凸集与优化
什么是凸集
要理解凸集(Convex Set),我们需要从 “凸性” 的核心直觉出发,逐步过渡到数学定义、关键性质和实际应用 —— 它是优化理论、几何、概率统计等领域的基础概念,本质是描述集合中 “任意两点的连线都完全落在集合内” 的特性。
凸组合的定义
凸集的定义依赖 “凸组合(Convex Combination)” 这一概念,我们先明确它,再定义凸集。
基础:凸组合(针对 2 个点)
设两个点 x_1 和 x_2位于 n 维欧几里得空间Rn 中(比如 1 维直线、2 维平面、3 维空间),若存在一个实数λ∈ [0,1](即 (0≤λ≤1),则点:x= λx_1 + (1-λ)x_2——称为x_1 和 x_2 的凸组合。
直觉解释:当 λ 从 0 变到 1 时,x 从 x_2 连续移动到 x_1,轨迹就是连接 x_1和 x_2 的整条线段。
凸集的严格定义
一个集合 S⊆Rn 是凸集,当且仅当:
对任意两个点x_1∈S,x_2∈S以及任意λ∈[0,1],它们的凸组合 λx_1+(1-λ)x_2仍属于S
换句话说:集合中任意两点的连线(所有凸组合)都完全包含在集合内。
凸包(多个点的凸组合)
凸集的定义可以推广到 “任意有限个点”:若 S 是凸集,则对 S 中任意 k 个点x_1 ,x_2,…,x_k,以及满足λ_1+λ_2+…+λ_k=1,且λ_i≥0(i=1,…,k)的实数λ_1,…,λ_k它们的凸组合:x=λ_1x_1+λ_2x_2+……+λ_kx_k仍属于 S。
这意味着:凸集中 “任意多个点的加权平均(权重非负且和为 1)” 都不会超出集合
凸集的核心性质
凸集的性质是其在数学和应用中发挥作用的关键,最核心的是 “封闭性”—— 对凸集进行特定操作后,结果仍为凸集:
交集封闭:任意多个凸集的交集仍是凸集
仿射变换封闭:对凸集进行 “线性变换(如缩放、旋转)+ 平移” 后,结果仍是凸集。
凸包(Convex Hull):任意集合 A⊆ Rn的凸包是 “包含 A 的最小凸集”,本质是 A 中所有点的所有凸组合构成的集合。
什么是凸函数
凸的方向——凸与严格凸
凸函数: 满足定义的基础条件,允许线段上的点与函数图像完全重合(即存在 “平的部分”)。
严格凸函数: 在凸函数的基础上,进一步要求线段严格位于函数图像上方(除端点外无重合),是更强的条件。
凸函数的数学定义
凸函数的定义基于区间内任意两点的线性组合,是理解其本质的核心。我们分 “一元函数” 和 “多元函数”(拓展)两类说明,一元函数是基础
一元凸函数
设函数 f(x)在区间 I(如 [a,b] 或 R上有定义,若对区间内任意两个不同的点 x_1, x_2 ∈ I,以及任意满足0 ≤ λ ≤ 1,都有:f(λx_1+(1−λ)x2)≤λf(x1)+(1−λ)f(x2),则称 f(x)是区间 I 上的凸函数。
- 若将不等式改为 严格小于(<),则 f(x)是严格凸函数
- 符号解释:
- λx_1+(1−λ)x_2:表示 x_1 和 x_2 之间的任意一个点(当 λ=0 时为x_2,λ=1时为x_1,λ=0.5时为中点,记为 x_λ
- λf(x_1)+(1−λ)f(x_2):表示函数在 x_1, x_2 处函数值的线性组合,对应平面上连接(x_1, f(x_1))和 (x_2, f(x_2))的线段上,在 (x_λ) 处的纵坐标。
多元凸函数
若函数 f(x)定义在Rn的凸集 D上(凸集:任意两点连线全在集内,如圆盘、长方体),对任意x_1, x_2 ∈ D 和0 ≤ λ ≤ 1,满足:λf(x_1)+(1−λ)f(x_2)≤λx_1+(1−λ)x_2则称 f(x) 是凸集 D 上的凸函数。
(例如二元函数f(x,y) = x2+ y2)
凸优化
凸优化是数学领域的一个小分支,有着比较完善的理论体系和许多有效的求解算法,在生活当中起诸多作用,例如,在机器学习领域:基于损失函数为凸函数,通过凸优化我们可以寻得最优模型参数,令预测结果与真实值之间的误差最小
要理解凸优化中的无约束优化、等式约束优化、不等式约束优化,首先需要明确凸优化的核心前提:目标函数是凸函数,约束集(若存在)是凸集。这一前提保证了问题的局部最优解就是全局最优解,是凸优化区别于非凸优化的关键优势,也是后续三种约束场景的共同基础。
一、凸优化的基础框架
在展开具体约束类型前,先明确凸优化问题的标准形式(含所有约束类型的通用形式):

