(论文速读)Navigation World Models: 让机器人像人类一样想象和规划导航路径
论文题目:Navigation World Models(导航世界模型)
会议:CVPR2025
摘要:导航是具有视觉运动能力的智能体的一项基本技能。我们引入了导航世界模型(Navigation World Model, NWM),这是一种基于过去观测和导航动作预测未来视觉观测的可控视频生成模型。为了捕捉复杂的环境动态,NWM采用了条件扩散转换器(CDiT),在人类和机器人代理的各种自我中心视频集合上进行训练,并扩展到10亿个参数。在熟悉的环境中,NWM可以通过模拟并评估它们是否达到预期目标来规划导航轨迹。与具有固定行为的监督式导航策略不同,NWM可以在规划期间动态地合并约束。实验证明了它在从零开始规划轨迹或通过从外部政策中采样的轨迹排序方面的有效性。此外,NWM利用其学习的视觉先验,从单个输入图像中想象不熟悉环境中的轨迹,使其成为下一代导航系统的灵活而强大的工具。
源码链接:https://amirbar.net/nwm
引言
想象一下,当你需要从办公室走到会议室时,你的大脑会自动模拟可能的路径:走直线还是绕过拥挤的区域?是否需要避开正在施工的走廊?人类天生具备这种"心理模拟"能力,可以在脑海中预演不同的行动方案。然而,当前的机器人导航系统却缺乏这种灵活性——它们更像是按照固定程序行事的自动机,无法在面对新约束时灵活调整策略。
现有导航系统的局限性
刚性的导航策略
目前最先进的机器人导航系统,如NoMaD和GNM,本质上是"硬编码"的。一旦训练完成,这些系统就无法轻易适应新的约束条件。比如,如果突然需要机器人"不能左转"(也许因为左侧通道正在维修),传统系统就需要重新训练才能适应这一变化。
缺乏动态计算分配
人类在面对复杂导航任务时会投入更多精力思考,但现有的导航模型无法根据任务难度动态调整计算资源。无论是简单的直线行走还是复杂的迷宫导航,它们都使用相同的计算量。
无法进行"想象规划"
人类规划路径时会在脑海中模拟:"如果我走这条路会看到什么?"、"那样走会不会更快?"。现有系统缺乏这种"心理模拟"能力,无法预演不同行动方案的结果。
Navigation World Models:技术突破
核心思想
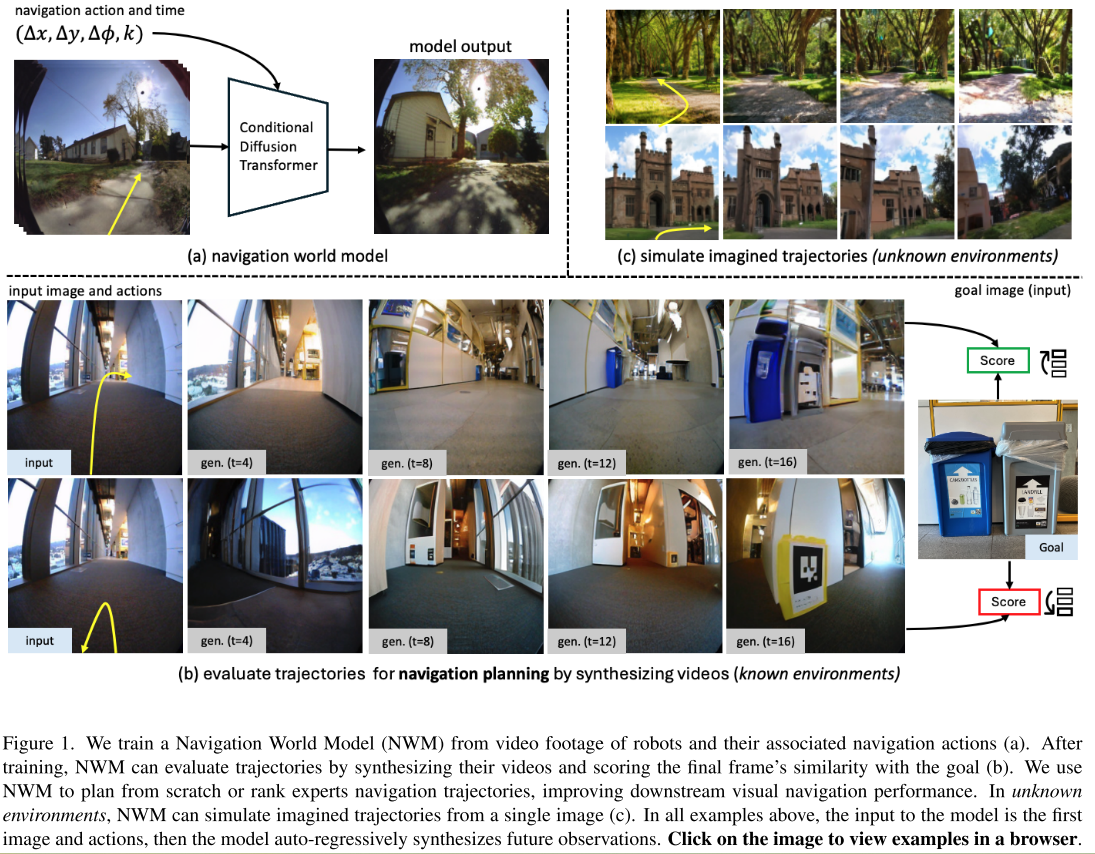
NWM的核心思想是训练一个"世界模型",能够基于当前观察和计划的动作序列,预测机器人将会看到的未来画面。这就像给机器人安装了一个"想象力引擎"。
关键技术创新
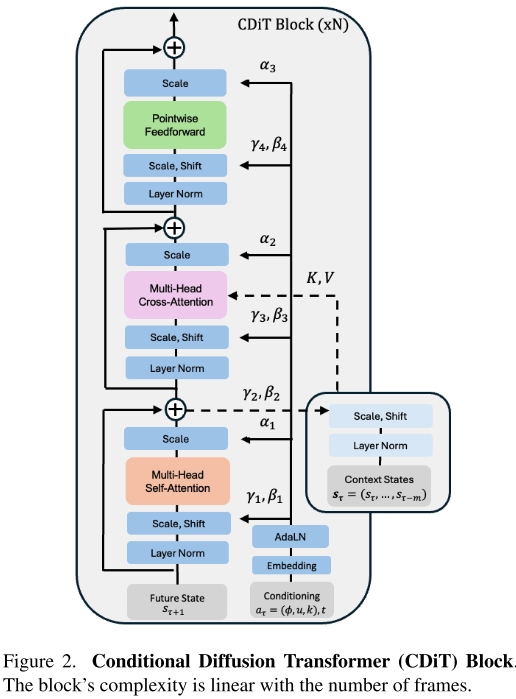
1. Conditional Diffusion Transformer (CDiT)
