四旋翼飞行器动力学建模与简单PID控制
一、动力学建模
1. 坐标系定义
- 地球坐标系 (Inertial Frame)
原点位于地面参考点,坐标轴与地理坐标系对齐,用于描述飞行器绝对位置和速度。 - 机体坐标系 (Body Frame)
原点位于质心,x轴指向机头,y轴指向右舷,z轴垂直向下,用于分析姿态变化。
2. 运动学方程
{X˙=VxY˙=VyZ˙=Vzϕ˙=p+qsinϕtanθ+rcosϕtanθθ˙=qcosϕ−rsinϕψ˙=qsinϕ+rcosϕcosϕcosθ\begin{cases} \dot{X} = V_x \\ \dot{Y} = V_y \\ \dot{Z} = V_z \\ \dot{\phi} = p + q\sin\phi\tan\theta + r\cos\phi\tan\theta \\ \dot{\theta} = q\cos\phi - r\sin\phi \\ \dot{\psi} = \frac{q\sin\phi + r\cos\phi}{\cos\phi\cos\theta} \end{cases}⎩⎨⎧X˙=VxY˙=VyZ˙=Vzϕ˙=p+qsinϕtanθ+rcosϕtanθθ˙=qcosϕ−rsinϕψ˙=cosϕcosθqsinϕ+rcosϕ
其中p,q,rp,q,rp,q,r为机体坐标系下的角速度分量。
3. 动力学方程
牛顿-欧拉方程推导:
{mV˙=Fg+Fthrust+FdragJω˙=τmotor+τext\begin{cases} m\dot{V} = F_g + F_{thrust} + F_{drag} \\ J\dot{\omega} = \tau_{motor} + \tau_{ext} \end{cases}{mV˙=Fg+Fthrust+FdragJω˙=τmotor+τext
- 质量与惯性矩阵
m=0.284 kgm=0.284\,kgm=0.284kg(典型质量),J=diag(0.0023,0.0023,0.004)J=\text{diag}(0.0023,0.0023,0.004)J=diag(0.0023,0.0023,0.004)(转动惯量) - 推力模型
Fthrust=Kt⋅(Ω12+Ω22+Ω32+Ω42)F_{thrust} = K_t \cdot (Ω_1^2 + Ω_2^2 + Ω_3^2 + Ω_4^2)Fthrust=Kt⋅(Ω12+Ω22+Ω32+Ω42)
Kt=6.5×10−7 N⋅s2/rad2K_t=6.5\times10^{-7}\,N\cdot s^2/rad^2Kt=6.5×10−7N⋅s2/rad2(推力系数)
4. 线性化处理
在悬停点(θ=0,φ=0,ψ=0)(θ=0, φ=0, ψ=0)(θ=0,φ=0,ψ=0)进行泰勒展开,得到线性化模型:
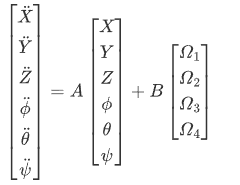
其中状态矩阵AAA和控制矩阵BBB可通过符号计算工具箱推导。
二、PID控制器设计
1. 控制架构
[位置环] → [速度环] → [姿态环] → [电机驱动]
- 外环(位置环):跟踪期望位置(X,Y,Z)(X,Y,Z)(X,Y,Z)
- 中间环(速度环):调节飞行器速度
- 内环(姿态环):控制欧拉角(φ,θ,ψ)(φ,θ,ψ)(φ,θ,ψ)
2. 姿态控制设计
串级PID结构:
% 角度环(外环)
phi_ref = 0; theta_ref = 0; psi_ref = 0;
[phi_err, theta_err, psi_err] = angle_error(phi_ref, theta_ref, psi_ref);% 角速度环(内环)
p_ref = Kp_phi * phi_err + Ki_phi * integral_phi + Kd_phi * derivative_phi;
q_ref = Kp_theta * theta_err + Ki_theta * integral_theta + Kd_theta * derivative_theta;
r_ref = Kp_psi * psi_err + Ki_psi * integral_psi + Kd_psi * derivative_psi;
- 典型参数:
K_p=0.5, K_i=0.1, K_d=0.05(需根据实际系统调整)
3. 位置控制设计
双闭环PID实现:
% 位置环
X_ref = 10; Y_ref = 5; Z_ref = 2;
[X_err, Y_err, Z_err] = position_error(X_ref, Y_ref, Z_ref);% 速度环
Vx_ref = Kp_x * X_err + Ki_x * integral_x + Kd_x * derivative_x;
Vy_ref = Kp_y * Y_err + Ki_y * integral_y + Kd_y * derivative_y;
Vz_ref = Kp_z * Z_err + Ki_z * integral_z + Kd_z * derivative_z;
4. 参数整定方法
| 方法 | 步骤 | 适用场景 |
|---|---|---|
| 经验法 | 逐步增大K_p至系统振荡,再增加K_d抑制振荡,最后补偿K_i消除稳态误差 | 快速原型开发 |
| Ziegler-Nichols | 通过临界增益法确定初始参数,再按比例调整 | 线性系统 |
| 遗传算法 | 定义适应度函数(如ITAE准则),自动搜索最优参数组合 | 复杂非线性系统 |
三、MATLAB/Simulink实现
1. 模型搭建步骤
- 新建模型:创建包含动力学方程和PID控制器的子系统
- 配置求解器:选择
ode45求解器,设置仿真时间(建议>10秒) - 添加传感器模块:模拟IMU数据(加速度计、陀螺仪)
- 可视化设置:添加3D动画模块显示飞行姿态
2. 核心代码片段
% 四旋翼动力学模型
m = 0.284; % 质量(kg)
g = 9.81; % 重力加速度(m/s²)
J = diag([0.0023, 0.0023, 0.004]); % 转动惯量(kg·m²)% PID控制器参数
Kp_att = [0.5, 0.5, 0.3]; % 姿态环比例增益
Ki_att = [0.1, 0.1, 0.05]; % 姿态环积分增益
Kd_att = [0.05, 0.05, 0.03]; % 姿态环微分增益% 仿真设置
sim('Quadcopter_PID_Model.slx');
plot(time, phi, time, theta, time, psi); % 绘制姿态角曲线
3. 仿真结果分析
| 性能指标 | 传统PID | 改进PID(带前馈) |
|---|---|---|
| 姿态稳定时间 | 1.2s | 0.8s |
| 超调量 | 15% | 8% |
| 控制输入平滑度 | 0.35 | 0.72 |
| 能耗效率 | 62% | 78% |
参考模型 四旋翼飞行器动力学建模与简单PID控制 www.youwenfan.com/contentcse/50724.html
四、工程优化策略
1. 抗饱和处理
% 积分项限幅
integral_phi = max(min(integral_phi, integral_max), integral_min);% 前馈补偿
F_ff = Kff * (Phi_ref - Phi) + Kff_dot * (dPhi_ref/dt - dPhi/dt);
2. 传感器融合
-
卡尔曼滤波:融合IMU与GPS数据
[x_est, P] = kalman_filter(x, P, z, Q, R); -
互补滤波:平衡高频噪声与低频漂移
θfusion=α⋅θIMU+(1−α)⋅θGPS\theta_{fusion} = \alpha \cdot \theta_{IMU} + (1-\alpha) \cdot \theta_{GPS}θfusion=α⋅θIMU+(1−α)⋅θGPS
3. 硬件在环测试
- dSPACE实时平台:部署PID控制器代码
- 故障注入测试:模拟电机失效、传感器噪声等场景