2021年ASOC SCI2区TOP,改进遗传算法+自主无人机目标覆盖路径规划,深度解析+性能实测
目录
- 1.摘要
- 2.问题定义与模型
- 3.提出算法
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
近年来,无人机(UAV)已广泛应用于军事与民用任务,其中许多任务的核心目标是完成任务空间内的既定点位覆盖。然而,随着检查点数量和约束条件的增加,路径规划的计算复杂度显著提高,传统方法往往难以及时获得可行解。本文针对自主无人机的目标覆盖路径规划问题,引入遗传算法(GA)、蚁群算法(ACO)、Voronoi 图以及聚类方法等智能算法,并提出对 GA 初始种群的优化策略,以加快收敛速度。利用 ACO 生成次优路径作为初始个体的参考,将 Voronoi 图顶点引入为附加航路点,以规避危险区域;采用聚类中心生成 Voronoi 顶点,作为补充航路点;根据潜在碰撞点提取聚类中心,作为关键引导点。
2.问题定义与模型
无人机路径规划在满足运动学与安全约束的条件下,寻找从位置pip_ipi到目标pi+1p_{i+1}pi+1的最优路径,优化目标是最小化总飞行距离。
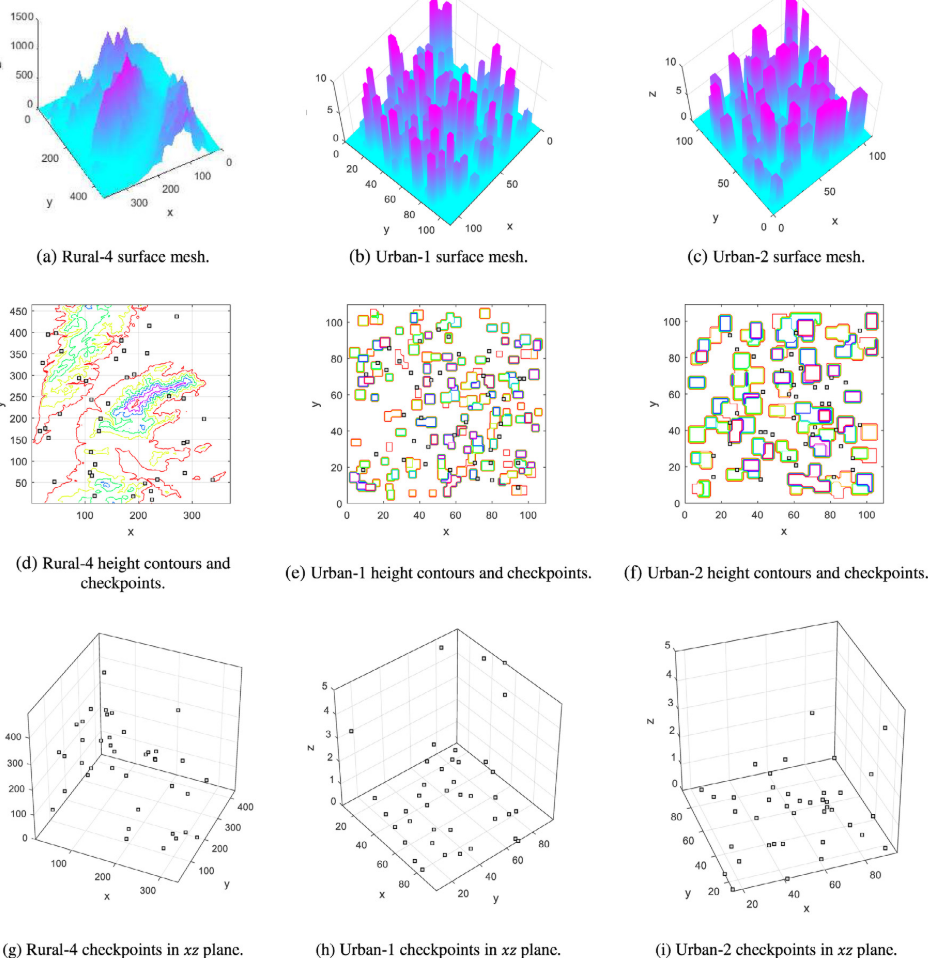
地形建模
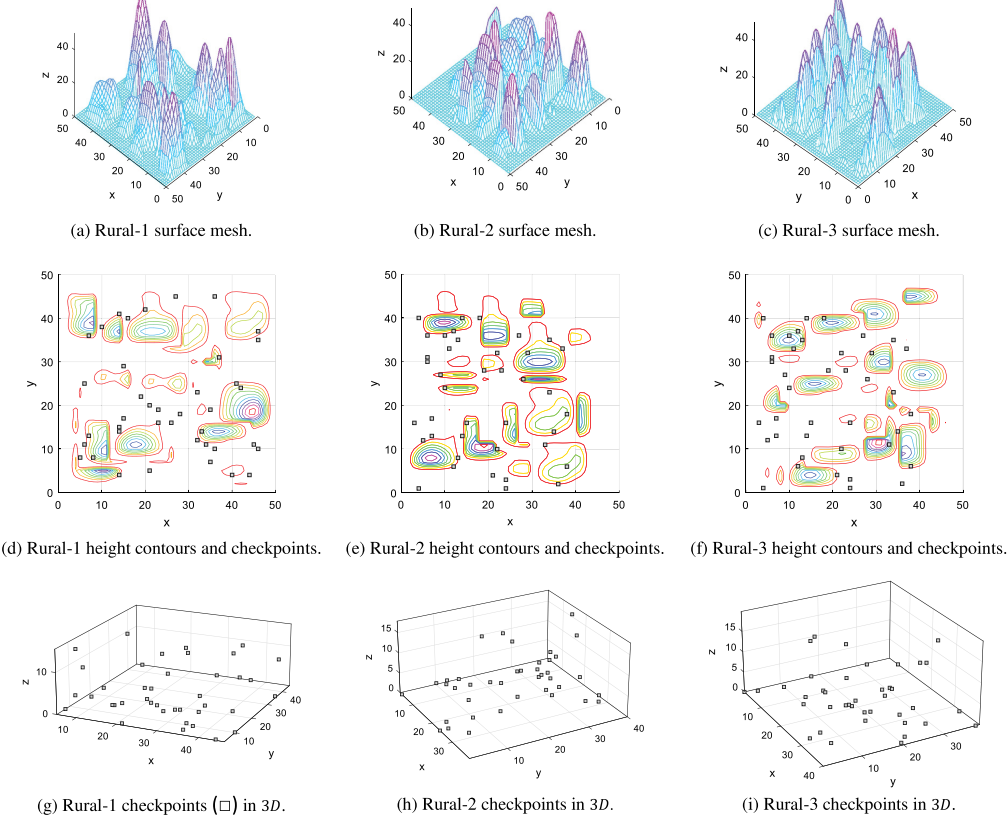
在农村地区使用 Bezier 曲面参数函数和基于空间数据的地形表示方法,三维 Bezier 曲面:
xs(u,v)=∑i=0n∑j=0mBn,i(u)Bm,j(v)x(i,j)x_s(u,v)=\sum_{i=0}^n\sum_{j=0}^mB_{n,i}(u)B_{m,j}(v)x(i,j) xs(u,v)=i=0∑nj=0∑mBn,i(u)Bm,j(v)x(i,j)
ys(u,v)=∑i=0n∑j=0mBn,i(u)Bm,j(v)y(i,j)y_s(u,v)=\sum_{i=0}^n\sum_{j=0}^mB_{n,i}(u)B_{m,j}(v)y(i,j) ys(u,v)=i=0∑nj=0∑mBn,i(u)Bm,j(v)y(i,j)
zs(u,v)=∑i=0n∑j=0mBn,i(u)Bm,j(v)z(i,j)z_s(u,v)=\sum_{i=0}^n\sum_{j=0}^mB_{n,i}(u)B_{m,j}(v)z(i,j) zs(u,v)=i=0∑nj=0∑mBn,i(u)Bm,j(v)z(i,j)
其中,
Bn,i(u)=n!i!(n−i)!ui(1−u)n−iB_{n,i}(u)=\frac{n!}{i!(n-i)!}u^i(1-u)^{n-i} Bn,i(u)=i!(n−i)!n!ui(1−u)n−i
Bm,j(v)=m!j!(m−j)!vj(1−v)m−jB_{m,j}(v)=\frac{m!}{j!(m-j)!}v^j(1-v)^{m-j} Bm,j(v)=j!(m−j)!m!vj(1−v)m−j
这里xs(u,v),ys(u,v),zs(u,v)x_s(u,v),y_s(u,v),z_s(u,v)xs(u,v),ys(u,v),zs(u,v)为曲面点坐标,x(i,j),y(i,j),z(i,j)x(i,j),y(i,j),z(i,j)x(i,j),y(i,j),z(i,j)为曲面控制点坐标。
