【嵌入式电机控制#进阶7】V/F强拖启动
一、V/F启动原理
这种算法一般用于解决三步启动中的外同步加速启动问题。
下面的内容节选自陈伯时老师的《电拖自控》教材。
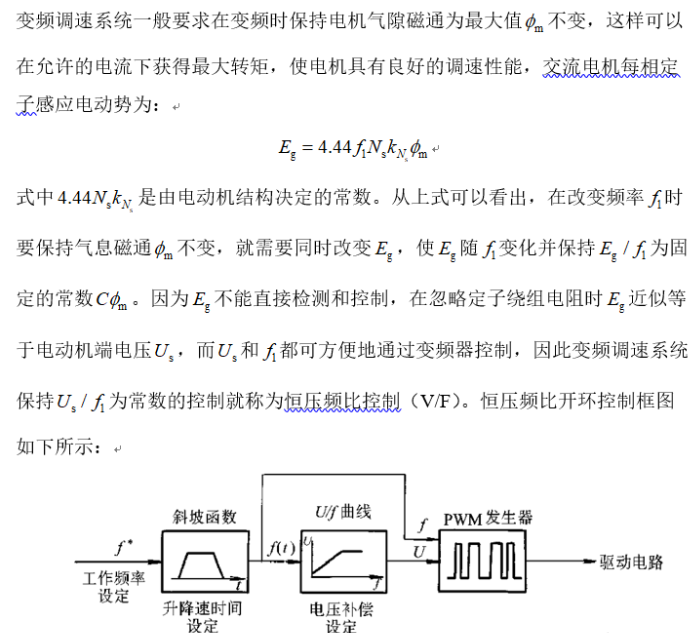
对于永磁同步电机的VF控制方法与上面所讲的类似,没有任何物理量的反馈,动态性能差,如果负载突变可能会产生失步和震荡问题,但是它算法简单,所以在低成本、对转速精度要求不高的无感中被广为使用。
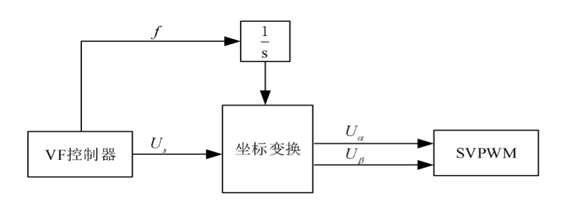
在PMSM控制中,VF强拖控制的逻辑如下图。
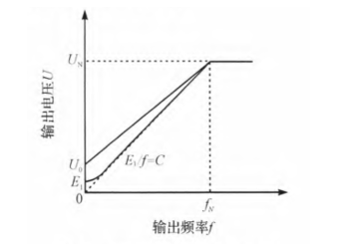
(1)VF控制器:一个斜坡函数,使f和Us都同比增加
(2)积分环节1/s:对霍尔频率换为电角速度积分后得到电角度
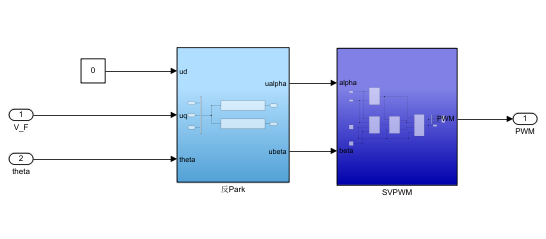
(3)坐标变换:Clark和Park
(4)SVPWM:矢量输出
二、控制系统仿真
