“矿山”自动驾驶“路网”编辑功能实现
让数据真正闭环的L4级矿山自动驾驶仿真工具链-杭州千岑智能科技有限公司:RSim
矿山自动驾驶仿真系统的路网编辑功能实现面临独特的技术挑战,需要兼顾露天矿区的复杂地形与井下巷道的特殊环境约束。露天矿区需处理大坡度、坑洞地形,井下矿区需建模线性巷道和UWB定位节点,动态障碍物需支持矿卡与电铲的实时交互。通过分析现有路网编辑工具的功能特点,发现RSim在三维地形建模方面与动态场景编辑方面具有优势。最终集成方案采用混合架构,露天场景使用RSim处理三维渲染和传感器仿真,井下场景通过RSim建模巷道拓扑和UWB定位,两者通过ROS2接口或Protobuf协议同步路网数据和车辆状态,实现虚实互动测试和算法验证。

一、矿山路网的特殊性分析
矿山路网与普通城市道路存在显著差异,其特殊性主要体现在露天矿区与井下巷道两个不同的环境特点上。露天矿区道路设计遵循《厂矿道路设计规范》(GBJ22-87),包含技术等级划分、道路坡度限制、最小曲线半径和超高横坡等参数 。露天矿区道路的最大坡度范围尚不明确,但通常比普通道路大得多,且路面承受的荷载更大。在设计过程中需考虑电铲工作区域与卸载点的标高一致性,以及冬季防滑、粉尘防治等特殊养护需求。同时,露天矿区道路的视距要求更为严格,需清除弯道内侧的障碍物以减少盲区 。