城市区域地形模型可通过生成具有不同位置和高度的矩形棱柱来实现,这些棱柱模拟城市建筑及其分布,高度随机生成:
[x1,ix2,i]T=[rand[x1L,x1U]rand[x2L,x2U]]\begin{bmatrix} x_{1,i} & x_{2,i} \end{bmatrix}^T= \begin{bmatrix} rand\left[x_1^L,x_1^U\right] \\ rand\left[x_2^L,x_2^U\right] \end{bmatrix} [x1,ix2,i]T=[rand[x1L,x1U]rand[x2L,x2U]]
目标分布
由于路径规划的连续性,nTn_{T}nT个目标点会产生海量解空间。为降低复杂度,通常将大目标簇划分为含 40–50 个目标的子簇。
常用UAV目标函数,不赘述。
3.提出算法
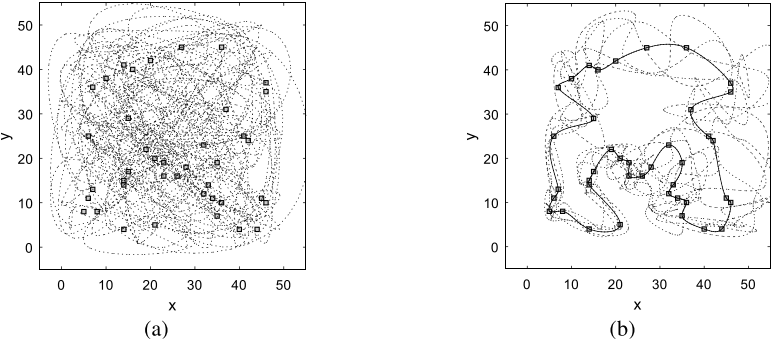
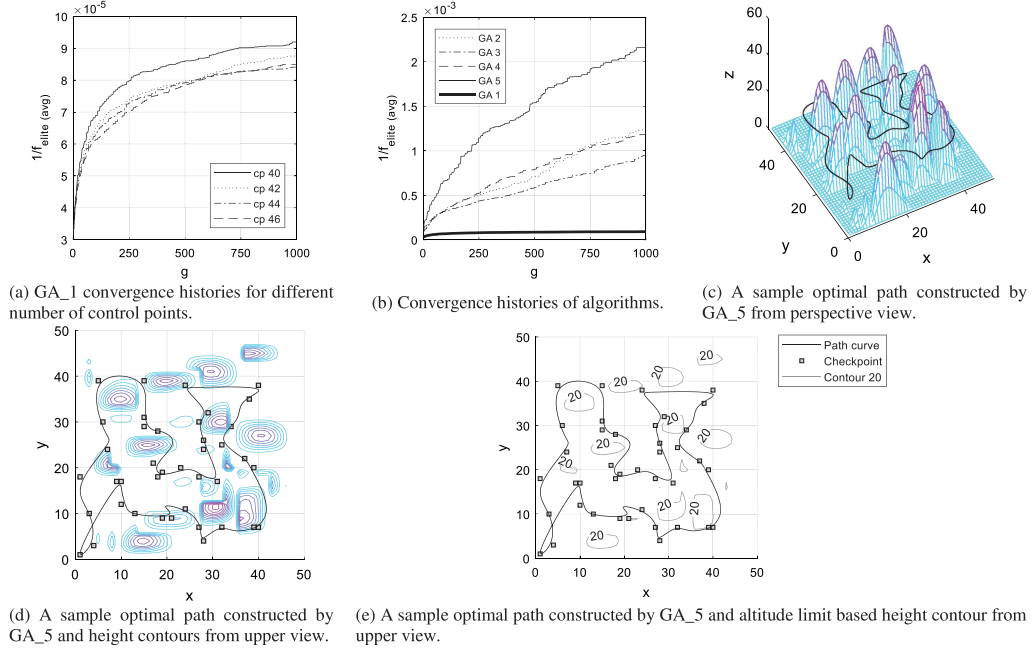
针对自主无人机在目标覆盖任务中的路径规划问题,本文提出了五种改进方法。
- GA1:随机控制点生成初始种群并通过遗传算法迭代优化,形成基准方法;
- GA2:引入蚁群算法改进初始种群,通过将检查点直接作为样条曲线的控制点;
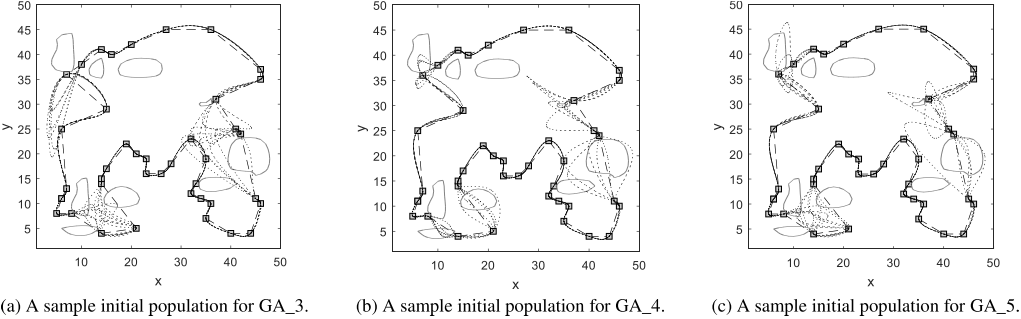
