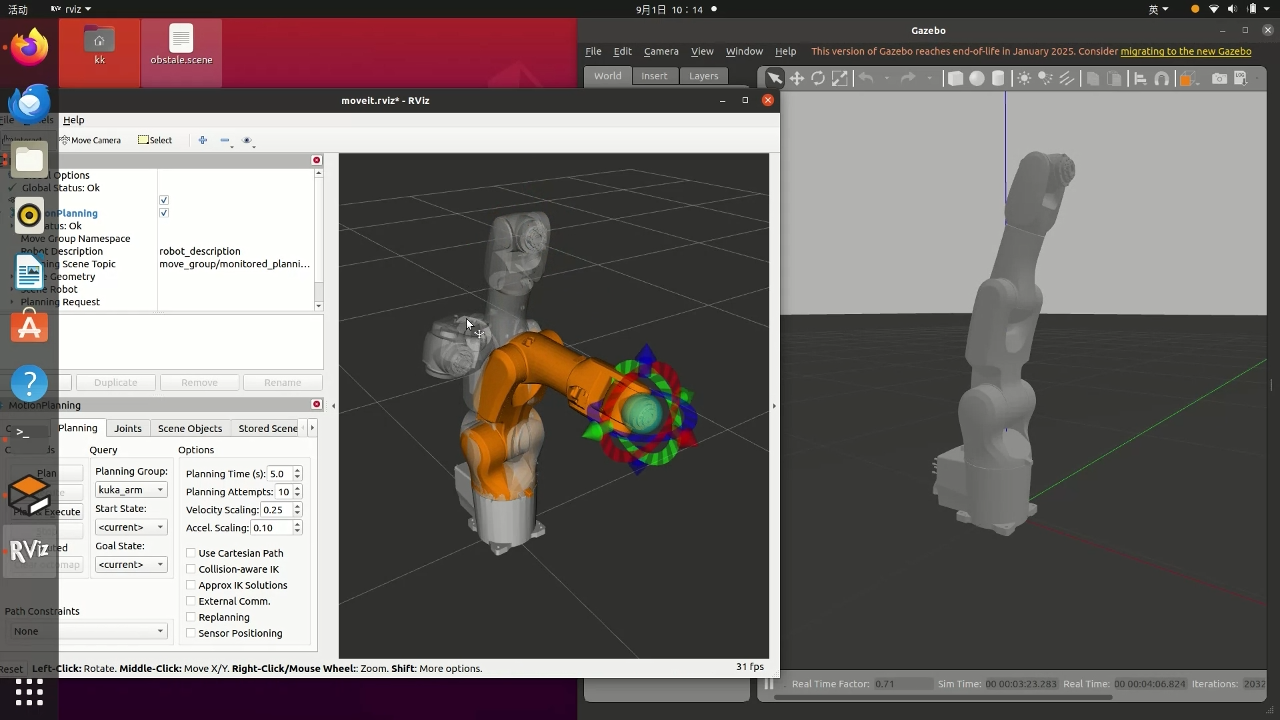
Rviz-Gazebo联动
原理:Rviz通过一个叫做joint_state_publisher的节点发布机械臂达到的关节角度(目标位置),而Gazebo中的机械臂则通过一个“控制器”接收这些目标,并驱动仿真环境中的关节运动,同时将仿真中的实际关节状态反馈回ROS系统,Rviz再根据这个反馈状态进行显示。
rviz 并不直接控制 Gazebo 中的机械臂。它们两者都是通过一个共同的“中间人”——ROS——来进行通信和联动的。
整个控制流程可以概括为:
运动规划节点 (MoveIt!) → ROS Topic/Service → Gazebo 控制器插件 → Gazebo 物理引擎