SVPWM开关管频率 Ts = 1e-4 Hz;
电机定子电阻 Rs = 0.53 Ω;
电机定子电感 Ld = 3.7e-5 H;
Lq = 3.7e-5 H;
电机极对数 Pn = 7;
电机磁链 Flux = 4.73e-4 Wb;
电机转动惯量 J = 1.95e-7 Kg·m2;
电机直流电压 Vdc = 12 V;
电机额定转速 N = 12540 rpm;
电机额定频率 Fn = 1463 Hz;
1. 控制器部分
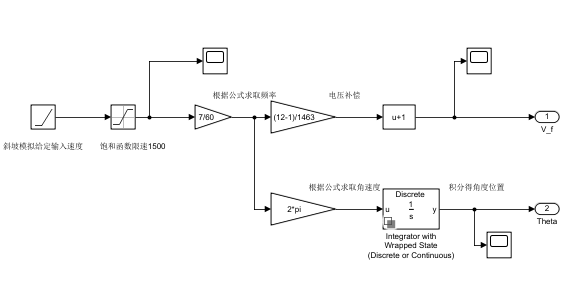
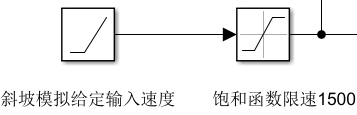
(1)输入
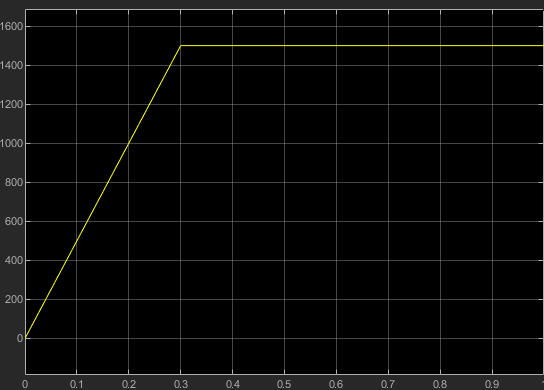
给一个斜坡速度输入,斜率5000,并且后置限速1500
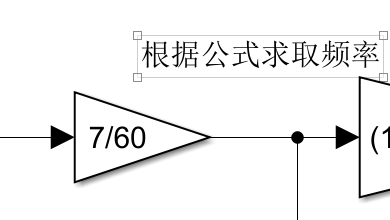
(2) 根据转速换算为圈频率(注意,这里没用霍尔频率,但道理是一样的)
