OpenCV 实战:图像模板匹配与旋转处理实现教程
目录
一、功能概述:代码能做什么?
二、环境准备:先搭好运行基础
1. 安装 Python
2. 安装 OpenCV 库
3. 准备图像文件
三、代码逐段解析:从基础到核心
1. 导入 OpenCV 库
2. 读取图像文件
3. 模板图像旋转:处理多角度匹配
4. 获取模板尺寸:为标记匹配区域做准备
5. 模板匹配:核心算法执行
函数参数解析:
返回值res:
6. 提取最优匹配位置
7. 绘制匹配框并保存结果
8. 显示结果并释放资源
四、关键优化:让匹配更精准、更通用
1. 遍历所有旋转角度的模板
2. 设定相似度阈值,过滤误检
3. 处理灰度图像,提高效率
五、常见问题与解决方案
六、总结与拓展
拓展学习方向:
在计算机视觉领域,模板匹配是一项基础且实用的技术,它能够在一幅大图像中快速定位与模板图像相似的区域。本文将基于一段完整的 OpenCV 代码,详细讲解如何实现带旋转处理的模板匹配,帮助新手快速掌握核心思路与实操技巧。
一、功能概述:代码能做什么?
先明确这段代码的核心作用:
- 读取原始图像(image.jpg)和模板图像(template.jpg);
- 将模板图像顺时针旋转 3 次(每次 90°),得到 0°、90°、180°、270° 四种角度的模板;
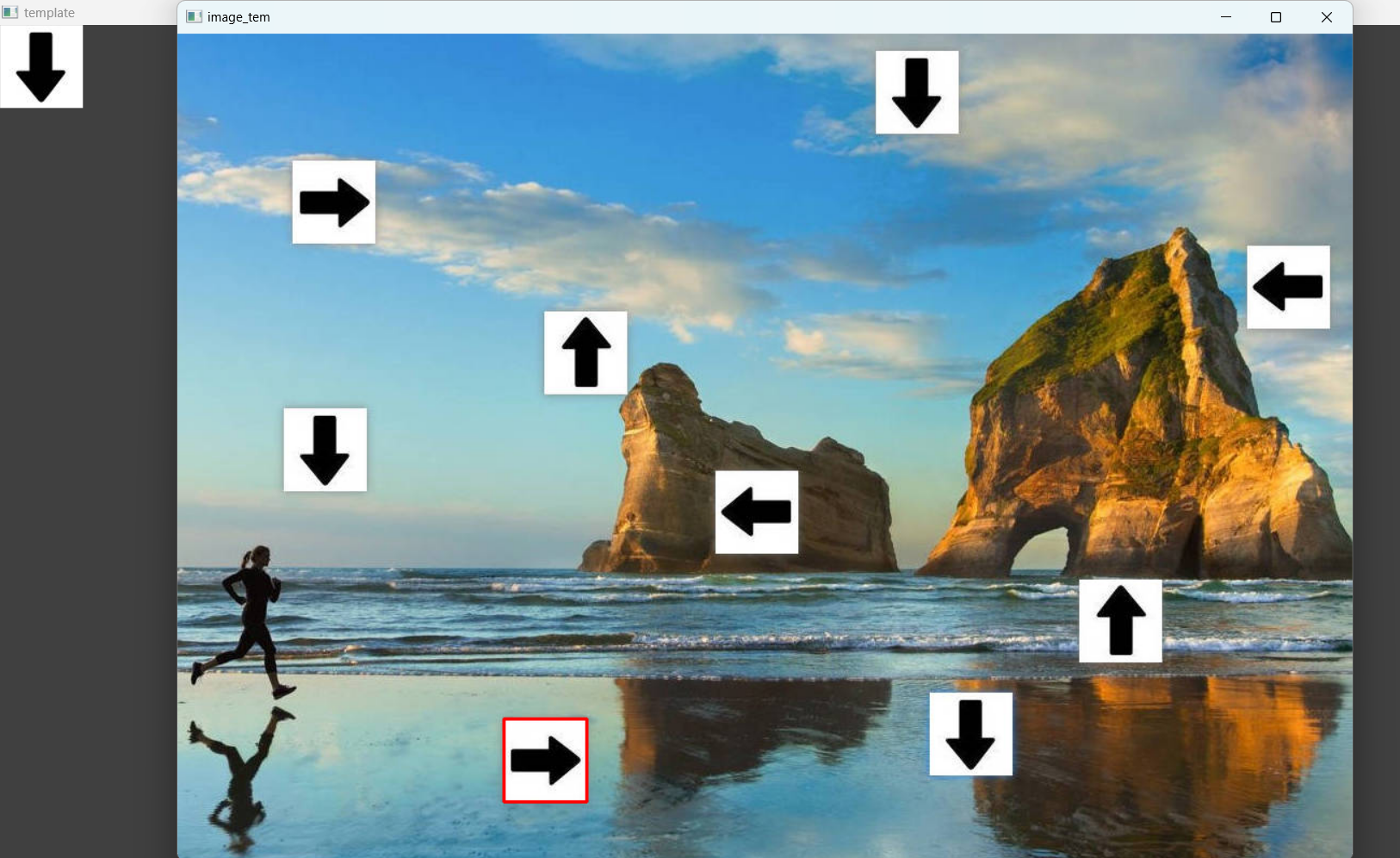
- 以旋转 270° 的模板为例,在原始图像中匹配相似区域;
- 用红色矩形框标记匹配到的区域,保存结果并显示窗口;
- 支持按任意键关闭窗口,释放资源。
二、环境准备:先搭好运行基础
在执行代码前,需要确保你的开发环境已配置好相关依赖,步骤如下:
1. 安装 Python
推荐使用 Python 3.7~3.11 版本(OpenCV 对新版本 Python 兼容性更稳定),可从Python 官网下载安装,记得勾选 “Add Python to PATH”。
2. 安装 OpenCV 库
打开命令行(Windows 用 CMD 或 PowerShell,Mac/Linux 用终端),执行以下命令:
pip install opencv-python # 核心库,约80MB# 若需要额外功能(如视频处理),可安装完整版:pip install opencv-contrib-python3. 准备图像文件
