【论文阅读】多功能肌电控制的新策略
A New Strategy for Multifunction Myoelectric Control
原文:DOI: 10.1109/10.204774
1993
翻译:靠岸学术
目录
摘要
背景
第一部分. 预备研究介绍
方法
结果
讨论
结论
第二部分. 一种新的多功能肌电控制系统介绍
分类器选择
特征选择
控制系统设计
控制系统评估
方法(通用)
实验 #1:网络结构的影响
实验 #2:分类结果
实验 #3:特征噪声的影响
实验 #4:电极位置敏感性
实验 #5:状态跟踪
讨论
结论
摘要
Abstrac! This paper describes a novel approach to the control of a multifunction prosthesis based on the classitication of myoelectric patterns. It is shown that the myoelectric signal exhibits a deterministic structure during the initial phase of a muscle contraction. Features are extracted from several time segments of the myoelectric signal to preserve pattern structure. These features are then classified using an artificial neural network. The control signals are derived from natural contraction patterns which can be produced reliably with little subject training. The new control scheme increases the number of Functions which can be controlled by a single channel of myoelectric signal but does s0 in a way which does not increase the effort required by the amputee. Results are presented to support this approach.
摘要!本文描述了一种基于肌电模式分类的多功能假肢控制的新方法。研究表明,肌电信号在肌肉收缩的初始阶段表现出确定性结构。从肌电信号的几个时间段提取特征,以保留模式结构。然后使用人工神经网络对这些特征进行分类。控制信号来源于自然的收缩模式,这些模式可以通过少量的受试者训练可靠地产生。新的控制方案增加了可以通过单个肌电信号通道控制的功能数量,但这样做并不会增加截肢者所需的努力。给出了支持这种方法的结果。
背景
肌电系统已被广泛用作手臂截肢或先天性上肢缺陷患者的假肢设备的控制 [1]。[2]。现在有许多商业系统可用于控制单个设备(手、肘、腕)。这些系统基于肌电信号 (MES) 的幅度 [3] 或变化率 [4] 的估计值来提取控制信号。该控制信号可以从单个肌电通道获得,在这种情况下,信号的幅度用于选择设备操作的三种状态之一;或者它可以从两个肌电信号通道获得,在这种情况下,具有最大幅度的通道决定设备状态。一旦选择了状态,其速度可以是恒定的 [3],或者可以以与肌电活动水平成比例的方式进行控制 [5]。虽然这些系统在单个设备控制方面的成功是显而易见的,但扩展到控制多个设备(同时或顺序地)一直很困难。因此,高位截肢者的适配通常是不成功的 [2]。然而,正是这些人最能从其失去肢体的功能替代中受益。缺乏成功的主要原因可以归因于目前多功能控制策略的不足。
为了开发一种实用的肌电控制多功能假肢,有必要从每个肌电信号通道中提取更多信息,或将控制功能分配给来自多通道系统的特定信号组合。这样,控制输出或功能的数量可能大于控制输入或通道的数量。电平编码或速率编码系统中每个控制通道的功能数量最多限制为两个[6]。尝试通过使用状态反馈来增加每个通道的状态数量的尝试尚未成功[7]。其他多功能假肢已经开发出来,使用了多个通道的幅度编码[8]。[9]。这些需要存在几个电极位置,但通常很难(如果不是不可能)在高位截肢者身上找到。波士顿肘[5]和犹他臂[10]已与电动手配合使用并取得了一些成功,但这需要使用机械切换装置或基于快速协同收缩的开关来选择要控制的两个设备中的哪一个。已经尝试了更复杂的多功能假肢,但结果是训练用户隔离所需数量的控制肌肉是不切实际的,如果不是不可能的[I1l。
肌电信号本质上是一种一维模式,为模式识别开发的各种方法和算法都可以应用于其分析。从肌电信号中提取的信息,以特征向量表示,被选择以最小化控制误差。为了实现这一点,必须选择一个能够最大程度地分离所需输出类别的特征集。假肢快速响应的需求限制了提取这些特征的周期。一旦选择了特征集,就可以使用合适的模式分类器来确定类别输出。