井下巷道的结构特点与露天矿区截然不同。井下巷道通常可简化为一个由长、宽、高构成的长方体区域,宽度一般为3-5米,高度为2-4米。巷道网络由结点、节点、弧段和巷道线等基本元素组成,形成空间网格状的立体体系 。在井下巷道中,UWB定位系统需采用线性布局方式,锚节点沿巷道中线布置,定位精度可达0.3米。这种特殊的三维结构对路网编辑工具提出了更高要求,需支持巷道的线性布局、坡度限制和通信中断区域的标记。
矿山自动驾驶的关键要素包括高精度三维建模、动态拓扑维护、多传感器仿真支持、安全避障路径规划和多车协同调度 。露天矿区需处理大坡度、坑洞地形和动态障碍物(如重型机械移动路径),井下矿区则需考虑无GPS信号依赖替代方案(UWB、惯性导航)、粉尘和低光照干扰传感器以及固定路线和协同作业规则(如禁止超车) 。这些特殊需求使得传统的城市道路路网编辑工具难以直接应用于矿山场景,需要专门的定制化开发。
二、现有路网编辑工具的功能评估
VTD(Virtual Test Drive)是由德国VIRES公司开发的自动驾驶仿真工具,运行于Linux平台,功能覆盖道路环境建模、交通场景建模、天气和环境模拟等。其路网编辑器Road Network Editor (ROD)支持OpenDrive格式,但编辑矿山路网复杂度高,使用繁琐,二次开发能力弱。
SUMO是由德国国家宇航中心开发的开源微观交通流仿真软件 。其路网编辑器支持交互式编辑道路、车道连接关系和路口区域。SUMO的QarSUMO版本优化了交通流仿真效率,适合露天矿区的多车调度仿真。然而,SUMO在三维地形建模和动态障碍物交互方面存在不足,需结合点云数据导入和复杂脚本扩展才能满足矿山需求。露天矿区的陡坡和坑洞建模需依赖外部点云数据导入,操作复杂且缺乏开箱即用的解决方案。