其中:
- 凸函数: 满足f(λx_1+(1−λ)x_2)≤λx_1+(1−λ)x_2(∀t∈ [0,1] ,x_1,x_2为定义域内点);
- 凸集: 集合内任意两点的连线仍在集合内(等式约束的仿射子空间、不等式约束的下水平集均为凸集,其交集也是凸集)。
无约束优化(Unconstrained Optimization)
无约束优化是凸优化中最简单的场景 ——没有任何约束条件,仅需最小化凸目标函数。
1. 问题形式
argmin:x∈Rn f(x)
其中 f: Rn→R是凸函数,定义域通常为全空间 Rn(或其他凸集)
2. 核心性质:最优性条件
对于可微的凸函数 f,全局最优解的充要条件是梯度为零(驻点 = 全局最优):
∇f(x∗)=0
原因:凸函数的梯度具有 “单调性”——∀x,y,有f(y)≥f(x) + ∇f(x)T(y-x)。若 ∇f(x*) = 0,则 f(y) ≥ f(x*), 对所有 y 成立:
即x*是全局最优。
3. 经典求解方法
无约束优化的求解核心是 “通过迭代逼近梯度为零的点”,根据是否利用二阶信息(Hessian 矩阵)可分为两类:
| 方法类别 | 代表算法 | 核心思想 | 适用场景 |
|---|---|---|---|
| 一阶方法(仅用梯度) | 梯度下降(GD) | 沿负梯度方向迭代(步长固定或自适应),逐步降低函数值 | 高维问题(如机器学习中的神经网络) |
| 动量法(Momentum) | 引入“动量”加速收敛(缓解 GD 的震荡) | 高维、非光滑目标函数 | |
| Nesterov 加速梯度(AGD) | 引入“前瞻步骤”,比动量法收敛更快(理论收敛速率 (O(1/k2)),GD 为 (O(1/k))) | 凸函数的快速收敛需求 | |
| 二阶方法(用 Hessian) | 牛顿法 | 用 Hessian 矩阵近似函数的二次泰勒展开,一步迭代更精准 | 低维、Hessian 易计算的问题(如逻辑回归) |
| 拟牛顿法(BFGS/L-BFGS) | 用梯度信息迭代逼近 Hessian 的逆(避免直接计算 Hessian,降低复杂度) | 中高维问题(如大规模 SVM) |
等式约束优化(Equality-Constrained Optimization)
当目标函数的最小化需要满足若干等式约束时,需通过 “拉格朗日乘数法” 将约束融入目标函数,转化为无约束问题求解。
1. 问题形式

关键要求:等式约束 (h_i: Rn→R必须是仿射函数(即h_i(x)= a_iT x + b_i),否则约束集(等式的解)可能非凸,不满足凸优化前提。
2. 核心工具:拉格朗日乘数法
通过引入 “拉格朗日乘子” λ_i ∈ R,将等式约束与目标函数合并为拉格朗日函数:

此时,原等式约束问题的最优性等价于拉格朗日函数的无约束驻点(对 x 和 λ 的偏导均为零)。
3. 最优性条件(KKT 条件简化版)
对于可微的凸目标函数和仿射等式约束,x* 是全局最优解的充要条件是:存在λ∗ =(λ_1∗,…,λ_m∗ )T ,满足:
约束可行性: h_i(x*) = 0(满足等式约束);
梯度条件:

不等式约束优化(Inequality-Constrained Optimization)
不等式约束是最贴近实际问题的场景(如 “资源不超过上限”“产量非负”),需通过KKT 条件刻画最优性,并借助 “内点法” 等工具求解。
1. 问题形式

约束集为 “仿射子空间” 与 “凸函数下水平集” 的交集,是凸集。
2. 核心理论:KKT 条件
对于凸优化问题,若满足约束资格(如 Slater 条件:存在严格可行点 x,使得 g_j(x) < 0 且 (h_i(x) = 0)),则 x*是全局最优解的充要条件是:存在拉格朗日乘子λ∗ =(λ_1∗ ,…,λ_m∗)T,和 μ∗ =(μ_1∗ ,…,μ_p∗)T ,满足以下 5 个条件(KKT 条件):
| KKT 条件类别 | 具体形式 | 直观含义 |
|---|---|---|
| 1. 原始可行性 | h_i(x*) = 0 (∀i) ; g_j(x*) ≤ 0 (∀ j) | 最优解必须满足所有约束 |
| 2. 对偶可行性 | μ_j* ≥ 0 (∀ j) | 不等式约束的乘子非负(凸函数的梯度惩罚方向需合理) |
| 3. 互补松弛 | μ_j* g_j(x*) = 0 (∀ j) | 若约束 g_j(x*) < 0 (非活性约束),则 μ* = 0 ;若μ_j* > 0 ,则 g_j(x*) = 0 (活性约束) |
| 4. 梯度条件 |  | 拉格朗日函数对 x 的梯度为零(驻点条件) |
| 5. 约束资格 (Slater) | 存在 x 使得 g_j(x) < 0 (∀ j) 且 h_i(x) =0 (∀ j) | 保证 KKT 条件的充分性(避免 “伪最优解”) |
3. 经典求解方法
不等式约束的核心是 “处理不等式约束的活性 / 非活性状态”,常用方法包括:
(1)内点法(Interior-Point Method)
核心思想:通过 “障碍函数”(如对数障碍函数将不等式约束融入目标函数,构造 “障碍问题”:

其中 t > 0 是 “障碍参数”,t 越小,障碍问题的解越接近原问题的最优解。
适合大规模问题(如线性规划、二次规划),是主流凸优化软件(CVX、Gurobi)的核心算法。
(2)增广拉格朗日法(Augmented Lagrangian Method)
核心思想:在拉格朗日函数中加入 “二次惩罚项”,平衡约束满足度与目标函数最小化:

其中 ρ > 0是惩罚参数,通过迭代调整 ρ、λ、μ,逐步逼近最优解。
常见的近似优化
SGD(Stochastic Gradient Descent,随机梯度下降)
SGD 是最基础的近似优化算法,是批量梯度下降(BGD)的随机版本。
核心思想
在传统的批量梯度下降中,每次迭代需要计算所有样本的梯度(计算成本高,尤其数据量大时):

((f_i(x) 是第 i 个样本的损失函数,N 是总样本数,eta 是学习率)
SGD 的改进:每次迭代仅随机选择 1 个样本(或一小批样本,称为小批量 SGD,Mini-batch SGD)计算梯度,用局部梯度近似全局梯度:

改进:小批量 SGD(Mini-batch SGD)
实际中常用 “小批量”(如 32、64、128 个样本)替代单个样本,平衡效率与稳定性:

(beta是随机选取的小批量样本,B 是批量大小)
Adagrad(Adaptive Gradient,自适应梯度)
Adagrad 针对 SGD 的 “固定学习率” 问题,为每个参数分配自适应的学习率,适合处理稀疏数据(如自然语言、推荐系统)。
核心思想
对每个参数 x_j,累计其历史梯度的平方和:

学习率随历史梯度平方和的平方根衰减(梯度大的参数,学习率衰减更快):

Adam(Adaptive Moment Estimation,自适应动量估计)
Adam 结合了动量法(Momentum) 和RM Sprop(Adagrad 的改进)的优点,是目前深度学习中最常用的优化算法之一。
核心思想
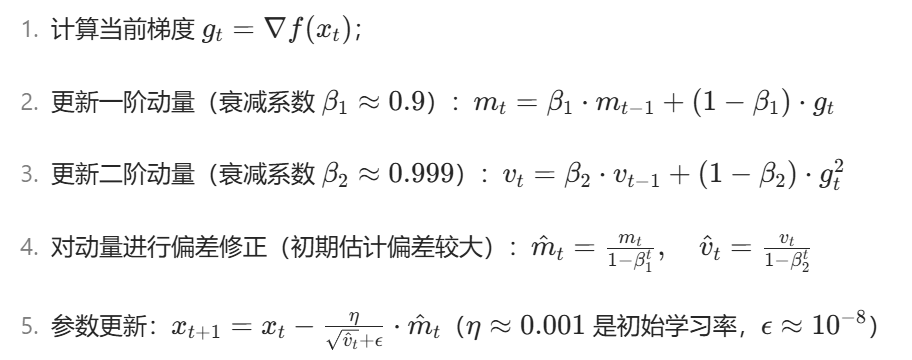
Adam 维护两个状态变量:
一阶动量 m_t: 梯度的指数移动平均(类似动量法,平滑梯度方向);
二阶动量 v_t: 梯度平方的指数移动平均(类似 RMSprop,自适应学习率)。
具体更新公式:
算法对比
| 算法 | 核心特点 | 收敛速度 | 稳定性 | 适用场景 | 典型超参数 |
|---|---|---|---|---|---|
| SGD | 随机梯度,固定学习率 | 慢 | 差 | 小规模数据,简单模型 | 学习率 eta,批量大小 B |
| Adagrad | 累计梯度平方,自适应学习率衰减 | 中 | 中 | 稀疏数据(如文本、推荐) | 初始学习率 eta |
| Adam | 动量 + 自适应二阶动量,偏差修正 | 快 | 好 | 深度学习、大规模数据、非凸问题 | (eta = 0.001, beta_1 = 0.9, beta_2 = 0.999) |
直观理解
- SGD:路径曲折震荡,学习率固定导致难以平衡收敛速度和稳定性;
- Adagrad:路径逐渐平缓,但后期学习率过小可能停滞;
- Adam:路径平滑且快速收敛,结合动量抑制震荡,自适应学习率加速收敛。