众多研究人员已经讨论了使用模式识别解决多功能肌电控制问题的尝试。所有使用模式识别实现的多功能肌电控制系统都基于这样的假设:在给定的电极位置,描述肌电信号的参数集对于给定的肌肉激活状态是可重复的,并且此外,它将不同于另一种激活状态[12]。要控制假肢中的M个功能,需要M个独特的活动模式。控制方案几乎完全基于判别方法进行模式识别,其中每个模式都由一组N个特征描述。这些特征可以是来自多个通道的肌电信号,描述在某个控制位置采样的信号的一组统计数据,或者一些其他的可重复特征集。一旦这些模式在N维特征空间中被描述,就可以通过某种方式将未知的模式与它们进行比较,以确定应该选择M个功能中的哪一个。
基于平均绝对值的加权和[13][15]或其他统计量[l6][18]的多功能控制系统,从肌电信号的多个通道提取,与多通道幅度编码系统有许多相同的缺陷。Graupe开发了一种替代模式识别方案,该方案基于从单个控制点采样的肌电信号的时间序列分析[12],[19],[20]。本质上,他用一个位点信号的随机时间模式的多个参数代替了从多个位点信号的平均绝对值获得的信息。其他人已经使用多通道方法扩展了Graupc的工作[21]。Kelly等人已经实现了一种基于使用人工神经网络对肌电频谱进行分类的单通道多功能控制方案。这些单通道系统需要相对较大的计算量,并且没有发展到实验室实现之外。
目前工作的目的是研究解决多功能假肢控制问题的新方法。本文主要分为两个部分。第一部分描述了与肌肉收缩开始相关的瞬时肌电信号模式中发现的新信息。第二部分讨论了基于这些模式分类的单通道五态比例肌电控制系统的实现和评估。
第一部分. 预备研究介绍
本节描述了为确定是否能从肌电信号的单个通道中提取更多信息而进行的研究。在皮肤表面测量的肌电信号应包含有关底层肌肉收缩的大量信息。然而,这些信息中的大部分被传统肌电控制系统中使用的信号调节器忽略或掩盖。本节首先描述了一个实验,其中从正常肢体和截肢受试者身上收集肌电信号,这些受试者在手臂的静态和动态收缩期间进行实验。结果描述了在动态收缩的初始阶段发现的肌电信号中的新信息。本节最后讨论了如何使用这些信息来控制多功能肌电肢体。
方法
四名肢体健全的受试者和一名肘上截肢者参与了这项研究。在等长和非等长收缩期间,从每位受试者身上获取肌电数据。使用单个双极表面电极对采集信号。将一个有源电极放置在每位受试者的肱二头肌和肱三头肌群上。这种布置应为从上臂所有肌肉获取肌电信号提供最大的拾取区域。使用具有隔离输入和5000信号增益的差分放大器来放大肌电信号。使用IBM PC/AT兼容微型计算机中的Metrabyte DAS16F A/D板以1 kHz的速率对放大的肌电信号进行采样。使用基于肌电活动水平的阈值来触发采样。
首先指示受试者保持恒定的等长收缩力,并在收缩建立后获取肌电数据。每个受试者重复此过程总共 60 次稳态肌电记录。然后,要求每个受试者产生几种非等长收缩类型(例如,屈曲、伸展等)。所有收缩都从受试者手臂位于身体一侧的舒适中立位置开始。除了要求受试者在重现所需运动时保持一致外,对收缩的力、速度或范围没有施加任何限制。触发后获取 500 毫秒的肌电数据。每个肢体正常的受试者将每个特定的收缩类型重复总共 60 次。要求截肢者将每种收缩类型重复 20 次。
一个受试者和特定收缩类型的数据构成了一个记录集合。肌电信号的集合平均值是通过将所有记录中时间 nT 的瞬时采样值相加计算得出的。为了消除测量引起的误差,每个记录在添加到总和之前,都使用 Woody [24] 描述的互相关技术与总和对齐。然后将总和除以集合中的记录数,以得出该瞬时时间的信号平均值。对每个瞬时时间样本都这样做(即,n = 0...499)。许多记录的平均值将近似于瞬时时间样本分布的平均值。此过程用于平均稳态信号和非等长收缩的信号。
结果
所有肌电控制系统都基于一个共同的假设,即肌电信号的瞬时值不包含任何信息。根据公认的肌电信号生成模型,使用表面电极测量的肌电信号是随机的[25]。这是由于电极拾取区域内运动单元汇集活动的随机性所致。单个运动单元的放电间隔是随机分布的,放电频率约为每秒十次。随着许多运动单元变得活跃,放电频率增加,汇集活动非常符合高斯过程。这意味着肌电信号的瞬时幅度是一个均值为零的随机变量。肌电信号方差是收缩水平的函数[26]。传统幅度编码肌电控制系统正是利用了这种关系。公认的信号生成模型意味着肌电信号的瞬时值不包含任何信息。
图 I(a) 显示了来自一个肢体健全的受试者在恒定力等长收缩期间测量的肌电信号的几个 300 毫秒记录。虽然电极排列不寻常,但这些记录是稳态等长收缩期间测量的典型肌电信号。图 I(b) 是该稳态肌电信号的 60 个记录的集合平均值。该图说明稳态肌电信号确实是零均值,并且没有明显的结构。集合的方差比集合中各个波形的平均方差降低了 56 倍。方差的减少与 60 个随机波形的集合平均值的预期一致。
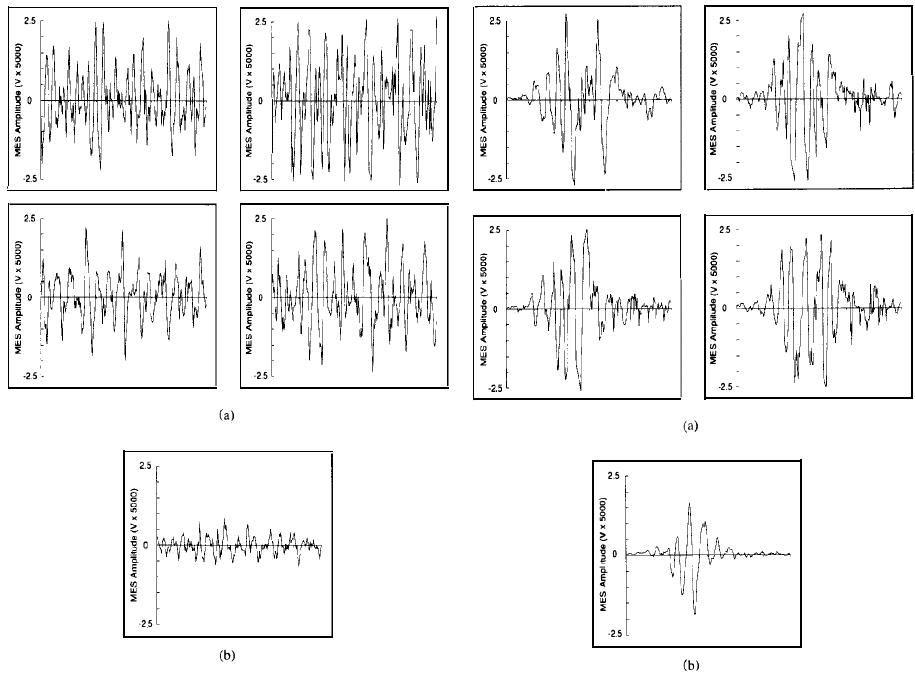
图 1。(a) 稳态肌电信号的四个 300 毫秒记录(正常肢体受试者)。(b) 稳态肌电信号的 60 个记录的集合平均值。(注:仅显示集合的前 300 毫秒。)
