AI算力提升7.5倍!英伟达发布新一代机器人超级计算机Jetson Thor,驱动物理AI革命
今天,NVIDIA 宣布其专为物理 AI 和机器人打造的新一代机器人计算机 Jetson Thor 正式发售。其中,Jetson AGX Thor 开发者套件售价为 3499 美元(约合人民币 2.5 万元)。
NVIDIA 创始人兼首席执行官黄仁勋表示:“Jetson Thor 专为全球数百万开发者打造,助力他们构建可与物理世界交互、甚至改变物理世界的机器人系统。它具备无与伦比的性能与能效,还能够在边缘设备上同时运行多个生成式 AI 模型。作为一款卓越的超级计算机,Jetson Thor 正致力于推动物理 AI 与通用机器人时代真正到来。”
Jetson Thor 采用英伟达Blackwell GPU架构,配备14核Arm Neoverse CPU和 128GB 显存,显存带宽达到 273GB/s。
在 FP4 精度下,这款设备的 AI 峰值算力高达 2070 TFLOPS,即使在 FP8 精度下也能达到 1035 TFLOP,能够在边缘设备上高效运行生成式AI和大型 Transformer 模型。

与上一代 Jetson Orin 相比,Jetson Thor 实现了 7.5 倍的 AI 计算性能提升,能效提高 3.5 倍,CPU 性能提升 3.1 倍,I/O 吞吐量更是大幅提升 10 倍。

作为专为物理 AI 和人形机器人设计的超级计算机,Jetson Thor 能够支持多种生成式 AI 模型,包括视觉语言动作模型、大语言模型和视觉语言模型。它能够处理实时视频数据流和 AI 推理,适用于构建能够在边缘执行视觉搜索和总结任务的 AI 智能体。
