在windows上使用ROS2 kilted
文章目录
- 一.基础配置
-
- 1.1 解除路径长度限制
- 1.2 安装pixi
- 二.ROS2在windows下的安装
-
- 2.1 ROS2的安装
- 2.2 ROS2测试
- 三.ROS2 windows下的python和c++开发环境搭建测试
-
- 3.1 ROS2 工作空间创建
- 3.2 创建Python包
- 3.3 ROS2 C++包的创建
- 3.4 在VSCODE中编译C++节点
- 四. Windows上使用ROS2的命令行简化:
-
- 4.1 激活交互式环境
- 4.2 进行编译,不需要带前面的pixi run 了
- 4.3 source 环境,同Ubuntu的source local_setup.bash。
- 4.4 运行节点,也不需要带前面的pixi run 了
- 五. 在VS2022的使用cmake的项目中使用ROS2
-
- 5.1 增加python相关的环境变量
- 5.2 rosidl_typesupport_c的报错
- 5.3 ROS2 节点创建 InvalidNodeNameError 错误
一.基础配置
1.1 解除路径长度限制
以管理员方式启动powershell,执行如下指令:
New-ItemProperty -Path "HKLM:\SYSTEM\CurrentControlSet\Control\FileSystem" -Name "LongPathsEnabled" -Value 1 -PropertyType DWORD -Force
1.2 安装pixi
pixi是一个包管理工具,功能很强大,新版本的ROS2支持。
在网页https://pixi.sh/latest/ ,按照教程进行安装。
二.ROS2在windows下的安装
2.1 ROS2的安装
接下来的教程参考:
https://docs.ros.org/en/kilted/Installation/Windows-Install-Binary.html
Kilted版本和rolling版本可以使用pixi进行依赖管理,在windows11版本上测试通过,使用上会方便一点。
首先安装pixi,在网页https://pixi.sh/latest/ ,按照教程进行安装。
安装完成pixi后重启命令行窗口,依次执行:
cd C:\pixi_ws #注意:安装路径不可更改
irm https://raw.githubusercontent.com/ros2/ros2/refs/heads/kilted/pixi.toml -OutFile pixi.toml
pixi install
可以安装好ROS2需要的依赖。
注意C:\pixi_ws的路径不可更改。
然后下载ROS2在windows下的二进制预编译包。
https://github.com/ros2/ros2/releases
下载后解压到 C:\pixi_ws\ros2-windows 路径。
安装完成后的目录结构如下图所示:

2.2 ROS2测试
打开cmd,不要使用powershell,依次执行如下指令:
cd C:\pixi_ws
pixi shell
C:\pixi_ws\ros2-windows\local_setup.bat
ros2 run demo_nodes_cpp talker
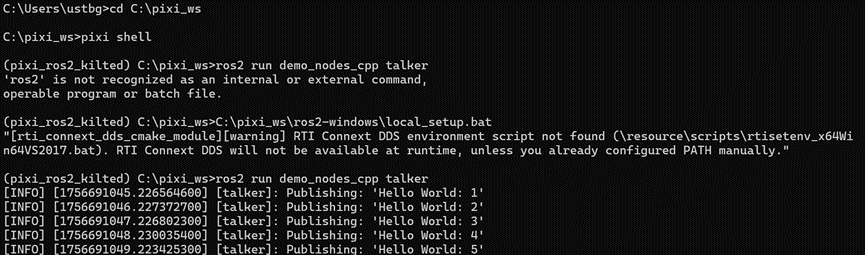
一定要先执行local_setup.bat才能执行ros2的指令。
打开另一个终端cmd,依次执行如下指令:
cd C:\pixi_ws
pixi shell
pixi shell --manifest-path c:/pixi_ws/pixi.tomlC:\pixi_ws\ros2-windows\local_setup.batros2 run demo_nodes_py listener
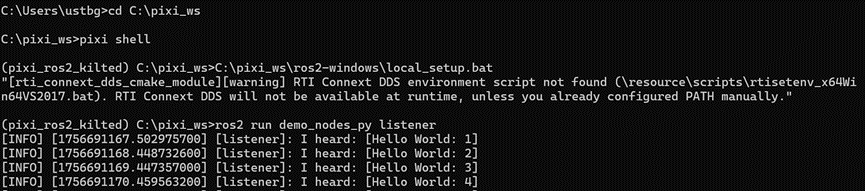
说明ROS2的环境搭建完成。
三.ROS2 windows下的python和c++开发环境搭建测试
3.1 ROS2 工作空间创建
接下来的教程参考网页:
https://pixi.sh/latest/tutorials/ros2/
切换到e盘,执行
pixi init my_ros2_project -c robostack-humble -c conda-forge
如下图所示:

在E:\ROS2目录下创建了一个工作空间,目录结构如下:
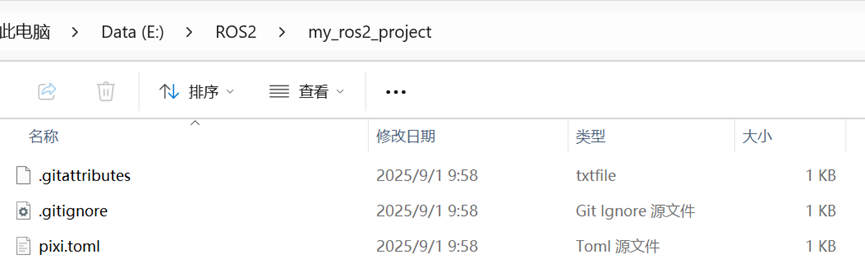
接下来可以创建python包或者c++包。
3.2 创建Python包
进入创建的工作目录,
cd my_ros2_project
执行如下指令,创建python包:
pixi run ros2 pkg create --build-type ament_python --destination-directory src --node-name my_node my_package
如下图所示:
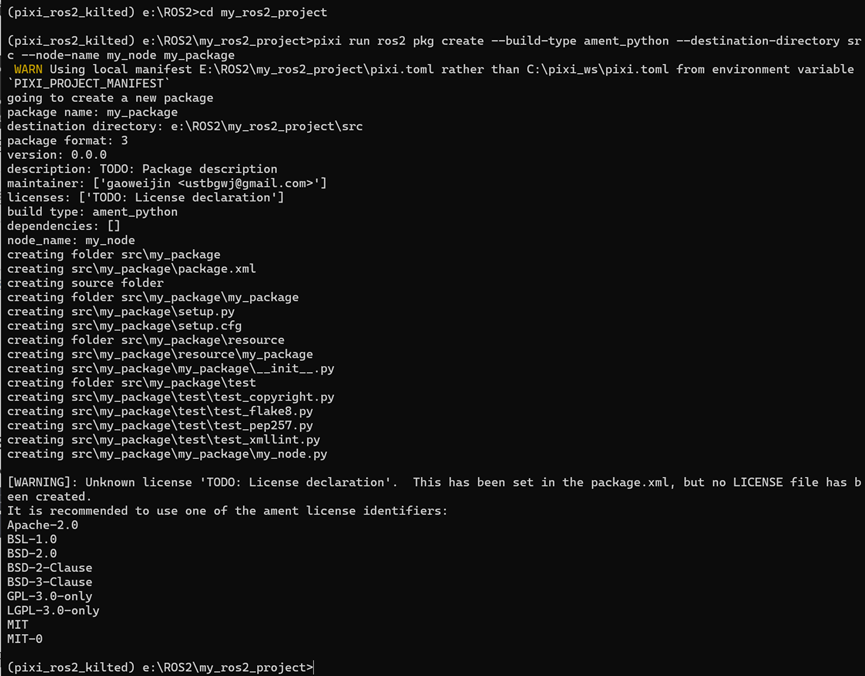
成功创建了一个python包,目录结构如下:

添加依赖,执行如下指令(好像不执行也可以编译)
pixi add colcon-common-extensions "setuptools<=58.2.0"
进行python包的编译
pixi run colcon build
完成编译

在运行python包前,需要执行setup下的local_setup.bat文件,类似ubuntu系统下的source。可以执行:
call install/setup.bat
如果使用pixi的话,可以将如下内容加入pixi.toml,在激活环境时自动执行。
[activation]
scripts = [