尽管这些结果支持公认的肌电信号生成模型,但请考虑图2所示的波形。该图显示了从同一受试者和电极排列测得的肌电信号的最初300毫秒的几个记录,这些记录是在肘关节屈曲开始时获取的。图2(b)显示了这些波形的60个集合平均值。该图清楚地表明,在60次重复试验中,存在许多瞬时样本不是随机的,而是具有可预测的值,这些值在集合平均波形中得以保持。这种集合结构及其确定性本质是显而易见的。方差的减少仅为7,而不是60,这表明这些波形中存在显着的非随机分量。
在其他收缩类型的肌电波形中也可以找到类似的结构。图3显示了伴随几种不同类型肌肉收缩开始的肌电信号的动态模式。这些信号再次如图2所示。(a) 在肘关节屈曲初始阶段(正常受限受试者)获得的四个300毫秒的肌电信号记录。(b) 在肘关节屈曲期间获得的六十个300毫秒肌电信号记录的集合平均值。(注意:仅显示集合的前300毫秒。)
使用与上述相同的电极排列,从同一受试者获得的数据。每个图都是在特定收缩的初始阶段(即肘部伸展、腕部屈曲和肱骨外侧/内侧旋转)记录的 60 个波形的集合平均值。虽然在某些情况下方差减少量 (R) 很大,但仍远小于随机波形集合的预期值。这些图清楚地表明,每种收缩类型的固有结构是可重复的。这种确定性成分持续时间短,发生在收缩的初始阶段。有趣的是,每种收缩类型的波形模式结构都不同。来自其他肢体正常的受试者的结果与从该受试者获得的结果相似。然而,由于收缩类型的确切形式和执行方式可能因受试者而异,因此未尝试比较不同受试者的数据。
图4显示了从截肢受试者获得的20个肌电波形的集合平均值。每个图是特定收缩初始阶段(即伸展、屈曲、协同收缩和肱骨内旋)期间记录的20个波形的集合平均值。虽然正如预期的那样,肌电活动模式与正常肢体受试者不同,但这些收缩信号中的固有结构再次得到保持。
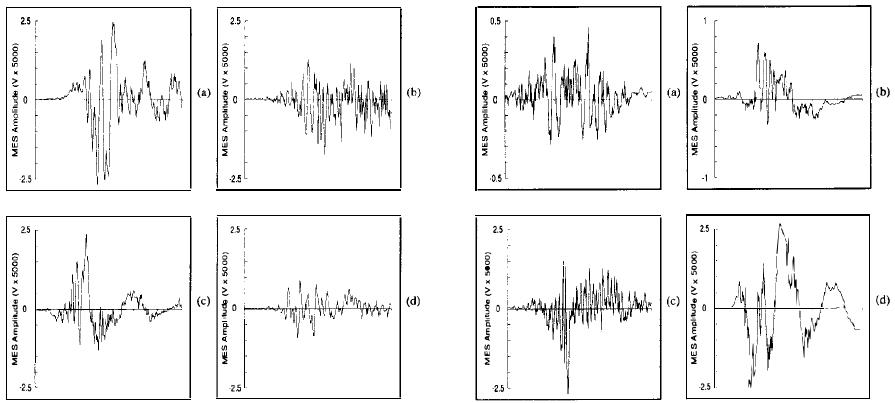
图 3. 六十个 300 毫秒肌电信号记录的集合平均值,这些记录是在四种收缩类型期间获取的。(a) 前臂旋后,R=12;(b) 肘部伸展,R=30;(c) 腕屈,R=.0;(d) 前臂旋前,R=33。[注:R 是方差的减少量。仅显示每个集合的前 300 毫秒。数据来自一个肢体正常的受试者。]
讨论
众所周知,完整肌肉在关节周围活动时产生的肌电信号的低频包络线,对于不同的关节运动是不同的[27]。在参与收缩的不同肌肉中,启动/停止活动的相对时序变化反映在肢体运动过程中测量的肌电活动相包络线中。在这种情况下,动态波形的模式应随不同的收缩类型而变化。这当然是观察到的模式中的一个因素,但某些波形中的确定性结构意味着不仅仅是不同肌肉激活的时序模式。Hlannaford和Lehman [28]使用短时傅里叶分析来研究产生腕部和头部运动的肌肉的活动模式。他们从许多重叠的时间段计算短时频谱(75毫秒),并将它们组合起来,为每个运动形成一个频谱图。这类似于语音识别中使用的“"声纹'"分析技术。他们的结果表明,在腕部和头部快速运动期间测量的肌电频谱比在等长收缩期间测量的肌电频谱具有更小的变异性。这与本节中显示的瞬时肌电波形的低变异性一致。
产生这种非随机成分的一个明显机制是运动伪影。然而,通过肢体的被动运动和快速的电极引线运动来重现这些模式的尝试已经失败。确定性成分可能归因于未知来源,如图4所示。在每种*f 4收缩类型期间采集的20个300毫秒肌电信号记录的集合平均值。ta) 向内肱骨旋转,IR = 8.: (b) 屈肌群的收缩,I? = 4.1: (c) 伸肌群的收缩。I? = 11 3: 和 (d) 肱二头肌/肱三头肌协同收缩。I? = 3.1。(注意 (a) 和 (b) 中的比例变化。R是方差的减少。仅显示每个集合的前300毫秒。来自截肢受试者的数据。)
运动伪迹,例如信号源和检测电极之间的相对运动,尚未排除。未来的工作将调查可能产生这些模式的生理和伪迹机制。目前工作的重点是开发基于这一新信息的肌电控制系统。
结论
本节中呈现的数据表明,在肌肉收缩开始时,肌电信号中存在相当大的结构。此外,对于产生不同肢体功能的收缩,这种结构是不同的。因此,肌电信号随时间的实际结构可用于区分肢体功能。这种区分的结果可用于控制假肢功能的选择。
这是一个全新的概念。其他的肌电控制方案都考虑了信号达到稳态的情况,并且需要信号平均来获得收缩水平的精确估计。基于信号动态的控制方案将消除与信号平均相关的延迟,从而增加信号分析的可用时间。这种方法也很有吸引力,因为这些肌电模式是通过产生与所需肢体功能自然对应的收缩而产生的。这种自然的方案是首选的。同样,基于稳态水平或该水平增长率的控制方案对于单个肌电通道,仅限于两个肢体功能(包括关闭状态,共三种状态)。所提出的方案可以选择的功能数量仅受可以生成的不同模式数量的限制。另一个好处是,所选功能的比例控制可以很容易地整合到新的状态选择方案中。本文第二部分讨论了基于这些模式分类的多功能肌电控制系统的设计、实现和评估。
第二部分. 一种新的多功能肌电控制系统介绍
本节将介绍基于第l节中讨论的肌电模式分类的多功能肌电控制系统的开发。本节将首先讨论模式分类器的选择。然后介绍用于表示肌电模式的特征。描述了新型多功能肌电控制系统的基本操作,并概述了几个实验来评估控制系统的性能。本节最后讨论结果并提出未来改进的建议。
