【stm32】对射式红外传感器计次以及旋转编码器计次
对射式红外传感器计次
1. 将传感器的功能分装在一个模块里CountsSenser
2.配置外部中断
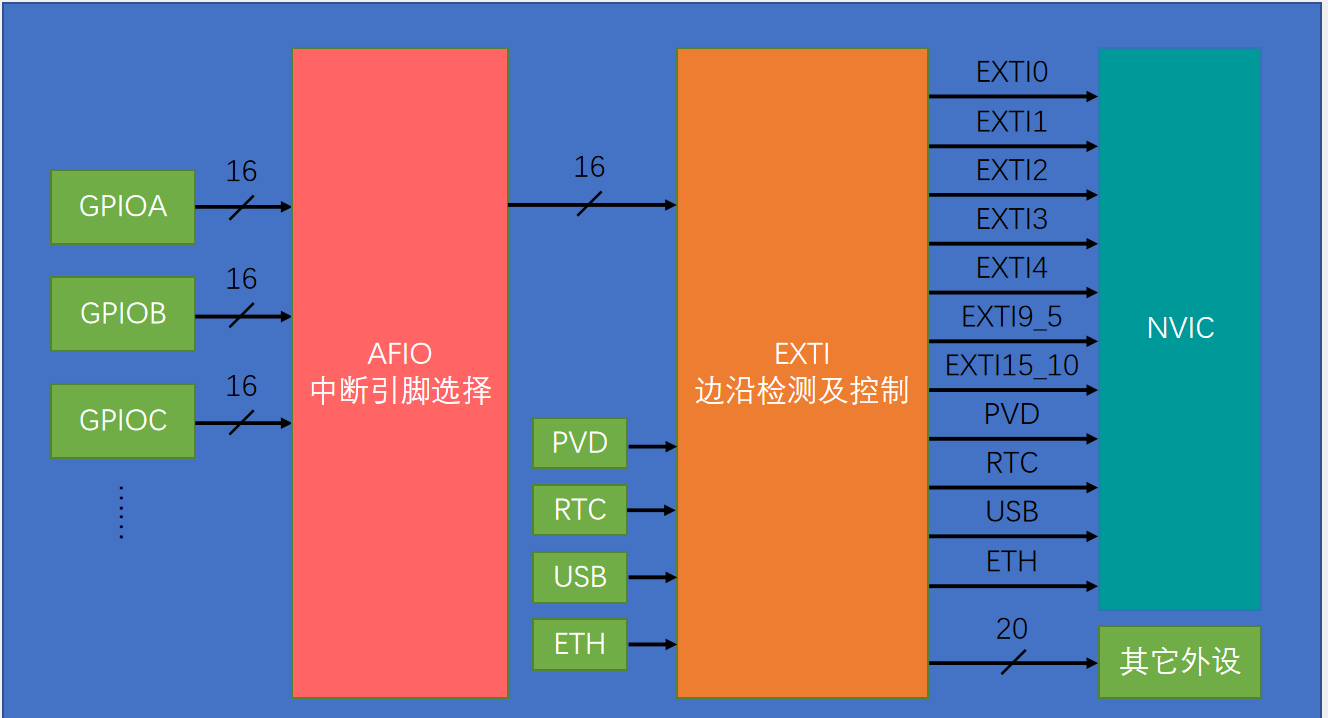
1.配置RCC,将涉及的外设的时钟都打开
2.配置GPIO,选择端口为输入模式
3.配置AFIO,选择前面使用的一路GPIO,连接到后面的EXTI
4.配置EXTI,选择边沿触发方式
5.配置NVIC,给中断选择一个合适的优先级
void GPIO_AFIODeInit(void);
复位AFIO
void GPIO_PinLockConfig(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin);
锁定GPIO引脚配置,防止意外更改
void GPIO_EventOutputConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
void GPIO_EventOutputCmd(FunctionalState NewState);
配置AFIO的事件输出功能
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState);
用来进行引脚重映射,第一个参数可以选择重映射的方式,第二个参数是新的状态
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
配置AFIO的数据选择器,选择想要的中断引脚
EXTI库函数
void EXTI_DeInit(void);
把Exti的配置都清除,恢复成上电默认的状态
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct);
可以根据这个结构体里的参数配置EXTI外设,初始化EXTI
void EXTI_StructInit(EXTI_InitTypeDef* EXTI_InitStruct);
可以把参数传递的结构体变量赋一个默认值
void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line);
软件触发外部中断
在外设运行的过程中,会产生一些状态标志位,放在状态寄存器中,当程序想要看到这些标志位时,就可以用下面四个函数:
在主程序里:
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line);可以获取指定的标志位是否被置1
void EXTI_ClearFlag(uint32_t EXTI_Line);
可以对置1的标志位进行清除
在中断函数里:
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line);
获取中断标志位是否被置1
返回值为SET/RESET
void EXTI_ClearITPendingBit(uint32_t EXTI_Line);
清除中断挂起标志位
NVIC库函数
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);
用来中断分组,参数是中断分组的方式
分组方式整个芯片只能用一种,按理说分组代码整个工程只需要执行一次就行;如果将它放在模块里面进行分组,要确保每个模块分组都选的是同一个;也可以将它放在主函数的最开始,这样模块里就不用再分组了
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);
根据结构体里面指定的参数初始化NVIC
void NVIC_SetVectorTable(uint32_t NVIC_VectTab, uint32_t Offset);
设置中断向量表
void NVIC_SystemLPConfig(uint8_t LowPowerMode, FunctionalState NewState);
系统低功耗配置
代码:
void CountSenser_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_14;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB , &GPIO_InitStructure);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB , GPIO_PinSource14);EXTI_InitTypeDef EXTI_InitStruct;EXTI_InitStruct.EXTI_Line = EXTI_Line14 ;EXTI_InitStruct.EXTI_LineCmd = ENABLE;EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_Init(&EXTI_InitStruct);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = EXTI15_10_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);
