使用 ROS2 构建客户端-服务器通信:一个简单的计算器示例
本指南将详细介绍如何创建两个 ROS2 Python 节点(一个客户端和一个服务器),通过发布/订阅机制实现相互通信,完成数字计算请求与结果返回的功能。我们将使用 std_msgs/String 消息类型来传递数据。
1. 创建 ROS2 Python 包
首先,使用 ros2 pkg create 命令创建两个独立的 Python 包,分别用于客户端和服务器。
# 创建客户端包
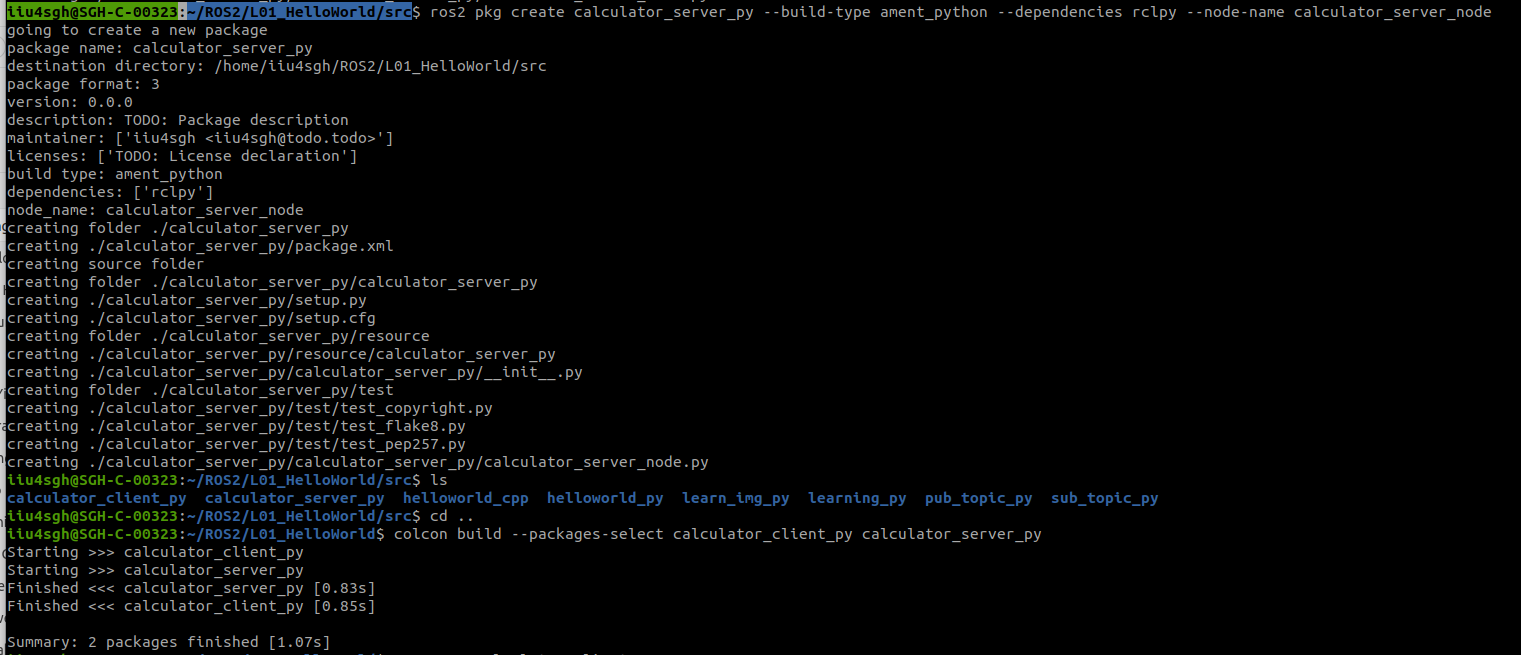
ros2 pkg create calculator_client_py \--build-type ament_python \--dependencies rclpy \--node-name calculator_client_node# 创建服务器包
ros2 pkg create calculator_server_py \--build-type ament_python \--dependencies rclpy \--node-name calculator_server_node
命令选项说明:
--build-type ament_python:指定该包为 Python 包,并使用 ament 构建系统。--dependencies rclpy:声明依赖rclpy库,这是 Python 版本的 ROS2 客户端库。--node-name:在包内创建一个名为calculator_client_node.py或calculator_server_node.py的基础节点文件。
2. 实现客户端节点 (calculator_client_node.py)
客户端负责接收用户输入,将计算请求(两个数字和一个运算符)打包成字符串消息,并发布到 calculation_request 话题。同时,它订阅 calculation_response 话题以接收服务器的计算结果。
[calculator_client_node.py]
#!/usr/bin/env python3import rclpy
from rclpy.node import Node
from std_msgs.msg import Stringclass CalculatorClient(Node):def __init__(self):super().__init__('calculator_client')# 创建发布者,发布请求到 'calculation_request' 主题self.publisher_ = self.create_publisher(String, 'calculation_request', 10)# 创建订阅者,订阅来自 'calculation_response' 主题的响应self.subscription = self.create_subscription(String,'calculation_response',self.listener_callback,10)self.subscription # 防止未使用变量警告def listener_callback(self, msg):# 回调函数:当收到计算结果时被调用self.get_logger().info(f'Received result: {msg.data}')def send_request(self, num1, operator, num2):# 发送请求函数msg = String()# 格式: "num1,operator,num2"msg.data = f"{num1},{operator},{num2}"self.publisher_.publish(msg)self.get_logger().info(f'Sent request: {num1} {operator} {num2}')def main(args=None):rclpy.init(args=args)calculator_client = CalculatorClient()print("Supported operations: +, -, *, /")try:while rclpy.ok():# 获取用户输入user_input = input("Enter calculation (e.g., '3 + 5') or 'exit' to quit: ")if user_input.lower() == 'exit':breaktry:parts = user_input.split()if len(parts) != 3:print("Invalid input format. Please use 'number operator number'.")continuenum1_str, operator, num2_str = parts# 验证运算符if operator not in ['+', '-', '*', '/']:print(f"Unsupported operator '{operator}'. Please use +, -, *, or /.")continue# 尝试转换为浮点数num1 = float(num1_str)num2 = float(num2_str)# 发送请求calculator_client.send_request(num1, operator, num2)except ValueError:print("Invalid input. Please ensure numbers are valid.")continue# 旋转一次以处理可能的回调rclpy.spin_once(calculator_client, timeout_sec=0.1)except KeyboardInterrupt:print("\nShutting down client...")finally:calculator_client.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()3. 实现服务器节点 (calculator_server_node.py)
服务器节点订阅 calculation_request 话题。当收到请求时,它解析消息,执行计算,并将结果(或错误信息)发布到 calculation_response 话题。
[calculator_server_node.py]
#!/usr/bin/env python3import rclpy
from rclpy.node import Node
from std_msgs.msg import Stringclass CalculatorServer(Node):def __init__(self):super().__init__('calculator_server')# 创建订阅者,订阅 'calculation_request' 主题的请求self.subscription = self.create_subscription(String,'calculation_request',self.listener_callback,10)self.subscription # 防止未使用变量警告# 创建发布者,发布响应到 'calculation_response' 主题self.publisher_ = self.create_publisher(String, 'calculation_response', 10)def listener_callback(self, msg):# 回调函数:当收到计算请求时被调用try:# 解析收到的数据 "num1,operator,num2"data_str = msg.datanum1_str, operator, num2_str = data_str.split(',')num1 = float(num1_str)num2 = float(num2_str)# 执行计算if operator == '+':result = num1 + num2elif operator == '-':result = num1 - num2elif operator == '*':result = num1 * num2elif operator == '/':if num2 == 0:raise ZeroDivisionError("Division by zero is not allowed.")result = num1 / num2else:# 这在客户端已经检查过,但作为服务端健壮性考虑raise ValueError(f"Unsupported operator: {operator}")# 准备并发布响应response_msg = String()response_msg.data = f"{num1} {operator} {num2} = {result}"self.publisher_.publish(response_msg)self.get_logger().info(f'Processed request: {num1} {operator} {num2} = {result}')except ValueError as e:# 处理解析错误或不支持的运算符error_msg = String()error_msg.data = f"Error: Invalid request data '{msg.data}'. Details: {e}"self.publisher_.publish(error_msg)self.get_logger().warn(f'Failed to process request: {msg.data}. Error: {e}')except ZeroDivisionError as e:# 处理除零错误error_msg = String()error_msg.data = f"Error: {e}"self.publisher_.publish(error_msg)self.get_logger().warn(f'Calculation error for request: {msg.data}. Error: {e}')except Exception as e: # 捕获其他未预期的错误error_msg = String()error_msg.data = f"Unexpected error occurred: {e}"self.publisher_.publish(error_msg)self.get_logger().error(f'Unexpected error processing request: {msg.data}. Error: {e}')def main(args=None):rclpy.init(args=args)calculator_server = CalculatorServer()try:print("Calculator server is running... Waiting for requests.")# 保持节点运行,等待消息rclpy.spin(calculator_server)except KeyboardInterrupt:print("\nShutting down server...")finally:calculator_server.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()Additional Notes:
- The created node will need manual modification to implement the actual calculator service logic
- After creation, you would typically:
- Edit the node file to implement service callbacks
- Add message/service dependencies if needed
- Build with
colcon build- Source the workspace
- Run with
ros2 run calculator_server_py calculator_server_node
4. 构建与运行
构建包:
colcon build --packages-select calculator_client_py calculator_server_py激活环境:
source install/setup.bash启动节点:
- 在一个终端中启动服务器(必须先启动):
ros2 run calculator_server_py calculator_server_node- 在另一个终端中启动客户端:
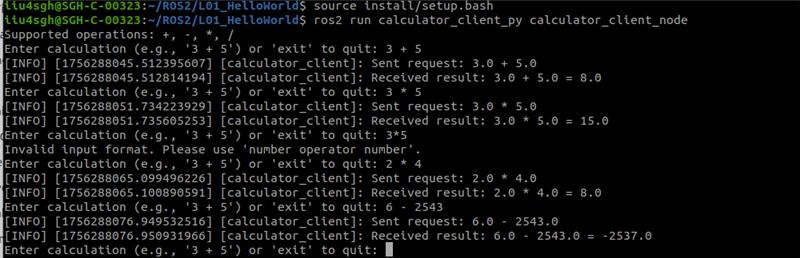
ros2 run calculator_client_py calculator_client_node
交互: 在客户端终端输入类似
3 + 5的表达式,服务器会计算并将结果返回,客户端会显示结果。
启动客户端Node
启动服务端Node