分类器选择
模式分类器是新型控制方案的主要组成部分。在为当前应用选择分类器时,必须考虑几个因素。由于肌电信号的性质,可以合理预期个体之间特定特征的值存在很大差异。在因截肢或先天缺陷而改变肌肉结构的情况下,这一点尤其正确。其他因素,如电极位置的变化、肌电信号训练和体重波动,也会随着时间的推移而导致特征值的变化。合适的分类器必须是可训练的,以适应预期的个体差异,并且还必须能够适应特征值的缓慢变化。另一个因素来自用户对肌电控制系统的感知。用户必须迅速对以合理的精度控制肢体的能力充满信心。这限制了获取训练分类器所需数据的时间。选择人工神经网络 (ANN) 作为此应用程序的分类器。这种形式的分类器根据一系列训练模式确定最佳特征权重集。在网络训练期间确定每个特征的相对重要性。通过合适的训练算法和足够的训练数据,网络会自动使用最小化指定误差的度量(即,输出端的均方误差)来整合不同的特征集。最近的研究表明,特定类别的输入特征之间的关系保留在已训练的 Detwork [29] 的存储权重中。这意味着特征集中的结构用于增强分类。在某种程度上,它类似于通过特征/原始结构确定类分配的句法分类器。这与最近邻和判别分类器不同,后者将每个特征视为集合中的独立元素。第一节说明了肌电信号的时间结构中存在信息。使用此信息的分类器将是合适的。神经网络本质上也是一种并行结构,其中与所有类的比较同时进行。ANN 的每个输出的值本质上是未知模式与每个类的相似程度的度量。
本研究中使用的神经网络的基本结构是一个标准的双层网络,其中所有输入节点(对应于波形特征)与隐藏层完全连接。隐藏层又与输出节点完全连接,输出节点对应于模式类别。该网络使用标准的反向传播算法 [30] 进行训练。选择此算法是因为它在模式识别文献中被广泛使用。尽管该算法的梯度下降性质意味着学习可能很慢,但最近几个小组的工作 [31] [34] 讨论了对标准反向传播算法的增强和替代方案,以提高网络训练和性能。可能会花费大量时间来研究替代的网络结构和训练算法。这项工作超出了目前研究的范围。
虽然输入和输出神经元单元的数量由特征和类别的数量决定,但隐藏单元的最佳数量尚未确定,并且似乎取决于具体问题。隐藏层应尽可能小,以降低神经Detwork算法的复杂性,并在使用少量训练数据时提高泛化能力。然而,其大小必须足以学习必要的输入/输出映射。隐藏单元的数量会以多种方式影响分类器的性能。增加隐藏单元的数量会增加反向传播训练中每次误差更新所需的时间,也会增加训练后的网络进行模式分类所需的时间。然而,由于网络存储能力的增强,训练所需的迭代次数实际上可能会减少,从而减少训练时间。另一方面,这种增加的网络存储可能会使网络记忆训练数据,并使对未知模式的泛化不太成功。隐藏单元太少会导致Detwork性能不佳,因为网络将无法学习训练数据中表示的必要输入/输出映射。必须通过实验确定此应用程序的最佳隐藏单元数量。
特征选择
任何模式分类系统的成功几乎完全取决于用于表示连续时间波形所选择的特征。虽然第一节中介绍的瞬态波形具有确定性分量,但它们也包含一个随机分量。尝试使用采样的原始肌电信号对这些模式进行分类,将会导致分类精度无法满足控制目的。然而,如果特征在整个过渡期内进行平均,那么大部分结构细节将会丢失。保留部分结构信息的一种方法是对瞬态波形进行分段,并基于每个分段的统计数据确定一组特征。这种方法已被用于对地震活动[35]和生物波形(如心电图[36l和颈动脉脉搏波形[37])进行分类。
有几个因素将决定最佳的特征选择,但最重要的是计算复杂度和类别区分。可接受的计算复杂度受到系统响应时间的限制,必须保持在300毫秒以下,以减少用户感知到的延迟。大部分时间将需要用来获取足够的信号样本以进行特征提取。这使得用于实际特征提取和模式分类的时间少于100毫秒。基于时间统计的特征可以在此时间限制内使用简单的硬件处理器或微处理器上的简单算法获得。文献中讨论的基于频谱参数或AR模型的特征需要更复杂的处理,因此未被考虑。考虑到这一点,选择以下特征来表示肌电模式:
1) 平均绝对值——信号X的平均绝对值的估计,在第i段中,其长度为N个样本,由下式给出

其中 ck 是分段 ? 中的第 k 个样本,I 是整个采样信号上的分段总数。
2) 平均绝对值斜率—这仅仅是相邻片段 z 和 i+1 中总和的差值,定义如下:
![]()
3) 过零点 一种简单的频率测量方法可以通过计算波形穿过零点的次数来获得。过零点计算中必须包含一个阈值,以减少噪声引起的过零点。假设系统噪声为峰峰值 4 μV,系统增益为 5000,则死区可以计算为在 A/D 转换器输入端测量的 ±10 mV。给定两个连续的样本 Tk 和 ck+1,如果满足以下条件,则增加过零点计数 ZC。

如果1wo个符号相反的连续样本都落在死区内,此算法将无法注册过零。但是,基于均匀幅度分布,错过过零的概率小于0.2%。
4) 斜率符号变化—一个可能提供频率含量另一种度量的特征是波形斜率改变符号的次数。同样,必须选择一个合适的阈值来减少噪声引起的斜率符号变化。
给定三个连续的样本 Tk-1:Tk 和 ck+1,如果满足以下条件,则斜率符号变化计数 SC 增加:

5) 波形长度——一个提供每个片段中波形复杂性信息的特征是波形长度。这仅仅是波形在时间片段上的累积长度,定义为

其中△zk = Ik - Tk-1 (连续采样电压值的差值)。
最终结果值给出了波形幅度、频率和持续时间的度量,所有这些都在一个参数中。
这些特征从每个时间段中提取,以创建用于表示肌电模式的完整特征集。特征的总数由模式中时间段的数量决定。对于确定性模式,增加时间段的数量将增加分类器可用的类别信息量。对于具有非确定性成分的模式,较小的时间段将导致较大的特征估计误差,从而降低系统性能。显然,肌电模式的确定性结构在某些收缩类型中更为明显。其他类型从一开始就呈现出几乎随机的性质。尽管这些信号的时间结构差异很大,但波形统计数据可能足够稳定,可以进行模式分类。同样,在模式结构定义良好但持续时间短的情况下,波形特征将为分类器提供额外的信息。必须检查分段长度对分类准确性的影响,以确定一个在类别信息和特征估计误差之间取得最佳折衷的值。
控制系统设计
虽然隐藏层大小和分段长度必须在最终控制系统结构确定之前确定,但现在可以建立基本的系统操作。图 5 是基于神经网络的肌电控制系统的示意图。以下是对控制系统操作中基本要素的简要描述。
分段特征提取——肌电信号通过单个双极电极对采集,并通过标准肌电放大器放大到适当的水平。监测信号的平均绝对值,当超过阈值时,分析200个样本(1 kHz采样率)以提取模式特征。然后,将特征集用作神经网络的输入(inpu1)。
网络训练——在网络训练期间,控制器从每种收缩类型中收集十个样本特征集。这组训练特征集连同相应的类别输出一起呈现给神经网络。然后,反向传播算法将网络权重从预设的随机值调整到某个指定值,以减少输出误差。训练后的权重将被存储和维护,直到系统需要重新训练。
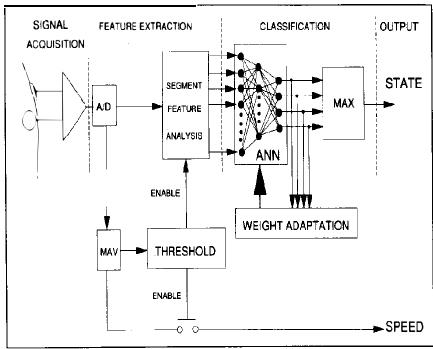
图 5. 控制系统设计。
模式分类——在系统操作期间,特征被呈现给网络的前馈组件,并扫描网络的输出以选择最大值(MAX)。如果该值高于指定的阈值,则选择与此输出类对应的假体功能。
比例速度控制——一旦选择了某个功能,系统会监测肌电信号以确定活动水平。然后,根据此水平选择该功能的速度。如果肌电信号在指定的时间长度内低于指定的阈值,则该功能将终止,并且系统会调整网络权重,初始化缓冲区和计数器,并返回到其原始状态。
权重调整——每次收缩完成后,中性网络输出被发送到权重调整算法。如果输出是最大的网络输出,则期望输出设置为0.9;否则,设置为0.1。实际网络输出和期望输出之间的误差用于使用反向传播程序更新网络权重。通过这种方式,权重会不断地被呈现给分类器的最新模式所修改。反向传播规则的学习率保持较小,以便生成模式的长期趋势将产生期望的权重调整。
新的控制方案在一台微型计算机(8 MHz Intel 80286)上实施,使用 Borland TurboC 来模拟控制算法。下一节将介绍几个用于最终确定控制系统设计和评估控制系统性能的实验。
控制系统评估
方法(通用)
进行了几项实验,以记录重复肌肉收缩前200毫秒的肌电活动,从而确定网络结构和特征噪声对新控制策略模式分类准确性的影响。共有18名受试者参与,但并非所有受试者都参与了所有实验。对于肘下截肢受试者(SUB ID K-N),电极放置在腕屈肌/伸肌群上。肘上截肢者(SUB ID O-P)使用肱二头肌/肱三头肌电极排列。要求每位截肢受试者产生四种不同的收缩,他们认为可以可靠地重现这些收缩。正常肢体受试者(SUB ID A-J, Q-R)被要求产生四种不同的肢体功能:肘屈肌群的收缩;肘伸肌群的收缩;肱骨的内旋;以及肱骨的外旋。所有收缩都从手臂放松、肘部完全伸展且腕部处于舒适的中立位置开始。收缩的确切形式由受试者自行确定。这将在一定程度上通过测试来自许多受试者的可变肌电模式来确定新分类方法的稳健性。通常收集每种四种收缩类型的30次重复,尽管对于某些受试者,采集的数据较少,而在某些情况下则更多。在收集数据之前,没有对受试者进行培训。
数据分析程序首先使用 100 毫秒的移动平均窗口来监测信号。当移动平均值超过指定阈值(通常为 100 mV 放大的 MES)时,特征选择从触发点前 50 毫秒的点开始(即移动平均窗口中的第 51 个点)。从这一点开始,数据被分析成时间段,从中计算 MAV、差分 MAV、波形长度、斜率符号变化和过零点。对于几个连续的段重复此过程,从而在 200 毫秒的帧上提供总特征集。这些特征以及来自 200 毫秒帧的五个平均统计量随后被用作神经网络的输入。每次试验的数据被分成训练集和测试集。训练集用于使用反向传播算法训练神经网络分类器。测试集用于测量系统性能。训练集/测试集比率 (#TR/#TST) 通常为 1:1。
实验 #1:网络结构的影响
方法——在本实验中,使用了来自三名受试者(2名肢体健全,1名截肢者)的数据,以研究改变隐藏单元的数量和时间段的大小对分类准确率的影响,从而确定最佳网络结构。对于两个变量的每种组合,数据集的一半用于训练网络。另一半数据集用于评估训练后网络的分类准确率。