研究团队设计了一种新的神经网络架构CDiT,相比传统的Diffusion Transformer (DiT)有显著优势:
- 线性复杂度: CDiT的计算复杂度相对于上下文长度是线性的,而DiT是二次的
- 效率提升: 需要的计算量(FLOPs)比标准DiT少4倍
- 更好性能: 在相同参数量下,CDiT的预测准确性更高
2. 大规模多模态训练
NWM在多样化的数据上进行训练:
- 机器人数据集: SCAND(社交导航)、TartanDrive(越野驾驶)、RECON(开放世界导航)、HuRoN(社交交互)
- 人类视频: Ego4D无标签视频数据
- 规模: 扩展到10亿参数,是目前最大的导航专用模型之一
3. 时空动态建模
NWM不仅能预测空间变化,还能控制时间动态:
- 时间偏移: 可以预测未来±16秒内的场景
- 动作累积: 将多个时间步的动作进行累积,更准确地模拟长期行为
- 自然反事实: 通过数据中的自然变化学习因果关系
工作原理详解
1. 训练阶段
输入: 过去的图像帧 + 导航动作(前进/后退、左右移动、旋转角度)
输出: 预测的未来图像帧
模型学习从当前状态和动作预测下一个状态的映射关系,就像学习"如果我向前走2米并右转30度,我会看到什么画面"。
2. 规划阶段
当需要规划路径时,NWM会:
- 生成候选动作: 使用交叉熵方法生成多个可能的动作序列
- 模拟执行: 对每个动作序列,使用世界模型预测会看到的画面
- 评估结果: 计算最终画面与目标的相似度
- 选择最优: 选择能最好到达目标且满足约束的路径
3. 约束处理
NWM支持多种约束类型:
- 动作约束: "前5步只能直行"
- 状态约束: "不能靠近悬崖边缘"
- 时序约束: "先右转,再前进"
实验结果与性能表现
独立导航规划
在RECON数据集上的测试结果显示,NWM作为独立导航系统表现优异:
- 绝对轨迹误差(ATE): 1.13 ± 0.02(越小越好)
- 相对位姿误差(RPE): 0.35 ± 0.01(越小越好)
- 对比: 显著优于GNM (ATE: 1.87) 和NoMaD (ATE: 1.93)
轨迹排序增强
NWM还可以作为现有导航系统的"智能顾问":
- 方法: 让NoMaD生成多个候选路径,NWM评估并选择最佳路径
- 结果: 使用32个候选路径时,ATE降至1.78±0.03
- 提升: 相比单独使用NoMaD提升约8%
视频生成质量
NWM生成的视频质量远超现有方法:
- FVD分数: 200.969 vs DIAMOND的762.734(越小越好)
- 视觉质量: 生成的导航视频更加逼真和连贯
- 时序一致性: 长时间预测中保持较好的时间一致性
约束规划能力
研究团队测试了多种约束条件:
- 前进优先: 前5步只能前进,然后允许转向
