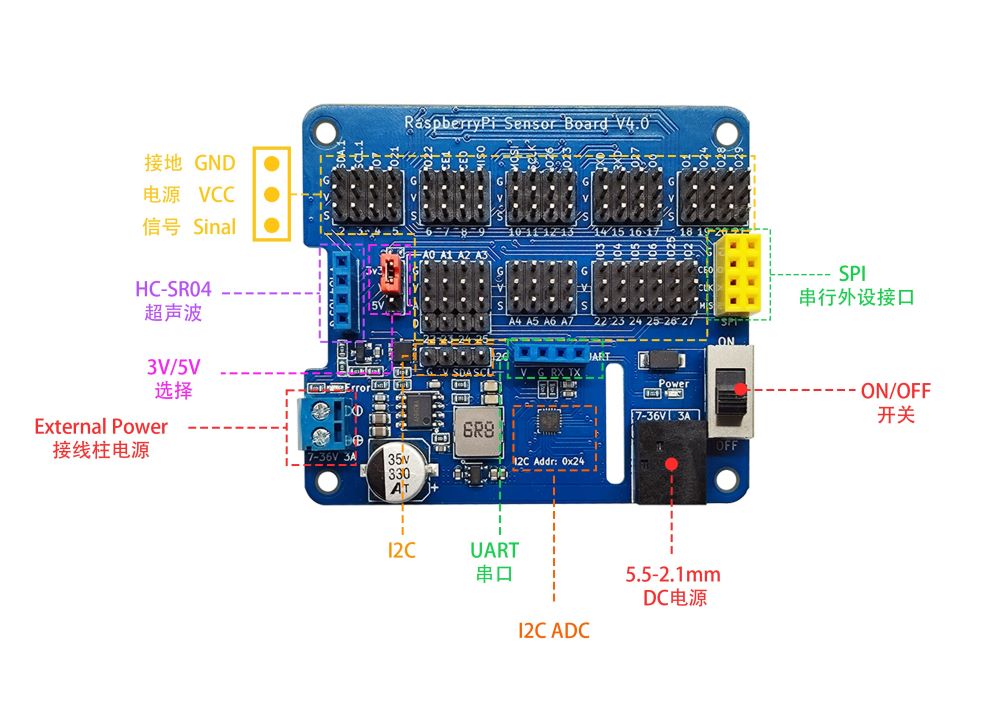
树莓派传感器扩展板是由深圳市易创空间科技有限公司专门为方便树莓派外接传感器而设计。
本扩展板适用于 Raspberry Pi Zero/Zero W/Zero WH/A+/B+/2B/3B/3B+/4B。
可以通过5.5-2.1mm的DC头或者接线柱可以给树莓派供电。
预留了RF24L01模块,HC-SR04超声波模块,I2C接口,UART接口,支持8路ADC。
同时空出摄像头和 DIP 显示屏排线接口。
特点
- 内置10bit ADC MCU,支持8路ADC检测,ADC值范围为0 ~ 1023
- 支持树莓派 2B/3B/3B+/4B/zero
- 5.5x2.1DC头与接线端子外部供电。
- 外接传感器供电电压3V3与5V切换
- 板载DC-DC降压芯片 宽电压输入:5~36V 电压输出:5V 最大电流输出: 5A ,可以给树莓派直接供电
MCU规格
- 工作电压:3.3V和5V 根据跳线帽选择 ADC检查电压
- 与树莓派通信方式: I2C 速率 1~400K
- I2C地址: 0x24,背面可以配置地址
- IO: 8路ADC检测 对应引脚A0~A7
- 8路扩展模式支持ADC输入,GPIO,PWM(只A1-A2支持),
寄存器
扩展板MCU I2C地址为0x24,寄存地址说明如下:
-
0x01寄存器为模式设置
如下模式可以设置
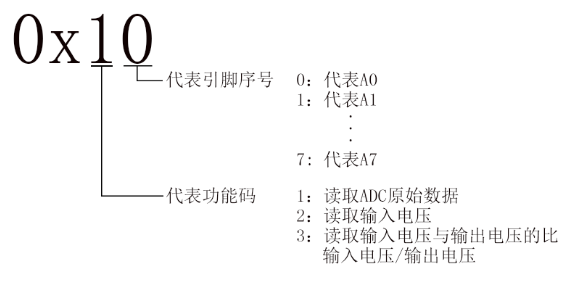
命令 模式 功能描述 0x01 输入上拉 9x02 输入下拉 0x04 浮空输入模式 0x08 输出模式 可把引脚配置为高低电平输出模式,然后使引脚输出高电平或者低电平 0x10 ADC模式 可把引脚配置为ADC模式,然后读取引脚的ADC值,精度10位,ADC值范围为0 ~ 1023 0x20 PWM输出模式 可配置扩展板的PWM输出频率(1 ~ 10000Hz),然后把引脚为PWM输出模式,再配置引脚PWM输出的占空比(12位精度:0 ~ 4095),然后使引脚输出PWM,可用于驱动舵机 -
0x10 ~ 0x17: 读取ADC原始数据