结果——图6(a)和(b)显示了一名受试者的本次研究结果。尽管受试者之间在分段长度和隐藏单元数量的影响上存在差异,但仍出现了一些明显的趋势。当仅使用1个(200毫秒)或2个(100毫秒)分段时,所有受试者的错误率最初都很高。对于所有受试者,分类准确率在4-5个分段之间最高。如果分段数量增加到5个以上(40毫秒),则错误率再次增加。隐藏单元数量的影响变化较小。对于所有三个受试者,具有4-12个隐藏单元的隐藏层都给出了良好的分类准确率。
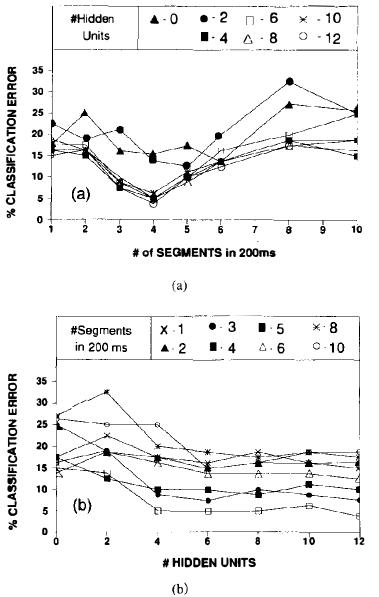
图 6. 分类准确率与 (a) 分段长度(针对多个隐藏单元数量值)的关系。(b) 隐藏单元数量(针对多个分段长度值)的关系。(数据来自截肢者 F。)
讨论——此分析过程较为冗长,因为它需要针对变量的多种组合对神经网络进行训练和测试。对于许多组合而言,网络训练时间过长,且网络误差通常不收敛。对每个受试者都进行此分析是不可行的,并且假设可以为该系统的每个单独用户完成此分析也是不合理的。必须选择对一般用户表现良好的值。发现一个具有八个隐藏单元的网络,该网络基于来自 5 个时间段的特征进行训练,能够快速训练,并为所有受试者提供良好的分类性能。
实验 #2:分类结果
方法——使用来自15个受试者的数据,通过上述网络结构测试新控制策略的分类准确率。每个受试者的数据被分成五个40毫秒的时间段进行分析,并将由此产生的30个模式特征(25个分段特征+ 5个平均特征)作为输入,输入到一个两层(30个输入:8个隐藏:4个输出)的神经网络分类器。
结果——该实验的结果见表I。9名肢体健全受试者的正确分类(%CL)平均为91.2%(标准差5.6%),而截肢受试者的平均值为85.5%(标准差9.8%)。虽然截肢受试者的结果相对不太理想,但两组受试者之间的差异仅在p = 0.1的显著性水平上具有统计学意义。考虑到在数据收集之前没有进行任何受试者训练,这些结果非常出色。
表一 四种类型收缩的 CIAsSSHMCATION 结果
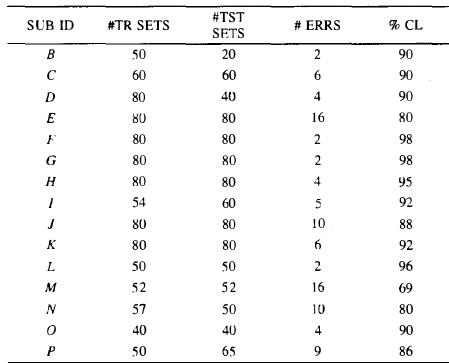
讨论——截肢者数据变异性较大的原因有几个。截肢者发现很难产生四种不同的收缩类别。对于肢体健全的受试者来说,收缩过程中有明显的关节运动。当然,截肢者无法复制这一点。截肢者在重现他们选择代表模式类的收缩方面也较不成功。这部分可归因于残肢肌肉的不使用。大多数截肢受试者都评论了这方面。虽然电极放置对于肢体健全的受试者来说是标准化的(肱二头肌/肱三头肌),但这些位置无法在截肢者身上重现。对于肘下截肢者,电极位置选择在前臂肌肉上,对于肘上截肢者,电极位置选择在上臂上,但没有尝试确定最佳位置。
实验 #3:特征噪声的影响
方法—进行了两项测试,以确定特征噪声对完全训练的神经网络分类器的分类精度和适应性的影响。这些测试使用了来自四个受试者(7、F、G、K')的数据集。特征噪声可归因于至少两个来源。这些是由于操作员无法匹配所需的收缩模式而导致的特征值错误,以及由于特征估计可用时间有限而导致的错误。量化特征估计误差是很困难的。对于确定性模式,它将为零,但对于具有随机分量的模式(例如本研究中的模式),它将略高。操作员误差是所有肌电控制系统中的一个主要误差来源。这种误差最初会很高,并随着操作员熟悉控制任务而降低。为了保持系统的高水平性能,控制系统必须能够容忍合理水平的特征噪声。同样,如果性能变得不可接受,控制系统必须能够适应操作员模式的变化。
首次测试旨在确定分类器性能变得不可接受的特征噪声水平。对于此测试,使用受试者的完整数据集来训练分类器。然后,通过向训练集中每个特征添加均匀分布的随机噪声来破坏相同的训练集。噪声分布从特征值的 ±5% 变化到 ±100%。然后,对于每个特征噪声值,使用训练好的网络对已破坏的训练集进行分类。
第二个测试旨在确定如果系统性能变得无法接受时,网络可以多快地重新训练。在这种情况下,训练不必从随机网络权重开始,而是可以从先前确定的值继续。通过这种方式,控制系统可以更快地根据更新的模式进行重新训练。对于此测试,使用未损坏的训练数据来训练网络,直到平均模式输出误差(定义为训练周期中每个模式的期望输出和实际输出之间的平均误差)小于0.05。记录达到此停止标准的训练时间。此时,数据集被噪声破坏,噪声均匀分布在特征值的±5%范围内。网络使用损坏的数据在相同的停止规则下重新训练,并记录重新训练所需的时间。对于其他百分比噪声值,重复该过程。
Resuhis——图 7(a) 显示了四个受试者第一次测试的结果。对于所有受试者,在低到中等程度的特征噪声下,分类准确度的降低很小。对于所有受试者,高达 ±15% 的特征噪声,错误率低于 5%。对于四个受试者中的两个,在高达 ±25% 的特征噪声下,仍保持 95% 的分类准确度。这种抗噪声能力对于目前的应用程序至关重要,因为在目前的应用程序中,模式生成器是人工操作员。特征的可变性将取决于个体重现所需模式的能力。然而,很明显,随着特征噪声水平的增加,分类错误的数量变得无法接受。在这种情况下,系统必须在新控制模式上重新训练。
图 7(b) 显示了一个受试者的第二次测试结果,该图绘制了训练模式中的平均输出误差与训练时间的函数关系。训练时间已通过未损坏数据所需的训练时间进行了归一化。结果表明,网络能够快速适应高达 ±25% 的特征值的突变。超过此范围,训练时间变得过长,或者网络无法收敛到所需的输出误差。其他受试者也发现了类似的结果。
