论文介绍:Fast3R,更快的多视图 3D 重建的新范式
论文介绍:Fast3R,多视图 3D 重建的新范式
在计算机视觉领域,多视图 3D 重建(Multi-view 3D Reconstruction)长期以来都是一个核心挑战。它旨在从一系列不同视角的二维图像中,重建出精确的三维几何结构和相机姿态。传统方法,如基于运动结构法(SfM)和多视图立体视觉(MVS)的流水线,通常需要复杂的预处理和迭代对齐步骤,尤其是在处理大规模、非结构化的图像集时,其效率和可扩展性会受到严重限制。
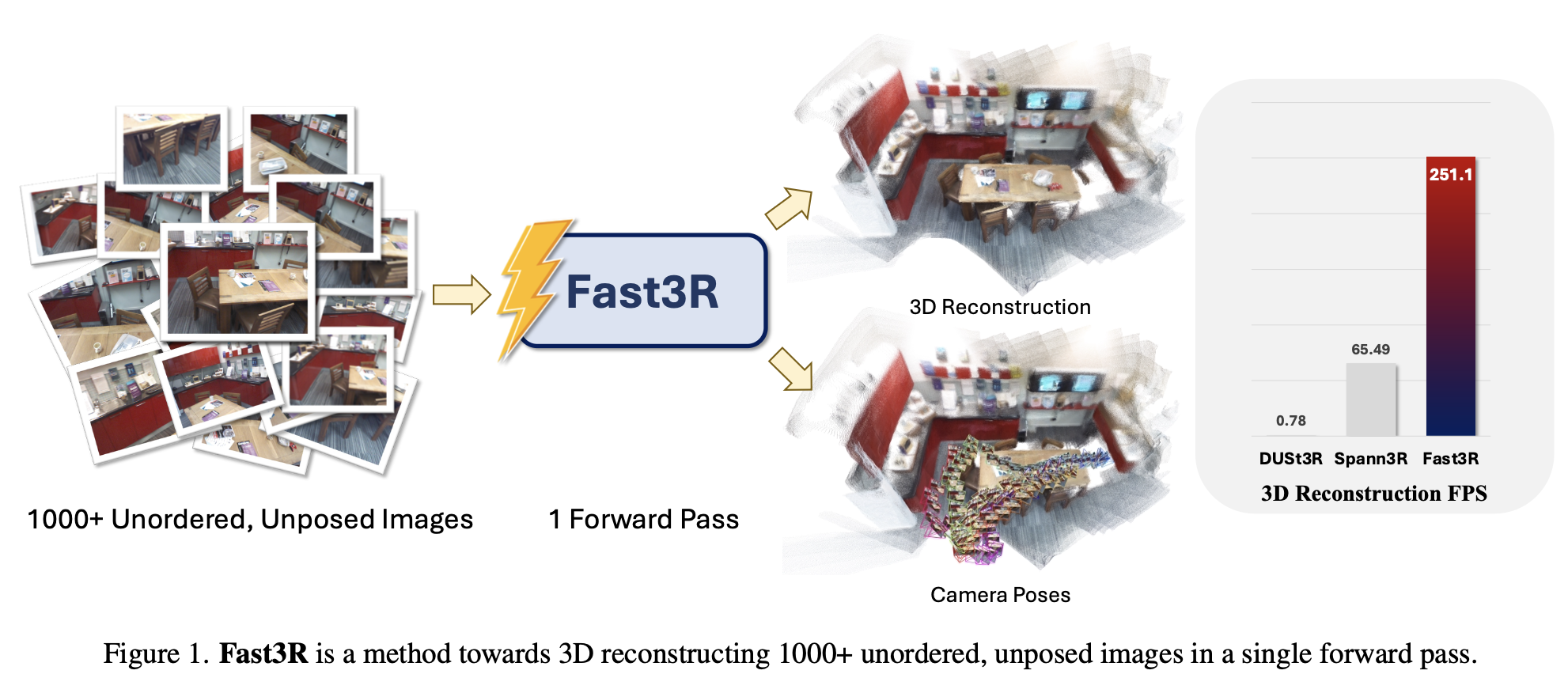
正是在这样的背景下,Fast3R(Fast 3D Reconstruction) 应运而生。它提出了一种革命性的方法,通过引入基于 Transformer 的架构,从根本上改变了 3D 重建的范式,实现了在单次前向传播中处理上千张图像的壮举,为大规模 3D 重建开启了全新的可能性。
核心原理与架构
Fast3R 的成功并非偶然,其背后是精心设计的模型架构和训练策略。它的核心思想是:与其将多视图 3D 重建任务拆解为无数个耗时且冗余的“成对”处理和对齐步骤,不如从一开始就将其作为一个整体来解决。正如 Fast3R 论文摘要中所述,该方法是一个“对 DUSt3R 的一种新颖的多视图泛化,通过并行处理许多视图来实现高效且可扩展的 3D 重建”[^1]。
1. 基于 Transformer 的多视图处理
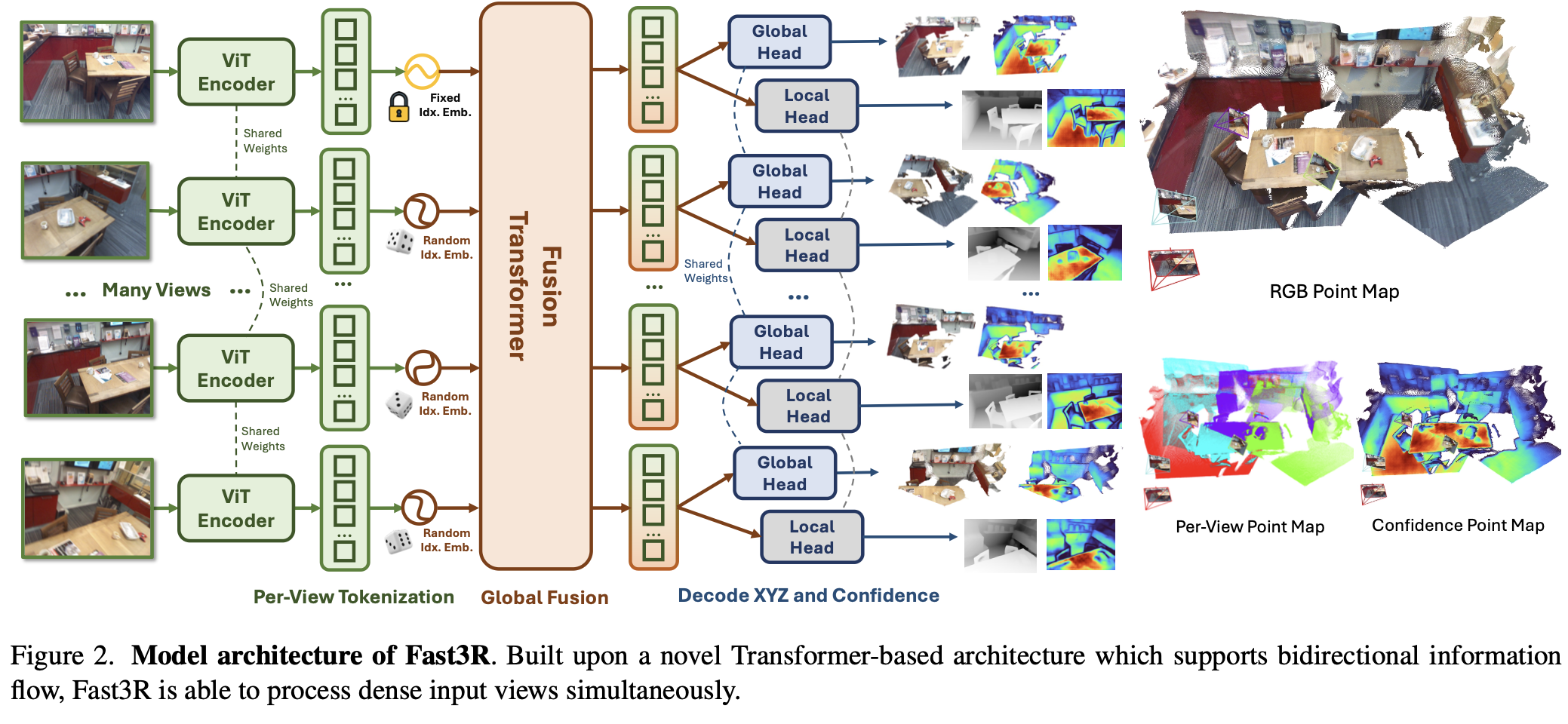
Fast3R 的模型架构借鉴了在大型语言模型中取得巨大成功的 Transformer 结构。它将输入的 N 张图像作为一个整体序列来处理,而非像 DUSt3R 那样两两配对。根据论文描述,“Fast3R 的 Transformer-based 架构在单次前向传播中处理 N 张图像,绕过了迭代对齐的需求”[^1]。这种处理方式使得模型能够:
- 并行处理: 所有图像在一次前向传播中被同时处理,极大地提高了推理速度。