RSim是杭州千岑智能推出的L4级自动驾驶仿真工具链,运行于Linux平台,采用混合架构,支持多用户协作与多任务管理。该平台功能包括,OpenDrive地图编辑、OpenScenario场景编辑、高保真场景渲染、物理级传感器仿真、高精度动力学、交通流仿真、算法可视化回放及分析等模块,并且RSim已经和中国头部矿山自动驾驶OEM深度合作。
综合评估,RSim在三维建模、实时更新和多传感器融合方面表现最佳,比较适合矿山场景的高精度需求。VTD存在编辑复杂度高、使用繁琐等问题,SUMO适合交通流仿真,但三维地形和动态障碍物建模能力不足。
三、矿山路网编辑功能的设计方案
针对矿山路网的特殊性,路网编辑功能应设计为三个核心模块:三维地形建模、道路拓扑编辑和动态障碍物添加。
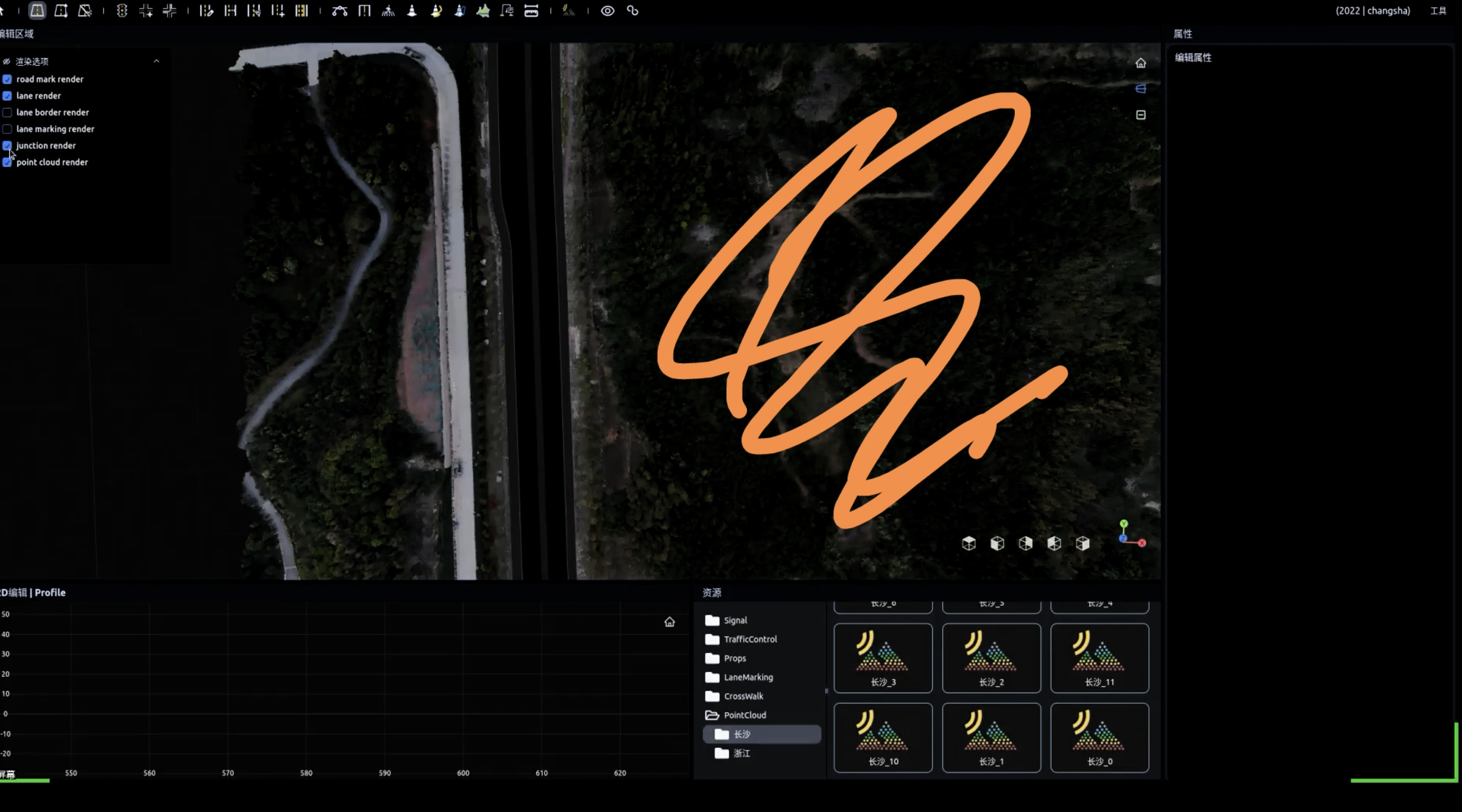
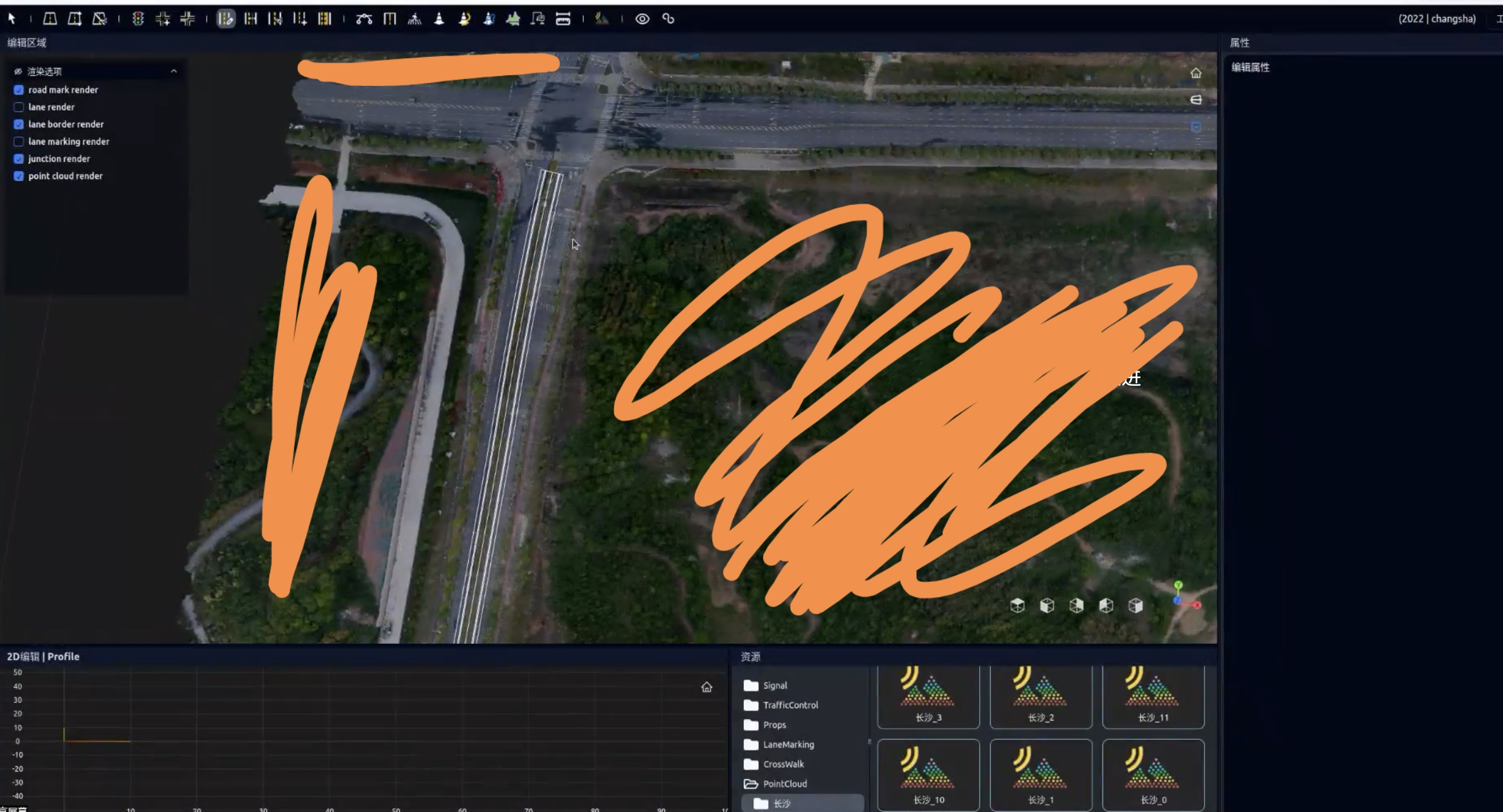
三维地形建模模块,应支持露天矿区的点云数据融合建模。露天矿区建模可采用矢量化技术,通过处理激光雷达、GNSS/IMU等多源传感器数据,自动提取道路、坡度、坑洞等要素并生成三维地图模型。该模块应支持高精度点云数据的导入与处理,能够处理矿山特有的陡坡、深坑等复杂地形特征。该模块还应支持地形的实时更新,以适应矿山环境的动态变化 。