}
中断函数
中断函数的名字是固定的,每个中断通道都对应一个中断函数,中断函数的名字参考启动函数,其中以
IRQHandler结尾的字符串就是中断函数的名字

void EXTI15_10_IRQHandler(void)
{if(EXTI_GetITStatus(EXTI_Line14) == SET){CountSensor_Count ++;EXTI_ClearITPendingBit(EXTI_Line14);}
}
旋转编码器计次
新建Encoder.c和Encoder.h

例:旋转编码器接PB0和PB1
Encoder.c
int16_t Encoder_Count;void Encoder_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB , &GPIO_InitStructure);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB , GPIO_PinSource0);GPIO_EXTILineConfig(GPIO_PortSourceGPIOB , GPIO_PinSource1);EXTI_InitTypeDef EXTI_InitStruct;EXTI_InitStruct.EXTI_Line = EXTI_Line0 | EXTI_Line1;EXTI_InitStruct.EXTI_LineCmd = ENABLE;EXTI_InitStruct.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStruct.EXTI_Trigger = EXTI_Trigger_Falling;EXTI_Init(&EXTI_InitStruct);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);NVIC_InitTypeDef NVIC_InitStructure;NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);NVIC_InitStructure.NVIC_IRQChannel = EXTI1_IRQn;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2;NVIC_Init(&NVIC_InitStructure);
}int16_t Encoder_Get(void)
{int16_t Temp;Temp = Encoder_Count;Encoder_Count = 0;return Temp;
}
void EXTI0_IRQHandler(void)
{if(EXTI_GetITStatus(EXTI_Line0) == SET){if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){Encoder_Count --;}EXTI_ClearITPendingBit(EXTI_Line0);}
}void EXTI1_IRQHandler(void)
{if(GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_0) == 0){Encoder_Count ++;}if(EXTI_GetITStatus(EXTI_Line1) == SET){EXTI_ClearITPendingBit(EXTI_Line1);}
}
main.c
int16_t Num;int main(void)
{OLED_Init();Encoder_Init();while(1){Num += Encoder_Get();OLED_ShowSignedNum(1, 5, Num, 5);}
}
注:
1.中断函数里,最好不要执行耗时过长的代码,中断函数要简短快速,不要刚进中断就执行Delay,因为中断是处理突发的事情,如果为了一个突发的事情待在中断里不出来了,主程序就会收到严重阻塞
2.最好不要在中断函数和主函数调用相同的函数或者操作同一个硬件,尤其是硬件相关的函数,在实现功能的时候,可以在中断里操作变量或者标志位,当中断返回时,再对这个变量进行显示和操作,这样既能保证中断函数的简短快速,又能保证不产生冲突的硬件操作
注:
该文章为b站江协课程,为笔记