-
0x20 ~ 0x27: 读取输入电压,单位是mv
-
0x30 ~ 0x37: 读取输入电压与输出电压的比,输入电压/输出电压(0~100)
-
0x40 ~ 0x47: 读取或者是设置A0-A7的数字值
-
0x51 ~ 0x52: 设置A1-A2的PWM占空比
-
0x61 ~ 0x62: 设置A1-A2的PWM的频率
树莓派I2C库安装
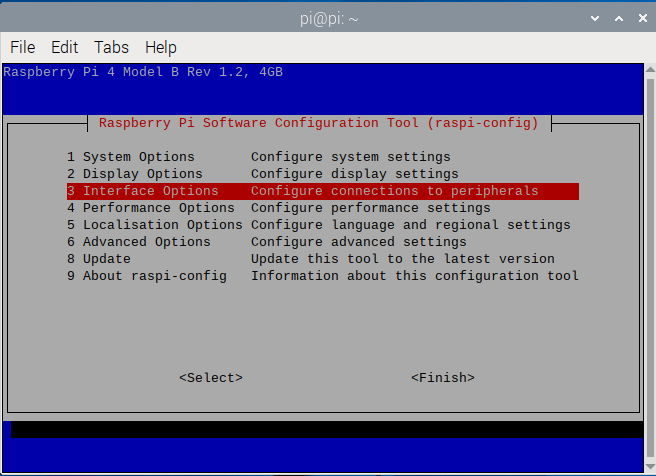
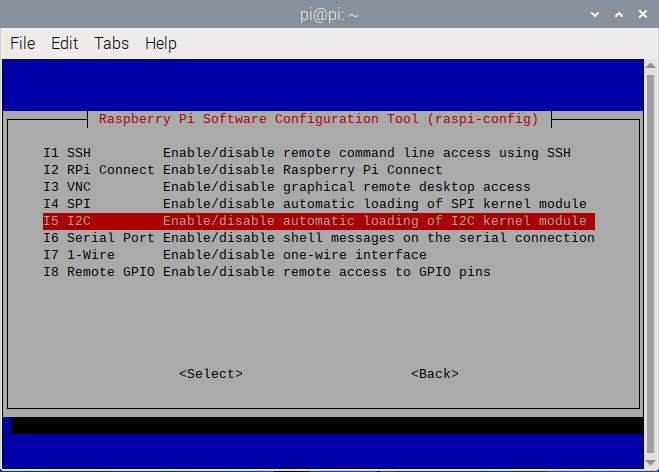
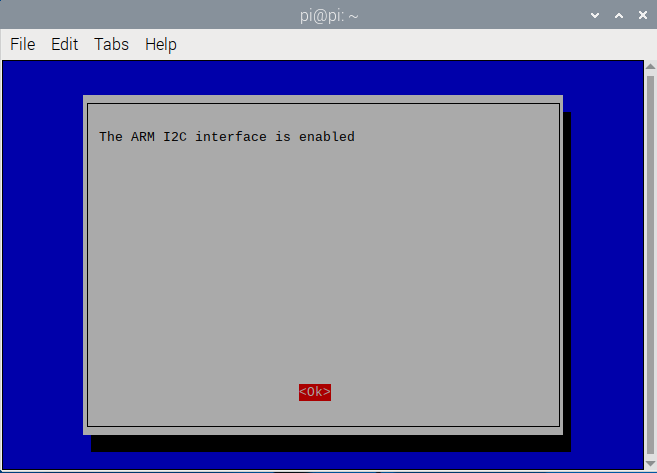
打开树莓派终端输入"sudo raspi-config"命令,然后按照下图顺序依次操作即可。
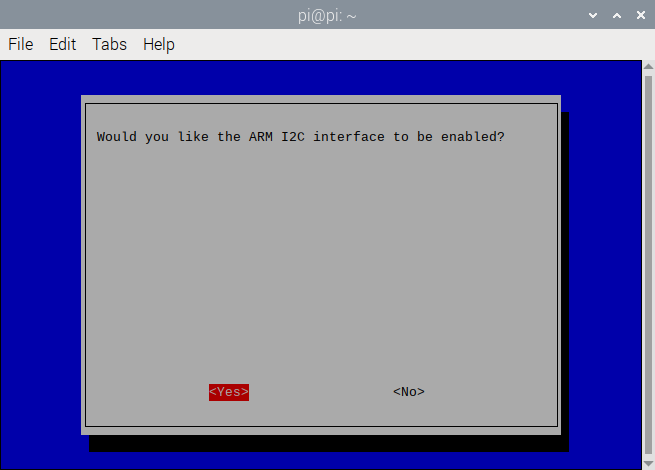
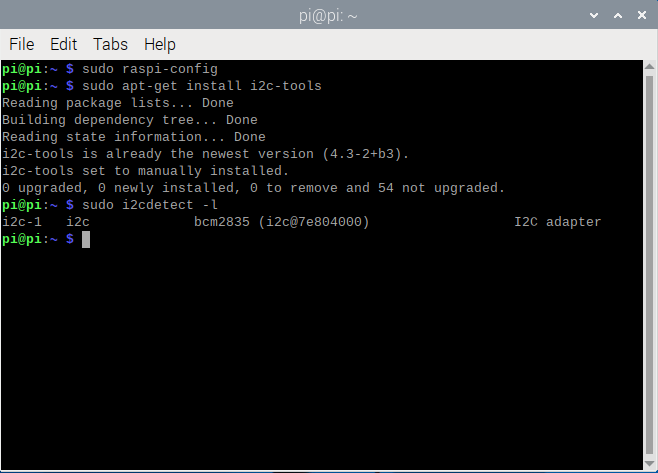
以上就是开启树莓派I2C,接下来我们安装树莓I2C库在终端输入“sudo apt-get install i2c-tools”,输入完成后就可以看到正在下载I2C库,安装完成之后可以在终端输入“sudo i2cdetect -l”检测是否安装正确,若出现类似于下面的信息就说明安装正常。
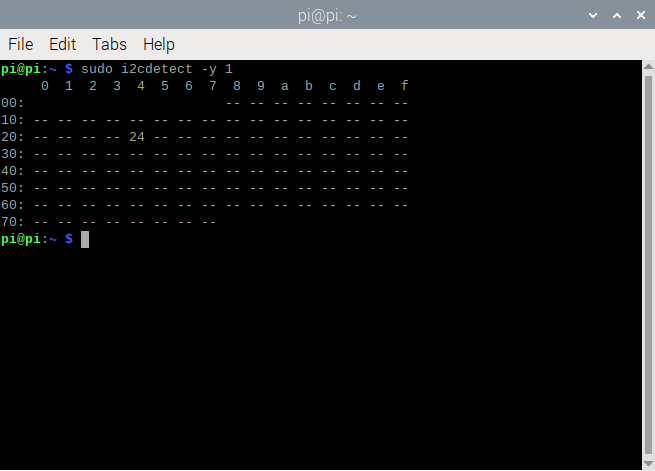
在终端输入“sudo i2cdetect -y 1”命令即可扫描接在I2C总线上的所有I2C设备,并打印出该设备的I2C总线地址,且我们的扩展板的I2C地址为0x24。
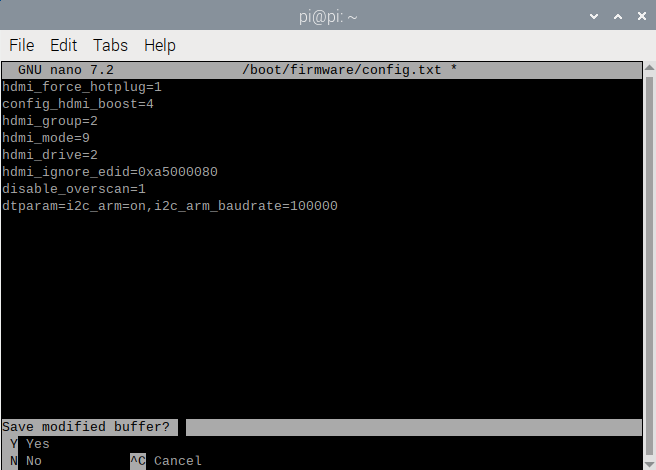
!!! 编辑config.txt文件设置树莓派IIC总线速度
sudo nano /boot/config.txt点击复制错误复制查找包含“dtparam=i2c_arm=on”的行,添加“,i2c_arm_baudrate=100000”,其中100000是新设置的速度(100kbit /s),注意i2c前面的逗号。完整代码如下:
dtparam=i2c_arm=on,i2c_arm_baudrate=100000点击复制错误复制这样可以启用I2C总线的同时,也完成了新波特率的设置。编辑完成后,使用CTRL-X,然后选择Y,再按下回车键,保存文件并退出。
重新启动树莓派,使新的设置生效:
sudo reboot点击复制错误复制读取ADC模拟值
众所周知,Raspberry Pi中没有ADC,因此不能直接读取传感器的模拟值。在扩展板内置的I2C ADC MCU的帮助下可以读取10位ADC这就意味着可以在树莓派上使用模拟传感器,且一共有8个可用的接口。
模拟传感器将模拟电压输入10位模数转换器。模数转换器将模拟数据转换成数字数据后,通过I2C将数字数据输入到树莓派中。
Python 代码
from sensor_expansion_board_i2c import IoExpansionBoardI2c
from smbus2 import SMBus
import time# 初始化I2C总线
i2c_bus = 1 # 树莓派上的I2C总线号,通常是1
i2c_address = 0x24 # I2C设备地址# 创建IoExpansionBoardI2c对象
io_expansion_board_i2c = IoExpansionBoardI2c(i2c_bus, i2c_address)# 设置引脚7为ADC模式
io_expansion_board_i2c[7].mode = IoExpansionBoardI2c.ADC_MODE# 循环读取ADC值
try:while True:adc_value = io_expansion_board_i2c[7].adc_valueprint(adc_value)time.sleep(1) # 延时1秒
except KeyboardInterrupt:# print("程序已停止")pass
C++ 代码
#include <chrono>
#include <iostream>
#include <thread>#include "gpio_expansion_board.h"// 创建 GpioExpansionBoard 实例