道路拓扑编辑模块,应支持露天矿区的车道连接规则和布局逻辑。露天矿区编辑应集成《厂矿道路设计规范》参数(如最大坡度、最小曲线半径),通过OpenDrive格式导出 。该模块应允许用户设置道路的坡度、超高横坡(2%-6%,最高10%)和加宽处理,以满足矿山运输车辆的特殊需求。该模块还应支持道路的多工作面同时更新,满足大型矿山内多个工作区域的协同需求 。
动态障碍物添加模块,应支持矿卡与电铲的协同避让规则和通信中断响应。矿卡与电铲的避让事件可通过RSim的OpenScenario场景编辑器定义,设置避让优先级和路径规划规则。通信中断区域的标记应通过自定义属性字段在路网编辑器中实现,与仿真系统的中断注入功能关联。该模块还应支持动态障碍物的批量生成和参数配置,如障碍物类型(落石、临时路障)、尺寸和运动轨迹。露天矿区的动态障碍物可采用Voronoi图法或RRT*算法进行路径规划,提高避障安全性 。
四、路网编辑功能与仿真系统的集成方案
路网编辑功能与自动驾驶仿真系统的集成需解决数据接口、虚实互动机制和算法验证流程三个核心问题。基于矿山场景的特殊需求,建议采用混合仿真架构,结合不同工具的优势。
数据接口与格式转换,是集成的第一步。露天矿区路网可通过采集处理,生成OpenDrive格式文件,导入RSim进行三维渲染和传感器仿真。

虚实互动机制 设计是集成的关键环节。露天矿区的实时地形更新可通过云服务器,通过WebSocket推送路网变更,RSim的Python脚本监听并触发地图重载 。为减少延迟,可采用增量更新策略,仅更新发生变化的区域。虚实互动测试可利用5G网络将实车传感器数据传输至仿真系统,用于验证算法在真实地形中的表现。同时,仿真系统的决策结果可通过ROS2发布至实车,形成测试闭环。