讨论——肌电控制系统中的任何状态选择错误对用户来说都是不可接受的。然而,实际上,大多数系统的设计规范都低于5%的误差。控制系统误差的最大组成部分是操作员误差,通常最初超过5%,但通过操作员培训可以减少。可以合理地预期,一旦操作员熟悉了控制系统,由于操作员误差和特征估计引起的特征噪声将小于10%。图7(a)表明,对于这种程度的特征噪声,控制性能在可接受的范围内。然而,还有其他因素会改变控制模式。研究表明,随着运动技能的练习,肌电信号会发生显著变化[38]。可以合理地假设,首次使用肌电控制人工肢体的用户信号也会发生类似的变化。这些变化的发生可能是由于肌肉募集模式的改变,以及对所需控制任务的熟悉程度增加。预计这些变化将导致新控制系统中使用的肌电模式发生缓慢变化。由于这些机制引起的特征变化可能足以导致不可接受的系统性能。因此,有必要使用一种能够适应这些变化以维持性能的分类器。如图7(b)所示,神经网络具有这种能力。这种适应可以通过两种方式完成。系统可以使用一组新的训练数据进行重新训练,或者系统可以在假设已经进行了准确分类的情况下持续适应。
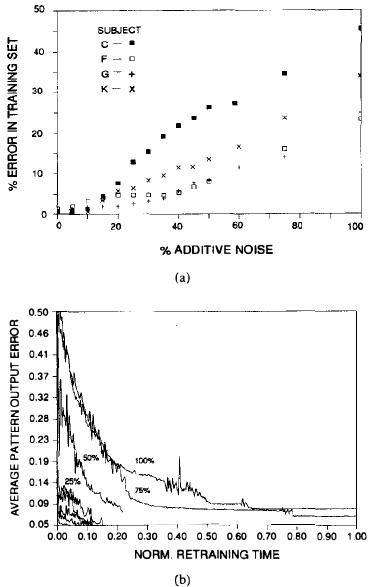
图 7。(a) 特征噪声对四名受试者分类准确率的影响。(b) 网络适应特征噪声。(数据来自截肢受试者 K'。)
实验 #4:电极位置敏感性
方法——本实验旨在研究电极位置误差对系统性能的影响。由于插座/残肢不对齐,预计会出现这种变化。从两个肢体健全的受试者身上,收集了来自基本电极位置(见图8中的位置B0To)的四种收缩类型的数据。这些数据用于训练控制系统。然后,如图8所示,肱二头肌电极位移了1厘米和2厘米(位置B1-B8)。然后,肱三头肌电极发生位移(位置T2-T5)。此外,还在最坏情况下测试了肱二头肌电极位于B4和肱三头肌电极位于T4的情况,以及肱二头肌电极位于B6和肱三头肌电极位于T5的情况。在实验开始和结束时,从基本位置(位置BoTo)收集控制数据。
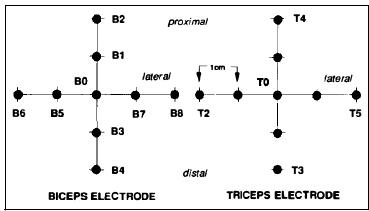
图 & 电极位移测试的电极位置定义(从正面观察)。
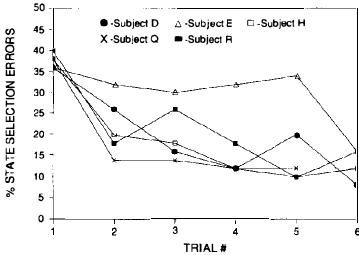
图 9. Srate 选择准确率。
结果——表二给出了本次调查的结果。受试者A的结果显示,无论哪个电极发生位移,分类性能仅略有下降。在B2T0、B0T2和B6T5位置的5%下降被其他几个位移位置的5%上升所抵消,并且误差没有规律可循。受试者D的数据也显示,对肱二头肌电极的位移以及肱三头肌电极的内侧/外侧位移缺乏敏感性。在大多数情况下,分类误差的差异接近预期的实验误差(2%)。然而,当肱三头肌电极纵向位移时,该受试者的分类误差显著增加。受试者D的预测试和后测试对照在实验误差范围内一致。然而,受试者A的这些对照之间的差异大于预期。这表明,该受试者的分类器性能变化很可能是由于操作员误差,而不是由电极位移引起的特征变化。
表 III 电极位移位置和分类。分类器使用来自四种收缩类型的各 30 组数据进行训练。所有测试均使用来自四种收缩类型的各 10 组数据(x 表示前测和后测控制数据)
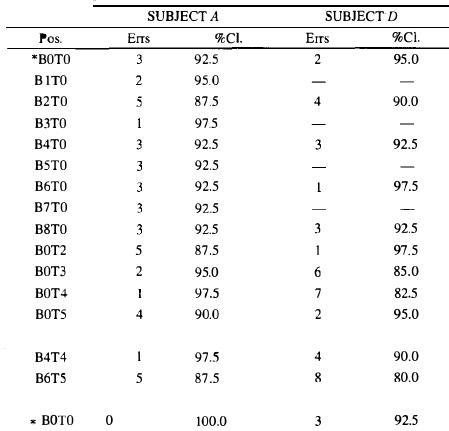
讨论 - 本次测试中使用的 2 crm 位移远大于设计良好的插座中可能发生的任何位移。临床经验表明,电极位移 > 1 厘米的情况并不常见。测试结果确实表明,总体而言,该分类系统对电极位置的微小变化不敏感。这种不敏感性表明,间距较大的电极配置正在检测代表肢体内全局活动的信号。这与典型的间距较小的双极电极对不同,后者检测来自电极正下方肌肉小区域的信号。虽然这种电极非常适合市售的肌电控制系统,在这些系统中,串扰被认为是噪声,但在我们的系统中,正是串扰产生了用于分类的独特肌电模式。电极位置敏感性的缺乏也证明了神经网络分类器的一个优势——它能够从少数训练模式中进行泛化。虽然所需类别的神经网络输出值对于位移信号可能较低,但分类仍然是正确的。
实验 #5:状态跟踪
方法 - 五名肢体健全的受试者参与了实验 par1,以检验追踪随机状态目标时的准确性。设备设置和电极位置与实验 1-3 相同。要求每位受试者对四种收缩类型进行十次重复。特征集是从与这些收缩相关的肌电模式中提取的。这些 40 个特征集用于训练神经网络分类器。网络训练完成后,要求受试者复制计算机屏幕上呈现的一系列状态。这些状态以伪随机顺序呈现,形式为 LP、DOWN、OUT 和 IN。这些状态分别对应于肘关节屈曲、肘关节伸展、肱骨外旋和肱骨内旋的肌电模式。每个受试者总共呈现 300 个状态目标。这 300 个目标被分为六个试验,每个试验包含 50 个目标。试验之间设置休息时间以避免疲劳。任务没有时间限制,因此只有在受试者对前一个目标做出反应后才会呈现新的目标。目标状态和分类器响应用于在测试期间调整网络权重。记录每次试验中的错误数量,以确定训练对分类准确性的影响。