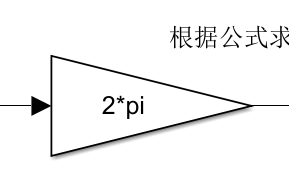
(3)换算为电角速度
你VF中的F是磁圈频率就乘2 * pi,如果是霍尔频率就乘 pi / 3
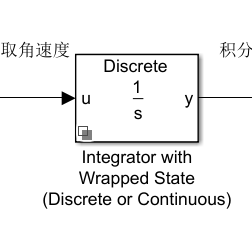
(4)离散积分环节
相当于周期为系数的累加,积分后就是电角度
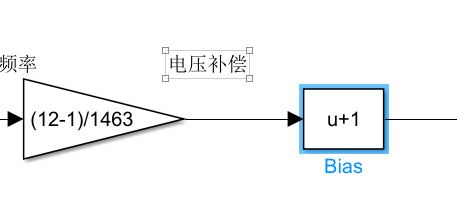
(5)电压补偿量计算
开头说了,输入中高频时VF曲线线性程度较强
但在低频会出现定子电流和漏感造成的非线性现象,所以我们需要在启动时进行人为补偿。
若电机空载启动,定子电流等于空载电流

若电机带载启动,
计算定子压降和漏感压降:
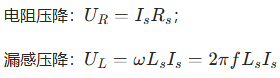
进行电压补偿:

我们这里取补偿总量为1V:
这样,控制算法部分就搭建完毕了!
2. 坐标变换和SVPWM(不详细说了)
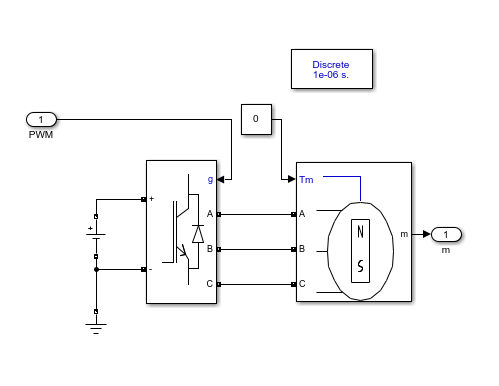