将原始图像命名为image.jpg、模板图像命名为template.jpg,并与你的 Python 代码文件放在同一文件夹中(避免路径错误)。
- 建议原始图像尺寸大于模板图像(否则无法匹配);
- 模板图像尽量选择 “特征明显” 的区域(如特定 logo、物体边缘),减少干扰。
三、代码逐段解析:从基础到核心
接下来逐行拆解代码,理解每一步的作用和背后的逻辑。
1. 导入 OpenCV 库
import cv2这是所有 OpenCV 代码的起点,cv2是 OpenCV 在 Python 中的库名,导入后才能调用其提供的图像读取、旋转、匹配等函数。
2. 读取图像文件
image = cv2.imread('image.jpg')template = cv2.imread('template.jpg')
cv2.imshow('template',template)
cv2.waitKey(0)- cv2.imread(path):核心函数,用于读取图像文件,返回numpy.ndarray类型的图像矩阵(像素值存储在矩阵中)。
- 注意:OpenCV 读取图像时,默认以BGR 格式(蓝、绿、红)存储,而 Python 其他图像库(如 PIL)通常用 RGB 格式,若后续需跨库处理需注意格式转换。
- 常见问题:若变量为None,说明图像读取失败,需检查文件路径是否正确、文件是否损坏(如后缀名是否真为.jpg)。
3. 模板图像旋转:处理多角度匹配
template_90_1 = cv2.rotate(template, cv2.ROTATE_90_CLOCKWISE) # 顺时针旋转90°template_90_2 = cv2.rotate(template_90_1, cv2.ROTATE_90_CLOCKWISE) # 再转90°(共180°)template_90_3 = cv2.rotate(template_90_2, cv2.ROTATE_90_CLOCKWISE) # 再转90°(共270°)- cv2.rotate(src, rotateCode):专门用于图像旋转的函数,无需手动计算旋转矩阵,简洁高效。
- 旋转参数说明:
-
- cv2.ROTATE_90_CLOCKWISE:顺时针旋转 90°;
-
- cv2.ROTATE_90_COUNTERCLOCKWISE:逆时针旋转 90°;
-
- cv2.ROTATE_180:直接旋转 180°(等价于两次顺时针 90°)。
- 为什么要旋转模板?