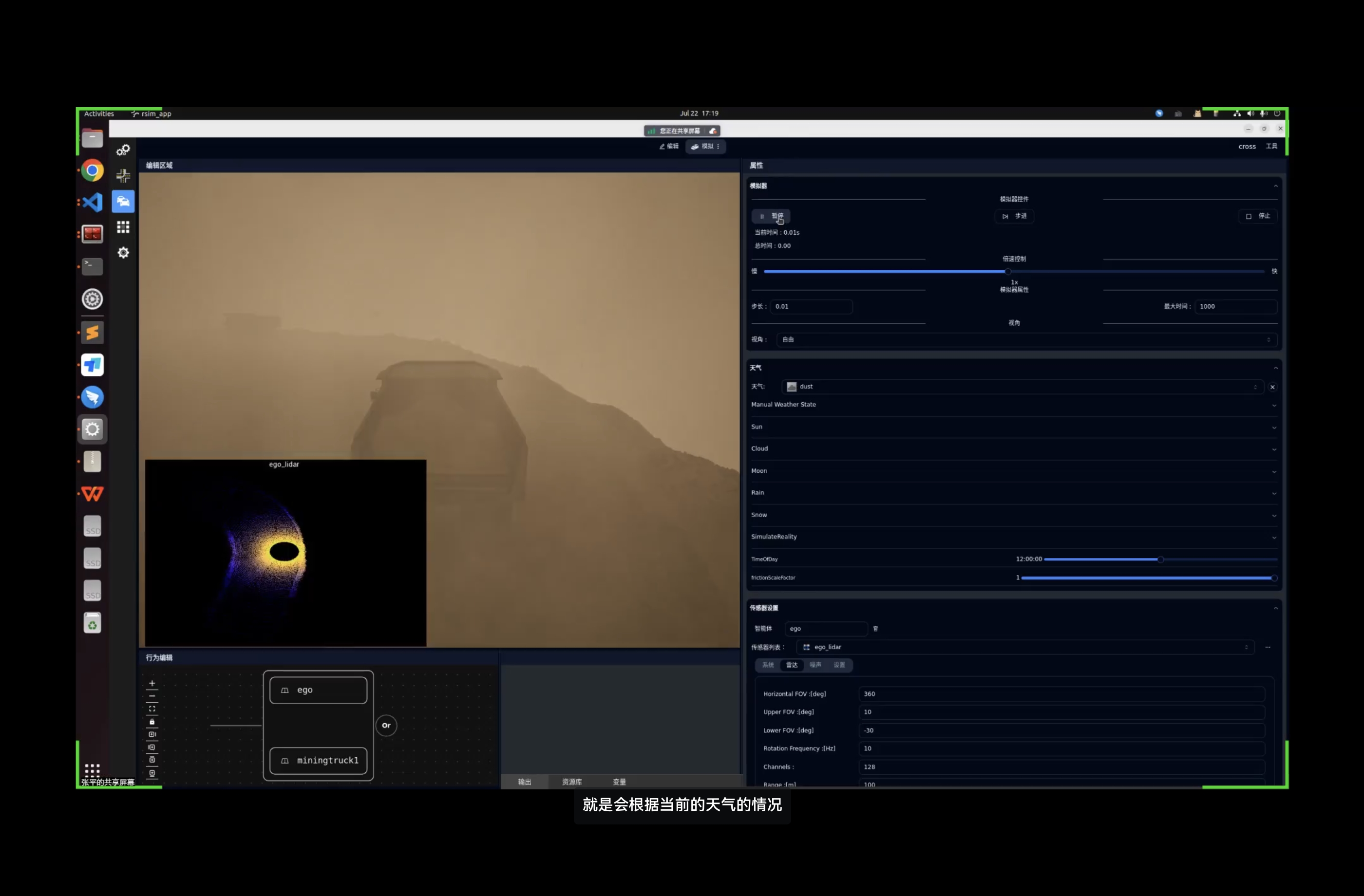
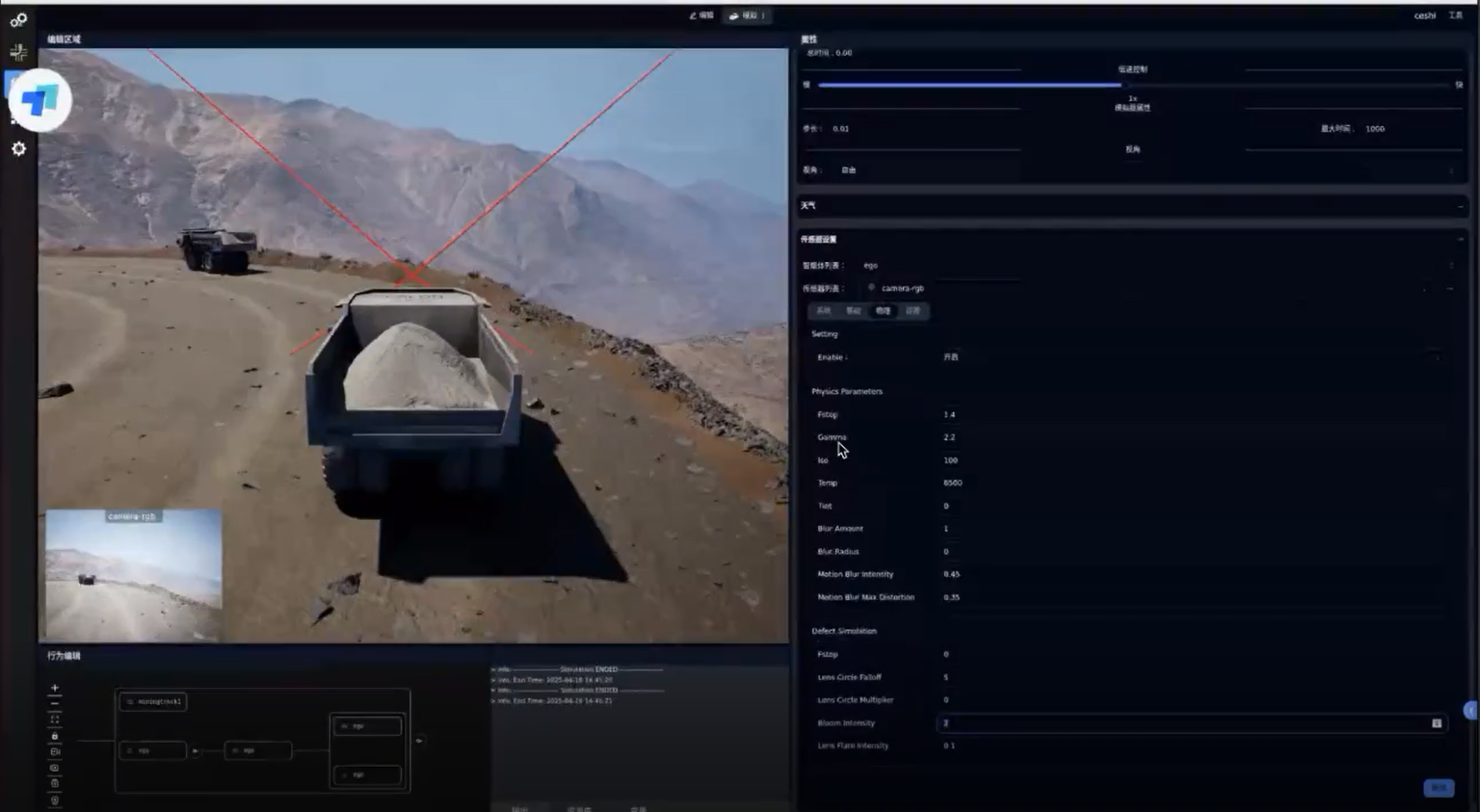
算法验证流程,需设计为支持矿山场景的特殊需求。露天矿区验证应包括大坡度行驶、坑洞避障和动态障碍物协同避让等场景 。可通过RSim开发自定义测试用例,模拟不同坡度、障碍物密度和天气条件,配置不同定位误差和通信中断概率,测试自动驾驶算法的鲁棒性以及多车协同调度验证,模拟不同交通密度和车辆类型下的协同作业 。

 五、典型应用场景与实现路径
五、典型应用场景与实现路径
矿山自动驾驶仿真系统的路网编辑功能可应用于多个典型场景,包括露天矿区的动态地形适应和井下巷道的协同作业验证。
露天矿区动态地形适应场景 的实现路径如下:首先,使用无人机倾斜摄影和激光雷达扫描获取矿区三维点云数据。然后,通过算法自动提取道路、坡度、坑洞等特征并生成三维地图模型。接着,将地图导出为OpenDrive格式,导入RSim进行三维渲染和传感器仿真。在仿真中,可模拟不同坡度、障碍物密度和天气条件,测试自动驾驶算法的适应能力。最后,通过RSim开发自定义测试用例,实现算法的自动化验证和优化。该场景的关键技术是点云数据的自动处理和地形特征的准确提取,以及仿真系统的实时响应能力。
