d435i深度相机使用
1.官方软件Intel RealSense Viewer v2.55.1
相机工作画面展示:
3D
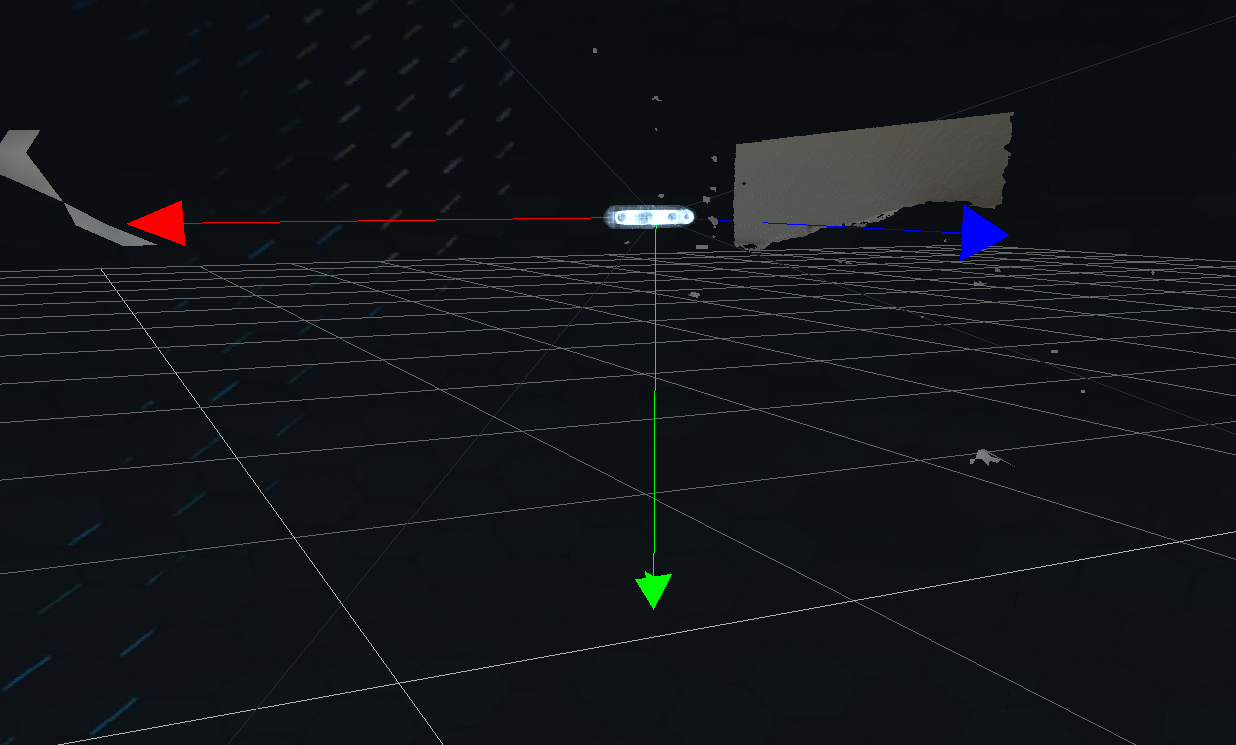
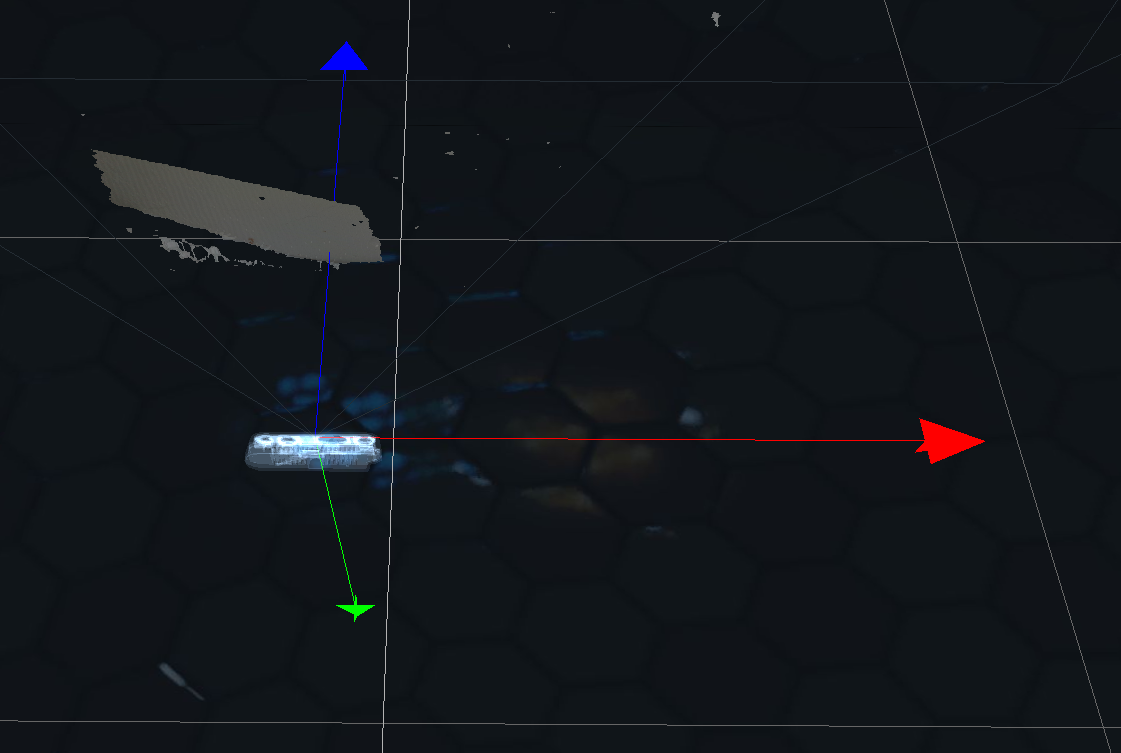
红色箭头:X轴
绿色箭头:Y轴
蓝色箭头:Z轴
当相机镜头垂直于墙壁时:
相机镜头前方为 Z轴正方向,
相机粗螺纹接口所在方向(当相机镜头垂直墙壁,相机垂直地面的下方)为Y轴正方向