实际场景中,模板可能在原始图像中呈现不同角度(如 logo 倾斜),仅用原始模板会匹配失败,因此需要生成多角度模板覆盖更多情况。
4. 获取模板尺寸:为标记匹配区域做准备
h, w = template_90_3.shape[:2]- image.shape:返回图像的尺寸信息,格式为(高度, 宽度, 通道数)(如(480, 640, 3)表示 480 行、640 列的 3 通道彩色图)。
- shape[:2]:取前两个值(高度h和宽度w),因为后续绘制矩形需要知道模板的大小 —— 匹配区域的 “左上角坐标” 加上模板的 “宽高”,才能得到 “右下角坐标”。
5. 模板匹配:核心算法执行
res = cv2.matchTemplate(image, template_90_3, cv2.TM_CCORR_NORMED)这是整个代码的核心步骤,负责在原始图像中搜索与模板最相似的区域。
函数参数解析:
- image:原始图像(需大于模板图像);
- template_90_3:待匹配的模板图像(此处用旋转 270° 的模板);
- cv2.TM_CCORR_NORMED:匹配算法类型(归一化相关系数匹配),常用算法对比见下表:
| 算法类型 | 特点 | 适用场景 |
| cv2.TM_SQDIFF | 平方差匹配,值越小越相似 | 无噪声、高相似度场景 |
| cv2.TM_CCORR | 相关匹配,值越大越相似 | 亮度一致的场景 |
| cv2.TM_CCORR_NORMED | 归一化相关匹配,值越接近 1 越相似 | 亮度变化大的场景(推荐) |
| cv2.TM_CCOEFF | 相关系数匹配,值越接近 1 越相似 | 整体对比度差异大的场景 |
返回值res:
res是一个 “匹配结果矩阵”,其尺寸为(image_h - template_h + 1, image_w - template_w + 1),每个元素代表 “以该点为左上角时,模板与原始图像区域的相似度”。
6. 提取最优匹配位置
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(res)top_left = max_locbottom_right = (top_left[0] + w, top_left[1] + h)- cv2.minMaxLoc(res):从匹配结果矩阵res中提取 4 个关键值:
-
- min_val:最小相似度值;
-
- max_val:最大相似度值(对TM_CCORR_NORMED算法,越接近 1 越好);
-
- min_loc:最小相似度对应的坐标(左上角);
-
- max_loc:最大相似度对应的坐标(左上角)。
- 因为用了TM_CCORR_NORMED算法(值越大越相似),所以取max_loc作为匹配区域的 “左上角坐标”;
- 右下角坐标 = 左上角坐标 + 模板宽高(w和h),这样就能确定矩形框的范围。
7. 绘制匹配框并保存结果
image_tem = cv2.rectangle(image, top_left, bottom_right, (0, 0, 255), thickness=2)cv2.imwrite('result.png', image_tem)- cv2.rectangle(img, pt1, pt2, color, thickness):在图像上绘制矩形框:
-
- img:要绘制的图像(此处直接修改原始图像,也可先复制避免破坏原图);
-
- pt1:矩形左上角坐标(top_left);
-
- pt2:矩形右下角坐标(bottom_right);
-
- color:矩形颜色(BGR 格式,(0,0,255)表示红色);
-
- thickness:矩形线条粗细(-1表示填充矩形)。
- cv2.imwrite(path, img):将处理后的图像保存到指定路径(此处保存为result.png,支持jpg/png等格式)。
8. 显示结果并释放资源
cv2.imshow('image_tem', image_tem)cv2.waitKey(0)cv2.destroyAllWindows()- cv2.imshow(window_name, img):创建一个窗口,显示指定图像(窗口名image_tem,图像image_tem);
- cv2.waitKey(0):等待用户按键,0表示 “无限等待”(直到按任意键),若传入数字(如1000)表示等待 1000 毫秒后自动关闭;
- cv2.destroyAllWindows():关闭所有 OpenCV 创建的窗口,释放内存资源(避免程序退出后窗口残留)。