GpioExpansionBoard gpio_expansion_board;int main() {std::cout << "Setup" << std::endl;// 配置E0为ADC模式if (!gpio_expansion_board.SetGpioMode(GpioExpansionBoard::kGpioPinE0, GpioExpansionBoard::kAdc)) {std::cerr << "Failed to set GPIO mode for E0" << std::endl;return -1;}while (true) {// 读取E0的ADC值并打印uint16_t adc_value = gpio_expansion_board.GetGpioAdcValue(GpioExpansionBoard::kGpioPinE0);std::cout << "ADC value: " << adc_value << std::endl;// 延时100毫秒std::this_thread::sleep_for(std::chrono::milliseconds(100));}return 0;
}
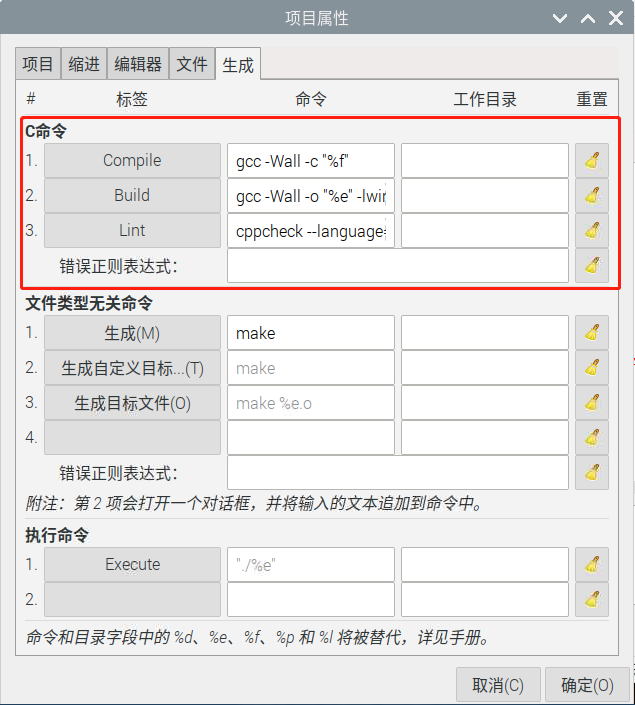
如果在生成当前文件时出现以下错误:

如果出现这种问题时请修改生成命令入下图设置:
Compile gcc -Wall -c "%f"
Build gcc -Wall -o "%e" -lwiringPi "%f"
Lint cppcheck --language=c --enable=warning,style --template=gcc "%f"
PWM输出
树莓派原本的硬件pwm只有GPIO1 GPIO26 GIPIO23 GPIO24对应的WiringPi就是1,26,23,24但是不同库支持的输出不一样,使用和树莓派本身的硬件资源冲突,比如声卡,定时器等。所以本扩展板外扩2路pwm可以很好解决这个问题。但是只有A1和A2两个引脚支持
舵机控制
有了PWM的支持,那么我们也可以将此pwm扩展成驱动舵机的接口