相机数据通信接口(矩形接口)处,(从相机背面看,相机的右侧)为X轴正方向。
2D

在相机2D工作界面,显示四个图
左上角:深度图,右边竖栏表示从0m(蓝色)到4m(深红色)
左下角:彩色图片
右上角:
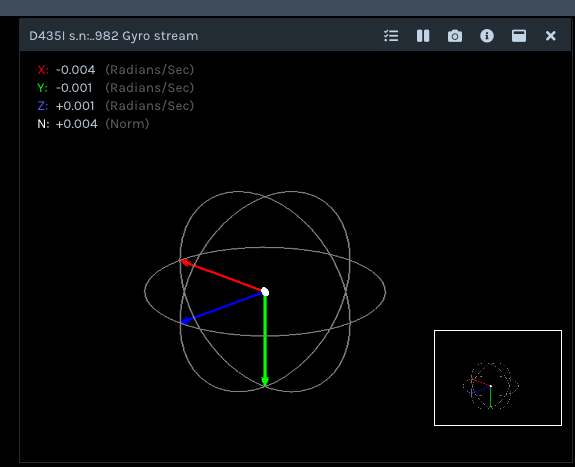
gyro stream 陀螺流
radians/sec 弧度/秒
右下角
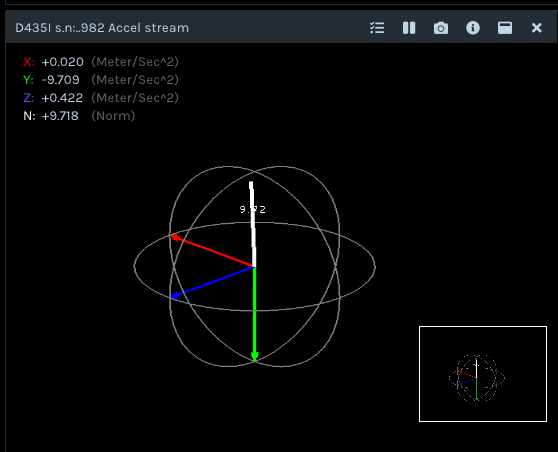
accel stream 加速流
meter/sec^2 米/平方秒