四、关键优化:让匹配更精准、更通用
原始代码仅用了 270° 的模板进行匹配,实际应用中可能存在漏检或误检,以下是几个重要优化方向:
1. 遍历所有旋转角度的模板
若要匹配任意角度的模板,可循环遍历 4 个旋转角度(0°、90°、180°、270°),并记录每个模板的最优匹配结果:
# 定义所有旋转模板(包含原始模板)templates = [template, # 0°(原始)cv2.rotate(template, cv2.ROTATE_90_CLOCKWISE), # 90°cv2.rotate(template, cv2.ROTATE_180), # 180°cv2.rotate(template, cv2.ROTATE_90_COUNTERCLOCKWISE) # 270°]best_val = 0 # 记录最大相似度best_rect = None # 记录最优匹配矩形for temp in templates:h, w = temp.shape[:2]res = cv2.matchTemplate(image, temp, cv2.TM_CCORR_NORMED)_, max_val, _, max_loc = cv2.minMaxLoc(res)# 保留相似度最高的匹配if max_val > best_val:best_val = max_valtop_left = max_locbest_rect = (top_left[0], top_left[1], top_left[0]+w, top_left[1]+h)# 绘制最优匹配框if best_rect:cv2.rectangle(image, (best_rect[0], best_rect[1]), (best_rect[2], best_rect[3]), (0,0,255), 2)2. 设定相似度阈值,过滤误检
若原始图像中没有与模板相似的区域,代码仍会标记 “相对最像” 的区域(导致误检),可通过设定阈值解决:
threshold = 0.8 # 相似度阈值(根据实际场景调整,0~1之间)if max_val > threshold:# 绘制矩形框(匹配成功)cv2.rectangle(image, top_left, bottom_right, (0,0,255), 2)else:print("未找到匹配区域(相似度:{:.2f} < 阈值:{:.2f})".format(max_val, threshold))3. 处理灰度图像,提高效率
彩色图像有 3 个通道,匹配时计算量较大,可将图像转为灰度图减少计算:
# 转为灰度图image_gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)template_gray = cv2.cvtColor(template, cv2.COLOR_BGR2GRAY)# 后续匹配用灰度图res = cv2.matchTemplate(image_gray, template_gray, cv2.TM_CCORR_NORMED)五、常见问题与解决方案
在实际运行代码时,可能会遇到以下问题,这里提供对应的解决思路:
| 问题现象 | 可能原因 | 解决方案 |
| 图像读取后为None | 路径错误、文件损坏、后缀名错误 | 1. 用绝对路径(如C:/images/image.jpg);2. 检查文件是否能正常打开;3. 确认后缀名与实际格式一致(如.jpeg≠.jpg) |
| 匹配结果矩阵res为空 | 原始图像尺寸小于模板图像 | 更换更大的原始图像,或缩小模板图像 |
| 标记的矩形框位置偏移 | 模板旋转后尺寸获取错误,或算法选择不当 | 1. 确保旋转后重新获取h, w(如h, w = temp.shape[:2]);2. 换用TM_CCOEFF_NORMED算法尝试 |
| 窗口闪退 | 缺少cv2.waitKey(0)或cv2.destroyAllWindows() | 确保两行代码都存在,且waitKey(0)在imshow之后 |
六、总结与拓展
本文通过一段完整代码,讲解了 OpenCV 模板匹配的核心流程,包括图像读取、旋转处理、匹配算法、结果可视化等关键步骤,并提供了优化方向和问题解决方案。
拓展学习方向:
- 多尺度模板匹配:若模板在原始图像中大小不确定(如远处的物体更小),可缩放模板生成多尺度版本,再进行匹配;
- 非刚性模板匹配:对于形变的模板(如弯曲的文字),可学习cv2.findTransformECC等进阶函数;
- 结合深度学习:对于复杂场景(如遮挡、模糊),可使用 YOLO、SSD 等目标检测模型,精度远超传统模板匹配。