多工作面协同调度场景的实现路径如下:首先,通过RSim构建露天矿区路网模型。然后,利用ROS2接口将场景的数据同步至统一的调度管理平台。接着,在仿真中模拟不同工作区域的交通状态和作业需求,测试多车协同调度策略的性能。最后,通过RSim开发自定义测试用例,实现算法的自动化验证和优化。该场景的关键技术是多工作面数据的统一管理和协同调度策略的验证,以及不同仿真工具之间的数据同步。
六、未来发展趋势与优化方向
矿山路网编辑功能实现的未来发展趋势主要集中在标准化、智能化和全球化三个方向。
标准化趋势,体现在行业标准的逐步完善和工具兼容性的提升上。目前矿山自动驾驶路网编辑尚未形成专项标准,但可参考ISO 17757的数字地图(DTM)、自动驾驶作业区(AOZ)等概念,结合SAE L4级要求设计功能。未来随着行业标准的完善,路网编辑工具将更加规范化,支持更多矿山特有的属性字段和交互规则。同时,OpenDrive、OpenScenario等开放格式将扩展支持矿山场景,降低工具间的兼容成本 。
智能化趋势,体现在AI算法的深度集成和自动化程度的提升上。当前RSim已采用AI算法自动提取地形特征,未来将进一步提升自动化水平,实现从点云数据到三维地图的全流程自动化。同时,AI算法将应用于动态障碍物的预测和避让路径的生成,提高仿真系统的智能水平。此外,AI大模型技术将与仿真系统结合,支持更复杂的场景生成和算法验证。
全球化扩展趋势,体现在跨区域协同和多语言支持上。随着矿山自动驾驶技术的全球化应用,路网编辑工具需支持不同国家的矿山标准和设计规范。同时,多语言界面和文档将降低国际用户的使用门槛。此外,全球化扩展还需考虑不同地区的通信基础设施和传感器性能差异,提供针对性的仿真支持。
优化方向主要包括以下几点:一是提升实时更新能力,减少地图重载的延迟,提高仿真系统的响应速度 ;二是增强传感器干扰模型,支持更复杂的粉尘、低光照和通信中断场景的模拟 ;三是优化多工作面协同机制,提高大型矿山场景的仿真效率和精度 ;四是加强与自动驾驶算法的集成,提供更便捷的算法验证和优化工具 。
七、结论与建议
矿山路网编辑功能实现是一项复杂而重要的技术挑战,需要综合考虑露天矿区的特殊需求,选择合适的工具并设计合理的集成方案。
结论,表明,矿山路网编辑功能实现需采用混合架构,露天矿区使用RSim处理三维渲染和传感器仿真,而且在三维建模和实时更新方面表现最佳,可作为露天矿区路网编辑的核心工具。RSim的OpenScenario编辑器在动态场景编辑和传感器仿真方面具有优势。
建议,包括以下几点:一是优先采用RSim作为核心工具,处理露天矿区路网编辑;二是开发自定义中间件处理不同格式之间的转换和数据同步,降低工具间的兼容成本;三是加强与自动驾驶算法的集成,提供更便捷的算法验证和优化工具;四是关注行业标准的完善和AI技术的发展,持续优化路网编辑功能;五是加强国际合作,推动矿山自动驾驶技术的全球化应用。
矿山路网编辑功能实现是矿山自动驾驶技术的重要支撑,通过不断优化和创新,将加速矿山ADS规模化商业落地,推动矿山智能化、信息化和绿色化转型。