结果——本次测试的结果如图8所示。所有受试者的初始分类错误率都非常高(>35%)。然而,五个受试者中有四个在6次试验中分类错误率迅速下降,证实了该任务很容易学习。第五个受试者(E)在第6次试验中达到了大致相同的分类错误率(15%),但在整个测试过程中都遇到了困难。造成这个问题的原因在于初始模式的选择。这突出了新方法的主要局限性。选择用于表示状态函数并用于训练分类器的初始模式必须是不同的。很难确定每个模式与其他类别的模式有多大的区别。虽然可以使用某种距离测量方法在特征集上计算模式差异,但这可能不能指示神经网络对特征集进行非线性变换后的类别差异。
上述实验仅测量了新型控制系统的状态选择组件。该功能的比例控制是通过在选择状态后继续监测肌电信号的 MAV 来实现的。该值被用作肢体功能所需速度的估计值。
图 10 展示了新控制方案正常运行期间,状态选择方案与比例控制相结合的一个典型例子。图 10(a) 是一段原始肌电信号,它导致在 T 时刻选择了状态 2,如图 10(c) 所示。时间 T, 是 MAV 超过 Von 阈值到状态被选择之间的时间延迟。这种状态选择延迟通常在 225 毫秒左右。为了避免快速的“突然开启”瞬变,比例输出信号通过一个 100 毫秒的移动平均窗口进行缓冲,该窗口最初被重置为零。这在比例信号中引入了一个斜坡,此后设备的速率与 MAV 成正比,如图 I(d) 所示。该图显示,状态保持在高位,直到图 I0(b) 中显示的 MAV 降至阈值 Voff 以下。此后,用户生成了另一个肌电模式,并由控制系统进行分类。这导致在 l2 时刻选择了另一个状态。
讨论
这种肌电控制方法的结果非常令人鼓舞。实验证明,神经网络分类器可以适应完整和截肢肌肉产生的各种肌电模式。受试者不需要以特定的力量、速度或持续时间来重现收缩,而是以一种既舒适又可重复的方式进行收缩。在神经网络的训练过程中,分类器能够适应每个受试者独特的肌电模式。在神经网络的初始训练之后,模式分类系统能够正确分类所呈现的70-98%的测试模式。值得注意的是,这种性能的实现并没有对用户进行任何训练。
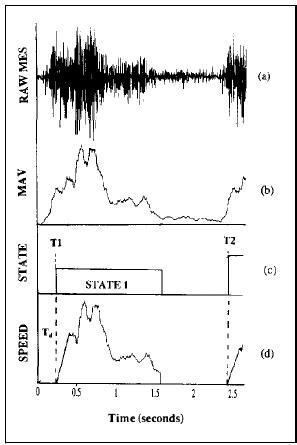
图 10。(a) 原始肌电信号。ib! 100 毫秒 MA 窗口的输出 (e) 控制系统输出状态 (ll 控制系统输出速度。(垂直刻度的任意单位。)
这些测试证实了基于神经网络的分类器的性能将不受特征值微小变化的影响。结果还表明,该网络可以不断适应模式类特征的变化。在某种程度上,图 7(b) 中显示的突变是最坏情况下的特征漂移。可以合理地假设,最常见的特征值变化将是缓慢变化的趋势,而不是突变。在这种情况下,输出误差可用于不断更新网络权重,以补偿这些趋势。这对于受试者训练尤其有用,在此期间,用户将更加熟练地使用控制系统。如果允许网络适应这些训练模式,它也将更能识别用户模式。这将允许用户采用一种舒适且高效的方法来生成所需的模式类,而不是强迫用户继续使用在不熟悉任务时使用的相同策略。
获取测试模式集需要用户生成大约40个独立的收缩动作,该测试模式集由每个收缩类别中的几个示例模式组成。在微型计算机上实现时,在测试模式上训练控制系统所需的时间通常少于5分钟。这相当于向神经网络展示大约100次测试模式集。网络训练时间取决于设备,对于更快的处理器来说会更短。这使得偶尔对控制系统进行重新训练是可行的。从200毫秒的采样数据中提取特征集所需的时间约为10毫秒。神经网络分类器的前馈计算大约需要10毫秒。这些值再次取决于设备。整体状态选择延迟小于250毫秒。这不会导致用户感知到的延迟。权重更新在函数停止后大约需要20毫秒。在此期间还增加了200毫秒的延迟,以确保肌电活动在系统重新启动之前已恢复到静止值。
截肢者和肢体健全的受试者已经使用基于微型计算机的系统来实现对台式电动肘和手假肢的比例控制。大多数受试者都取得了良好的性能。目前正在进行在专用微处理器(T1 TMS320C25)上实施该方案的工作,以用于临床试验。
结论
本文介绍了一种观察结果,即肌电信号在肌肉收缩的初始阶段并非随机的。在此阶段的信号结构中发现的信息提供了一种对不同收缩类型的模式进行分类的方法。这些信息被用作一种新型多功能肌电控制系统的基础。新的控制方案增加了可以通过单个肌电信号通道控制的功能数量,但这样做的方式不会增加截肢者所需的工作量。控制信号来源于自然的收缩模式,这些模式可以通过很少的主体训练可靠地产生。
研究还表明,可以使用人工神经网络来实现新的多功能控制策略,以对肌电模式进行分类。网络学习代表模式类的特征值的能力,为根据个体调整控制系统提供了一种方法。基于神经网络分类器的控制系统为用户提供了一种重新训练控制系统的方法,以保持系统性能的高度准确性。网络适应控制模式中等程度变化的能力也增强了系统性能。
虽然控制方案的开发是基于对肌电信号瞬时值中存在确定性结构的观察,但它并不要求这一点。它将利用任何可用的信息形式,无论是在信号的频率、幅度还是包络中。本研究中使用的许多特征是高度相关的。我们正在继续努力,以确定这些特征的子集是否可以提供类似的性能。同样,从多个肌电通道提取的特征可能会提高系统性能。还需要进一步的工作来为该系统的操作员定义一个合适的培训程序。需要大量的研究来确定这种控制方案的潜力。