- 左右优先: 前3步只能转向,然后前进
- 直行-前进: 先直行3步,再前进
结果显示NWM能有效满足所有约束,同时保持较高的导航性能。
未知环境适应
通过在Ego4D无标签数据上训练,NWM在未见过的环境中表现更好:
- Go Stanford数据集: LPIPS从0.658降至0.652(越小越好)
- 泛化能力: 能够在新环境中进行合理的路径想象
技术优势与特点
1. 计算效率
CDiT架构的线性复杂度使得NWM能够:
- 长上下文: 处理更长的历史观察序列
- 实时性: 在有限计算资源下实现实时规划
- 可扩展: 随着模型规模增长保持合理的计算成本
2. 灵活性
相比传统导航系统,NWM提供了前所未有的灵活性:
- 动态约束: 运行时添加新约束无需重训练
- 多目标: 同时考虑多个导航目标和限制条件
- 适应性: 根据环境复杂度自动调整规划深度
3. 可解释性
NWM的规划过程具有天然的可解释性:
- 视觉预测: 直接显示预期看到的画面
- 路径对比: 可视化比较不同路径的预期结果
- 约束验证: 直观展示约束是否得到满足
应用场景与前景
immediate应用
- 服务机器人: 在办公室、医院、商场等复杂环境中导航
- 自动驾驶: 在城市环境中进行路径规划和决策
- 无人机: 在复杂三维环境中的自主导航
长期影响
- 具身人工智能: 为下一代具身AI系统提供基础能力
- 人机协作: 让机器人更好地理解和预测环境变化
- 多模态学习: 推动视觉-动作-语言的统一建模
局限性与未来方向
当前局限
- 模式坍塌: 在分布外数据上可能生成过于相似的预测
- 时序动态: 对行人运动等复杂时序动态建模还需改进
- 自由度限制: 目前只支持3自由度导航,6自由度和机械臂控制有待扩展
未来发展
- 更长上下文: 支持更长的历史和未来预测窗口
- 多模态融合: 整合语言指令、触觉反馈等多模态信息
- 自监督学习: 减少对标注数据的依赖,提高泛化能力
结论
Navigation World Models代表了机器人导航领域的一个重要里程碑。通过赋予机器人"想象"未来的能力,NWM不仅提高了导航性能,更重要的是提供了一个更加灵活、可解释和适应性强的导航框架。
这项研究的意义不仅在于技术创新,更在于它展示了一条通向真正智能导航的路径:让机器人像人类一样思考和规划。随着技术的进一步发展,我们有理由相信,未来的机器人将具备更强的环境理解和适应能力,真正实现与人类的和谐共存。
从更广阔的视角来看,NWM的成功证明了世界模型在具身AI中的巨大潜力。正如人类通过内在的世界模型理解和预测环境变化一样,机器人也需要这样的能力才能在复杂多变的现实世界中自主行动。Navigation World Models为实现这一愿景迈出了坚实的一步。