同时,其功耗配置也非常灵活,整个计算机的功率可在 40W 到 130W 之间调整,适应不同的应用场景需求。借助 4 个 25GbE 网络、摄像头卸载引擎和 Holoscan 传感器桥接器,Jetson Thor 能够高效提取高速传感器数据,保证实时性能。
实际性能表现
在并行处理 16 个传感器输入时,运行 Llama 3B 和 Qwen 2.5 VL 3B 模型,Jetson Thor 生成第一个 token 的时间在 200ms 内,输出每 token 的时间在 50ms 内。
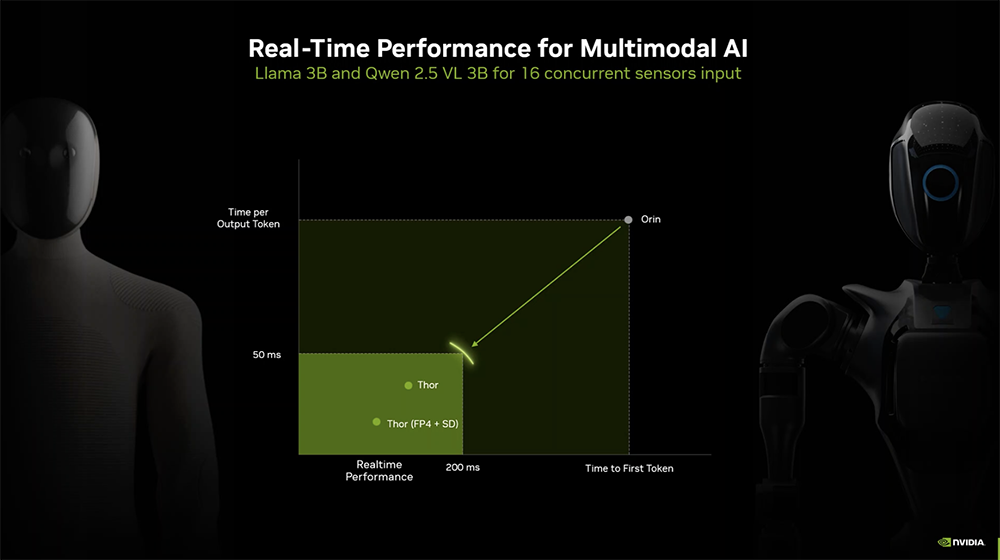
这意味着运行这些模型可以每秒生成超过 25 个token,相比前代产品实现了翻倍提升。
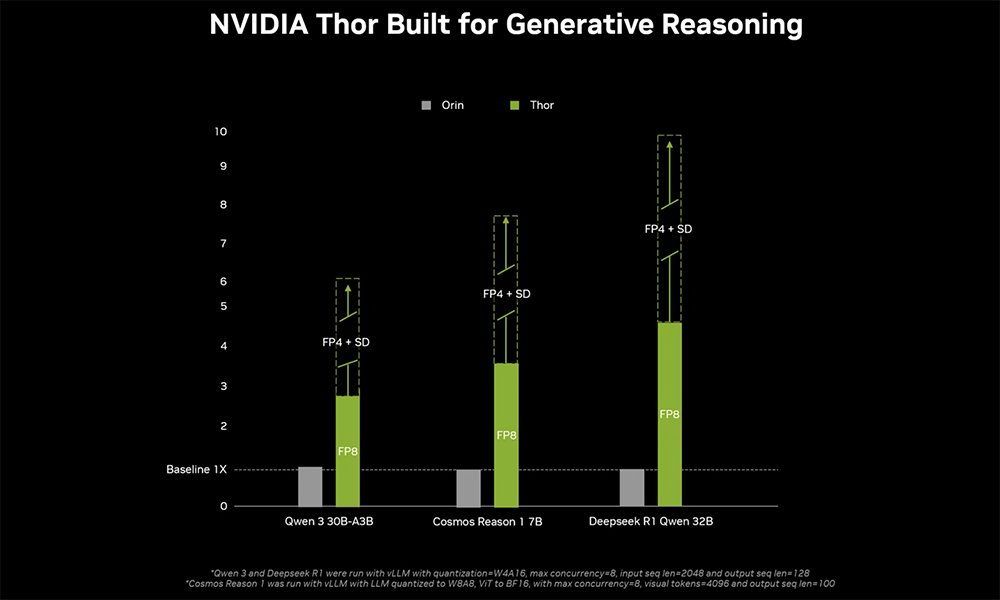
对于通用推理任务,Jetson Thor 运行阿里 Qwen 3-30B-A3B 等推理模型时,在 FP8 精度下性能提升多达 3 到 5 倍,FP4 精度下更是提升高达 10 倍。
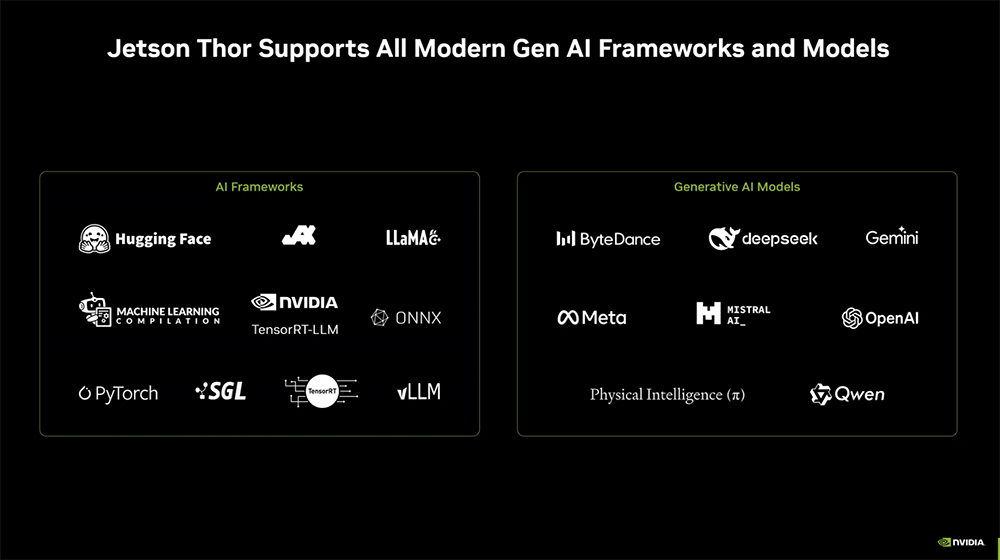
Jetson Thor 与英伟达机器人 AI 软件平台完美搭配,支持所有主流 AI 框架,以及多家企业的生成式 AI 模型。
它完全兼容英伟达从云到边缘的软件栈,包括用于机器人仿真和开发的 Isaac 平台、Isaac GR00T 人形机器人基础模型、用于视觉 AI 的 NVIDIA Metropolis 等。
众多企业已经率先采用 Jetson Thor,包括联影医疗、万集科技、优必选、银河通用、宇树科技、众擎机器人和智元机器人等。
英伟达机器人与边缘 AI副总裁 Deepu Talla 提出,要真正实现物理AI和机器人,需要三台计算机协同工作。
第一台是用来训练 AI 的 DGX系统,第二台是用来在仿真环境中测试 AI 的 Omniverse 平台,第三台才是装在机器人身上的大脑,也就是 Jetson Thor。
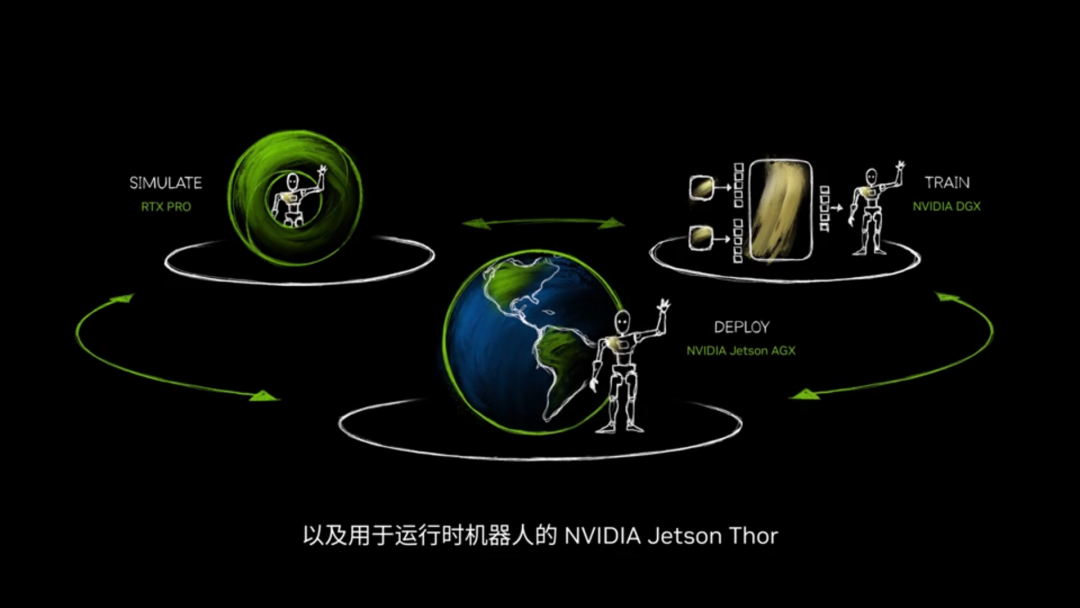
仿真测试这一步至关重要,因为仿真相比在真实物理环境中开发更快、更安全、更便宜。即使机器人部署到现场后,训练-仿真-部署的循环还会持续进行,不断升级机器人能力。
黄仁勋多次强调,AI 的下一波浪潮是物理 AI,也就是具备环境感知、实时推理与物理交互能力的系统。
当前,物理 AI 正在撬动机器人产业的爆发式增长。
随着 Jetson Thor 平台被越来越多机器人公司采用,物理 AI 正逐渐从概念走向现实。机器人将在工业制造、医疗健康、家庭服务等多个领域发挥更大作用,改变人类与物理世界交互的方式。
而在物理 AI 与通用机器人时代真正来临的进程中,算力作为核心引擎,至关重要。没有强大的边缘算力支撑,物理 AI 就无法从理论走向实践应用。
也正是 Jetson Thor 的巨量算力突破,使得机器人能够处理更复杂的多模态数据输入,进行更精准的实时推理决策,执行更精细的物理交互操作。
未来,算力的持续提升将直接决定物理 AI 系统的能力上限和发展速度,为机器人在工业制造、医疗健康、家庭服务等领域的广泛应用提供坚实基础。
从云计算到边缘计算,算力的全面升级正在推动整个物理 AI 领域向前迈进,为构建真正智能、实用的机器人产品提供决定性支撑。