- GA3:Voronoi 图的顶点作为附加航路点;
- GA4:利用部分聚类中心作为附加航路点;
- GA5:将与路径曲线发生碰撞的地形点集的聚类中心作为附加航路点。
GA1算法

GA2算法
除了初始种群不同,GA2算法与GA1相似。GA2的初始种群可以通过使用正则化检查点来生成:
xi,j,1=xj,1ACO[1+amp⋅(0.5−rand)]x_{i,j,1}=x_{j,1}^{ACO}\left[1+amp\cdot(0.5-rand)\right] xi,j,1=xj,1ACO[1+amp⋅(0.5−rand)]
xi,j,2=xj,2ACO[1+amp⋅(0.5−rand)]x_{i,j,2}=x_{j,2}^{ACO}\left[1+amp\cdot(0.5-rand)\right] xi,j,2=xj,2ACO[1+amp⋅(0.5−rand)]
GA3算法
GA3与 GA1 的差异在于初始种群的生成方式,其结合了蚁群算法产生的检查点和
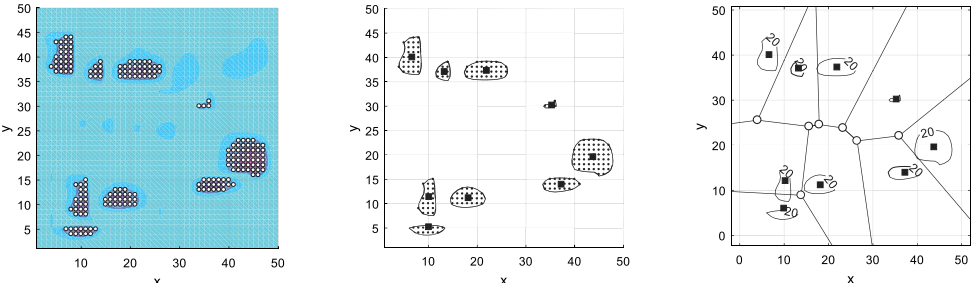
Voronoi 图的附加航路点。因此,需通过过滤与聚类提取安全航点。过滤过程根据无人机升限剔除超高地形点,形成危险点集SfS_{f}Sf。随后利用模糊C均值(FCM)方法对SfS_fSf聚类得到聚类中心作为候选附加航点,从而在保证覆盖性的同时提升飞行路径的安全性。