3. 逆变电路和PMSM
4. 实验结果
(1)电压输入曲线和电压补偿曲线
电压输入曲线
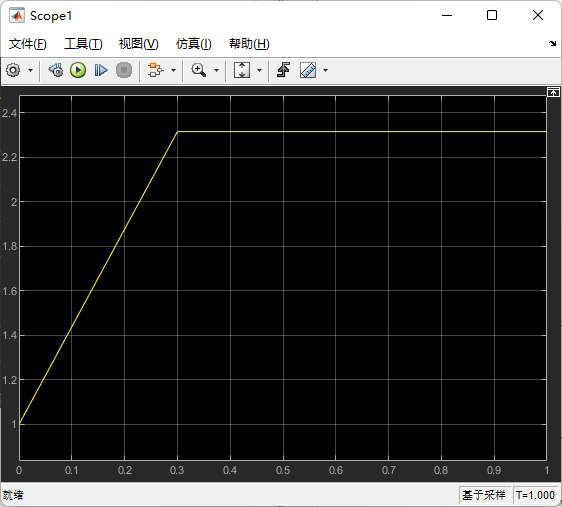
电压补偿曲线
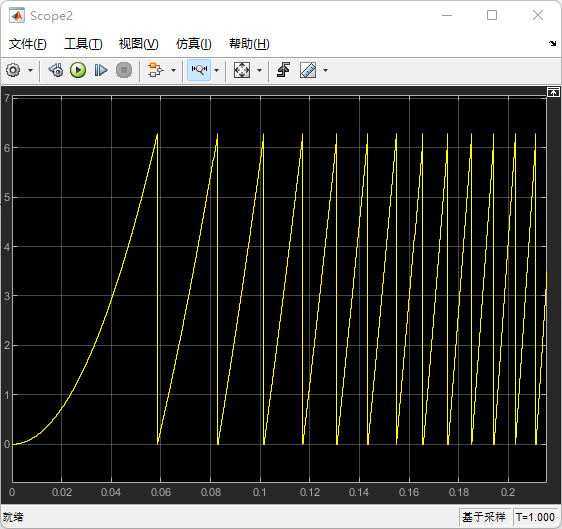
(2)电角度输入
可以很明显看到,电角度曲线逐渐在变窄,说明换相加速了
(3)相电流曲线
可以看到,幅值和频率都在升高,很完美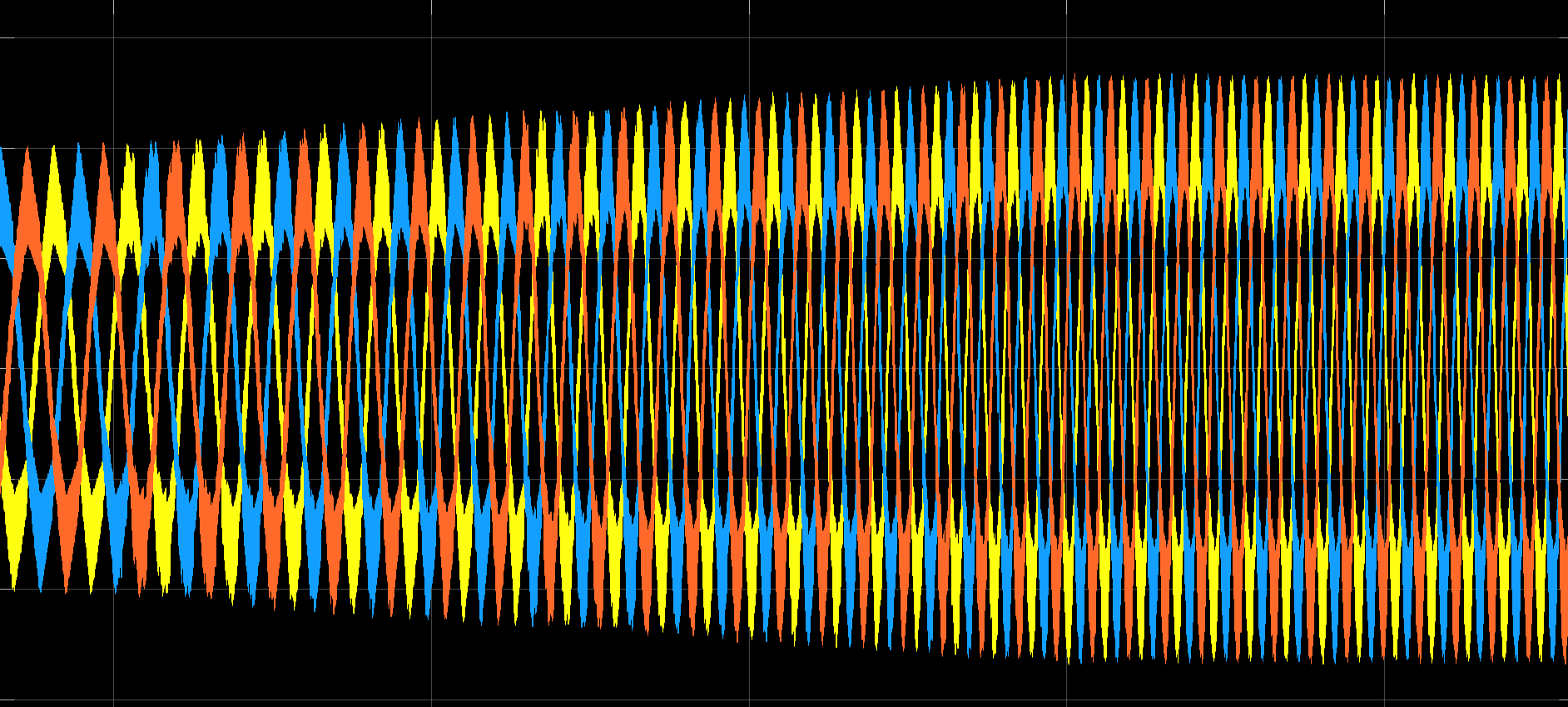
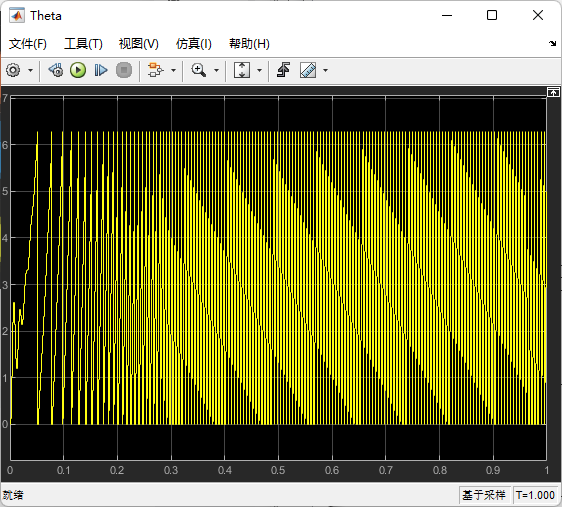
(4)电机电角度输出曲线
可以看到,虽然刚开始有些震荡,但很快就趋于正常
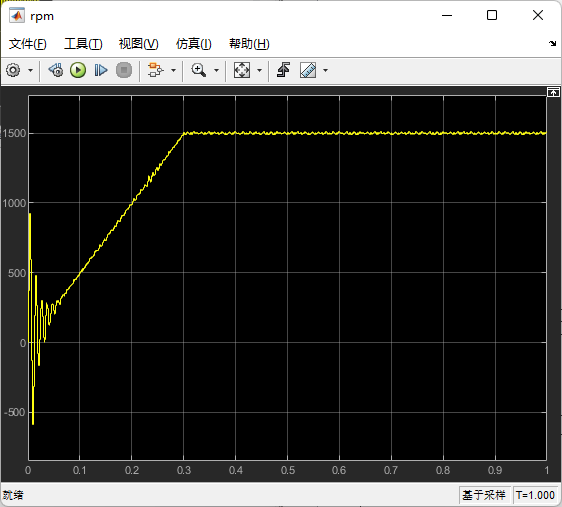
(5)转速响应曲线
刚开始有高频震荡,随后跟随曲线
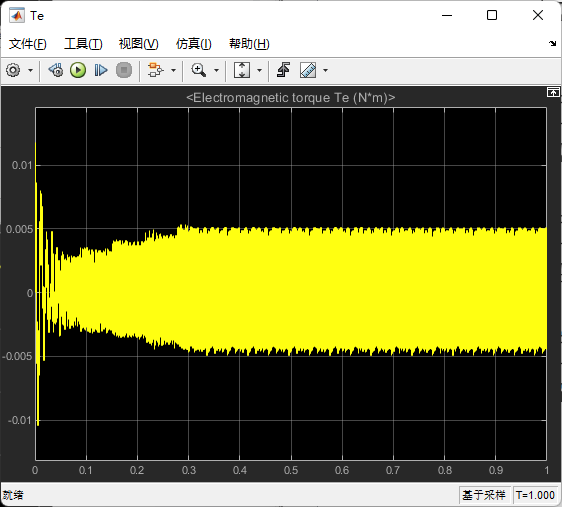
(6)转矩响应曲线
启动时转矩较大,因为电机需要加速,随后电机转速平稳,电流趋于稳定