- 捕获全局上下文: Transformer 的自注意力机制(self-attention)允许模型直接学习图像序列中的长程依赖关系。这意味着每一张图像不仅能从自身中学习信息,还能直接利用序列中所有其他图像提供的上下文信息,从而更精确地推断出 3D 结构。
2. 模型输出:从全局到局部
Fast3R 模型最直接、最基础的输出是两种类型的点云,它们共同构成了重建的核心:
- 全局点云 (X_GX\_{G}X_G):这是模型最关键的输出。它直接在统一的全局坐标系中(通常是第一张图片的坐标系)预测出整个场景的 3D 点云。这一步骤就直接完成了全局对齐,彻底绕过了 DUSt3R 中最复杂、最耗时的拼接过程。
- 局部点云 (X_LX\_{L}X_L):同时,模型也预测出每一张图片在自身局部坐标系中的点云。这些局部点云可以被视为全局点云的补充,正如论文图 14 所解释的,“全局点图为点的提供了很好的锚点,而局部点图则利用这些锚点(通过将它们与全局点图对齐)来提供更精确的点位置”[^1]。
可以把 全局点云 理解为一个建筑的整体蓝图,它提供了所有结构的主体框架和位置信息;而 局部点云 则是对每一块区域的详细测量,用来填充和校正蓝图中的细节,确保最终重建的精准度。
训练策略:位置插值与泛化能力
一个引人深思的问题是,如果模型在训练时只使用少量图片(例如 20 张),它如何在推理时处理多达上千张的图片,并保证效果?Fast3R 论文给出的答案是 “位置插值”(Position Interpolation) 这一巧妙的训练策略。
1. 训练数据与任务
Fast3R 的训练数据并非专门构建的 1000 张图片样本,而是使用了现有的、包含真实 3D 扫描数据的高质量数据集,如 CO3D、ScanNet++、ARKitScenes 等。这些数据集提供了图像、相机参数以及对应的 3D 真实点云。在训练时,模型被设定为从一个包含 1000 个可能图像索引的大型索引池中,随机采样 20 个索引。
模型的训练任务是:
- 点云回归: 学习预测出与这些图片对应的全局点云和局部点云。
- 损失函数: 通过计算预测的点云与数据集中提供的真实点云之间的距离来优化模型。论文中用到的 损失函数 如下:
L=∑i=1NLglobal(XGi,XG,gti)+λ∑i=1NLlocal(XLi,XL,gti)\mathcal{L} = \sum_{i=1}^N \mathcal{L}_{\text{global}}(X_G^i, X_{G, \text{gt}}^i) + \lambda \sum_{i=1}^N \mathcal{L}_{\text{local}}(X_L^i, X_{L, \text{gt}}^i)L=i=1∑NLglobal(XGi,XG,gti)+λi=1∑NLlocal(XLi,XL,gti)
其中,XGiX_G^iXGi 和 XLiX_L^iXLi 分别是第 iii 张图像预测的全局和局部点云,而 XG,gtiX_{G, \text{gt}}^iXG,gti 和 XL,gtiX_{L, \text{gt}}^iXL,gti 则是对应的真实点云。通过这种方式,模型被迫学习如何从任意位置的图片中准确地回归出 3D 结构。
2. 突破泛化瓶颈
通过这种随机采样和位置插值的训练方式,Fast3R 赋予了模型强大的泛化能力。它教会了模型:
- 理解相对位置,而非绝对位置: 模型学习的是任意两张图片之间的几何关系,而不是它们在训练序列中的固定位置。
- 处理可变长度序列: 在推理时,即使输入图像的数量远超 20 张,模型也能像处理训练时一样,将它们视为一个整体,并利用其学到的位置插值能力来预测出全局点云。
论文中的实验也证实了这一点:“通过广泛的实验,我们证明了该方法在相机姿态估计和 3D 重建方面实现了最先进的性能”[^1]。并且,随着输入的图片数量增加,模型的性能会持续提升,因为它能够利用更多图像提供的额外上下文信息,从而生成更精确的 3D 重建结果。
Fast3R 与 DUSt3R 的全面比较
将 Fast3R 与其前身 DUSt3R 进行比较,能更清晰地看到其在 3D 重建领域的巨大进步。DUSt3R 的核心方法是“自监督地学习图像对之间的稠密对应和相对姿态”[^2],这奠定了其“成对”处理的本质。
| 特性 | DUSt3R | Fast3R |
|---|---|---|
| 核心架构 | 基于成对的 3D 重建。基于一对图像预测点图和相对姿态。 | 基于多视图的 3D 重建。基于 Transformer 一次性处理所有图像。 |
| 处理流程 | 1. 两两配对:处理所有图片对,生成局部的、相对的 3D 信息。<br>2. 全局对齐:通过一个额外的、复杂的优化过程,将所有成对信息拼接成一个统一的 3D 场景。 | 1. 一次前向传播:将所有图片输入模型。<br>2. 直接生成:模型直接输出统一坐标系下的全局点云。 |
| 效率瓶颈 | 处理 N 张图片需要处理 O(N^2) 个图片对。全局对齐过程计算复杂、耗时。 | 仅需一次前向传播,计算量与图片数量大致呈线性关系。论文中提到,“我们的方法比 DUSt3R 快 30 倍以上,并且能够处理超过 1000 张图像,而 DUSt3R 在 48 张图像时就会遇到内存溢出”[^1]。 |
| 可扩展性 | 显存需求随图片数量呈指数级增长。论文中提到,DUSt3R 在处理 48 张图片时就会因内存溢出而崩溃。 | 通过位置插值技术,能够稳定处理超过 1000 张图片,内存效率极高。 |
| 性能表现 | 在小规模数据集上表现出色,但受限于其架构,难以扩展到大规模场景。 | 在相机姿态估计和 3D 重建方面表现出更先进的性能,并且随着输入视图数量的增加,性能持续提升。 |
从上述对比可以看出,Fast3R 的优越性是架构层面的。DUSt3R 就像一个团队,每个成员只负责处理两个任务,然后由一个中央协调人来整合所有结果。当任务数量增加时,协调人的工作量呈指数级增长,最终导致系统崩溃。而 Fast3R 则像一个高度集成的智能系统,能够一次性处理所有任务,直接输出最终结果,从而彻底消除了中间的协调瓶颈。
总结与展望
Fast3R 不仅仅是 DUSt3R 的简单改进,它代表了多视图 3D 重建方法的一次重大范式转变。通过将 Transformer 架构引入该领域,它成功地将 3D 重建从一个依赖复杂流水线和迭代对齐的计算密集型任务,转化为一个高效、可扩展的单次前向传播任务。
这一创新为计算机视觉的多个应用领域打开了新的大门,例如大规模城市或室内场景的快速重建、机器人导航中的实时环境建模、以及虚拟现实/增强现实的内容生成等。Fast3R 的出现证明了,通过巧妙的架构设计和训练策略,深度学习模型能够以前所未有的效率处理复杂的几何任务,也为未来多视图 3D 重建技术的发展指明了方向。