聚类中心被视为地形威胁点,可借助 Voronoi 图寻找其周围的安全路径。Voronoi 图通过点集间的垂直平分线将平面划分为区域,每个区域对应离某点最近的范围。区域间的公共边为 Voronoi 边,其端点为 Voronoi 顶点。基于聚类中心生成的 Voronoi 边与顶点可作为候选航路点,从而提高路径规划的安全性。
GA4算法
GA4 与 GA3 的差异在于初始种群生成方式:它结合 ACO 生成的检查点和 类型 1 聚类中心作为附加航路点,而无需构建 Voronoi 图。当路径在相邻控制点间出现碰撞时,将距离碰撞点最近的聚类中心插入为新的控制点。
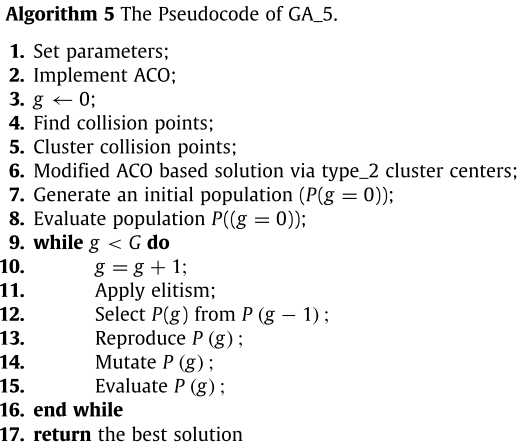
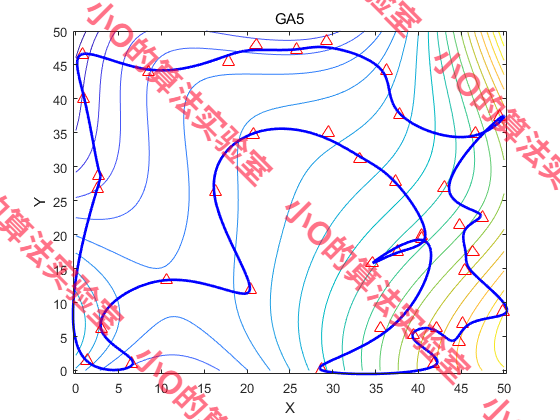
GA5算法
GA5 在初始种群构建上与 GA4 不同,其附加航路点来源于碰撞点聚类中心。当相邻控制点间路径与地形发生碰撞时,先提取样条曲线上的碰撞点,再基于这些点生成聚类中心,并将其作为新的控制点。
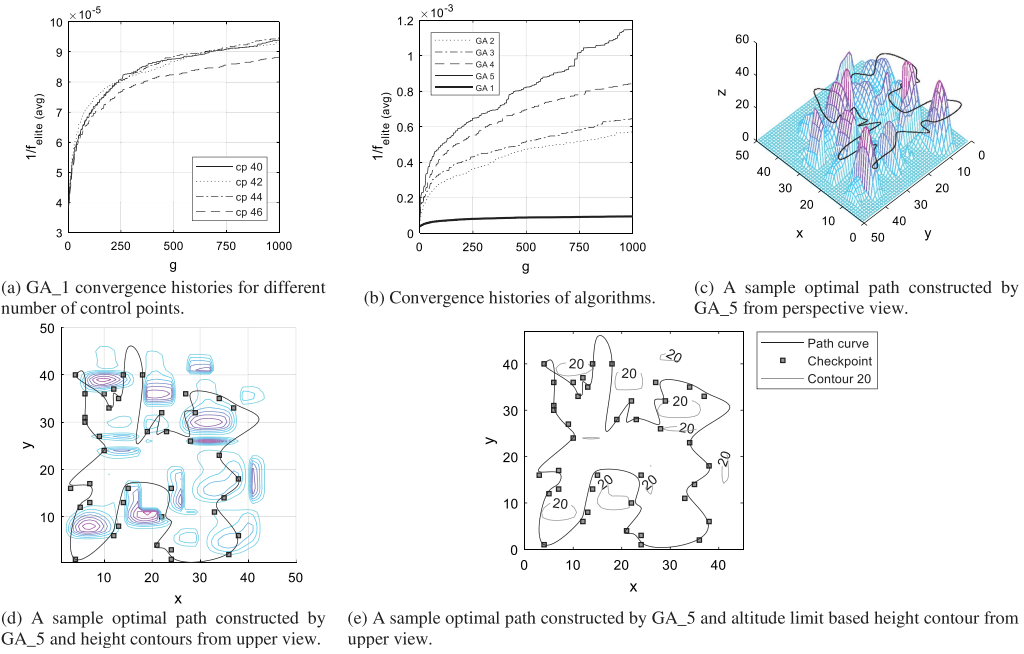
4.结果展示
5.参考文献
[1] Pehlivanoglu Y V, Pehlivanoglu P. An enhanced genetic algorithm for path planning of autonomous UAV in target coverage problems[J]. Applied Soft Computing, 2021, 112: 107796.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx