《算法导论》第 33 章 - 计算几何学
大家好!今天我们来深入讲解《算法导论》第 33 章 ——计算几何学。计算几何学是计算机科学的重要分支,核心是用算法解决几何问题,广泛应用于图形学、机器人导航、GIS(地理信息系统)、自动驾驶等领域。本章将从基础的线段性质入手,逐步讲解线段相交检测、凸包寻找、最近点对查找等经典问题,每个知识点都配套完整可编译的 C++ 代码、清晰的流程图和类图,方便大家动手实践。
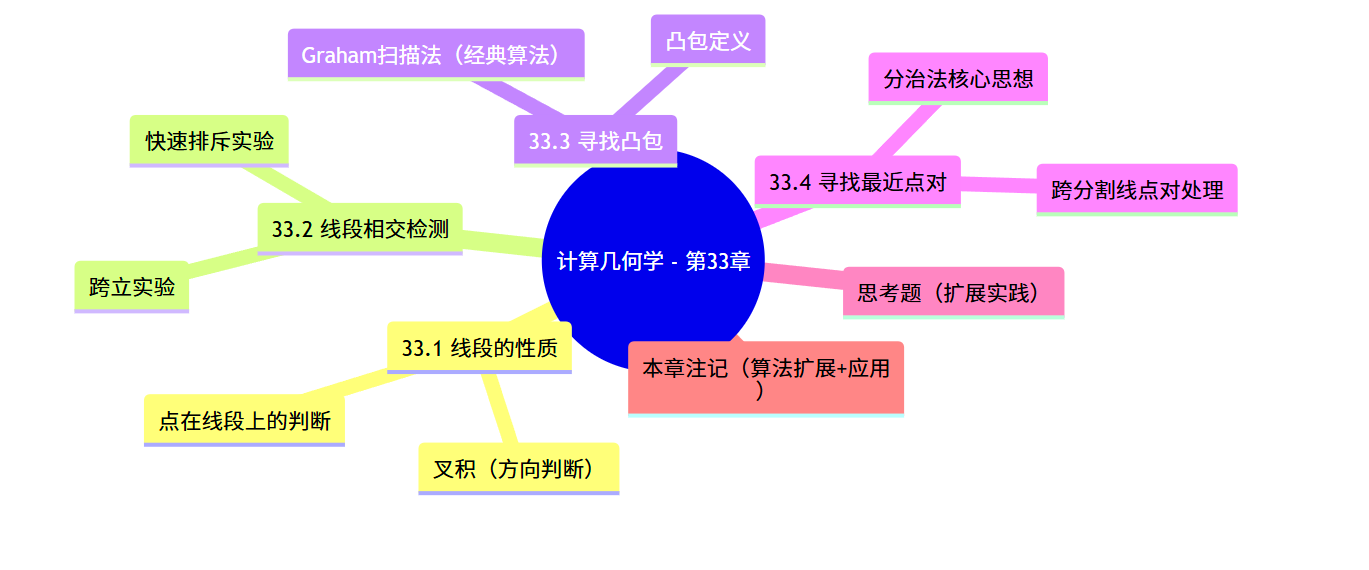
本章内容思维导图
33.1 线段的性质
线段是计算几何学的基础元素,本节重点讲解叉积(判断向量方向)和点在线段上的判断两个核心问题。
1.1 核心概念
(1)叉积:向量方向的 “指南针”
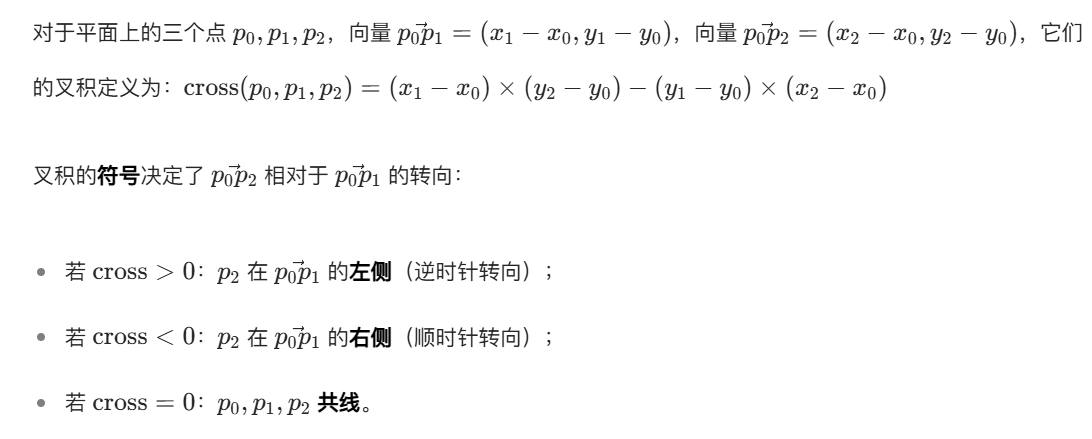
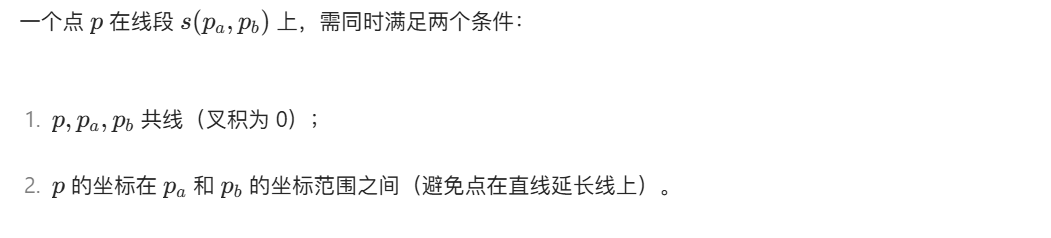
(2)点在线段上的判断
1.2 关键函数实现
首先定义全局精度常量(处理浮点数误差),再实现叉积和点在线段判断函数:
#include <iostream>
#include <vector>
#include <algorithm>
#include <cmath>
#include <stack>
#include <utility>
using namespace std;// 浮点数精度控制(避免直接比较 == 导致的误差)
const double EPS = 1e-8;// 点类:存储x、y坐标,提供基础操作
class Point {
private:double x, y;
public:// 构造函数Point() : x(0.0), y(0.0) {}Point(double x_, double y_) : x(x_), y(y_) {}// 访问器double getX() const { return x; }double getY() const { return y; }// 修改器void setX(double x_) { x = x_; }void setY(double y_) { y = y_; }// 重载 < 运算符(用于按x排序,x相同按y排序)bool operator<(const Point& p) const {if (fabs(x - p.x) > EPS) {return x < p.x;} else {return y < p.y;}}
};// 1. 计算叉积 cross(p0p1, p0p2)
double cross(const Point& p0, const Point& p1, const Point& p2) {return (p1.getX() - p0.getX()) * (p2.getY() - p0.getY()) - (p1.getY() - p0.getY()) * (p2.getX() - p0.getX());
}// 2. 判断点p是否在线段s上(s由a和b组成)
bool onSegment(const Point& p, const Point& a, const Point& b) {// 条件1:p、a、b共线(叉积接近0)if (fabs(cross(a, b, p)) > EPS) {return false;}// 条件2:p的x和y在a、b的范围内(取min和max避免线段方向影响)bool xInRange = (p.getX() >= min(a.getX(), b.getX()) - EPS) && (p.getX() <= max(a.getX(), b.getX()) + EPS);bool yInRange = (p.getY() >= min(a.getY(), b.getY()) - EPS) && (p.getY() <= max(a.getY(), b.getY()) + EPS);return xInRange && yInRange;
}
1.3 综合案例:点在线段判断
需求:输入一个线段(两个端点)和一个点,判断该点是否在线段上。
// 测试点在线段上的功能
void testOnSegment() {cout << "=== 测试点在线段判断 ===" << endl;double x1, y1, x2, y2, px, py;cout << "请输入线段的两个端点(x1 y1 x2 y2):";cin >> x1 >> y1 >> x2 >> y2;cout << "请输入待判断的点(x y):";cin >> px >> py;Point a(x1, y1), b(x2, y2), p(px, py);if (onSegment(p, a, b)) {cout << "点(" << px << "," << py << ")在线段上!" << endl;} else {cout << "点(" << px << "," << py << ")不在线段上!" << endl;}
}
33.2 确定任意一对线段是否相交
判断两条线段是否相交是碰撞检测、图形裁剪的核心问题,需通过快速排斥实验和跨立实验两步验证。
2.1 核心原理
(1)快速排斥实验(初步筛选)
两条线段 (s1(p1,p2)) 和 (s2(p3,p4)) 的包围盒(轴对齐的最小矩形)若不重叠,则线段一定不相交。 包围盒重叠的条件:
- s1 的 x 范围与 s2 的 x 范围重叠;
- s1 的 y 范围与 s2 的 y 范围重叠。
(2)跨立实验(精确判断)
若两条线段相交,则每条线段的两个端点必须 “跨立” 在另一条线段的两侧(或共线且在线段上)。 用叉积判断跨立:
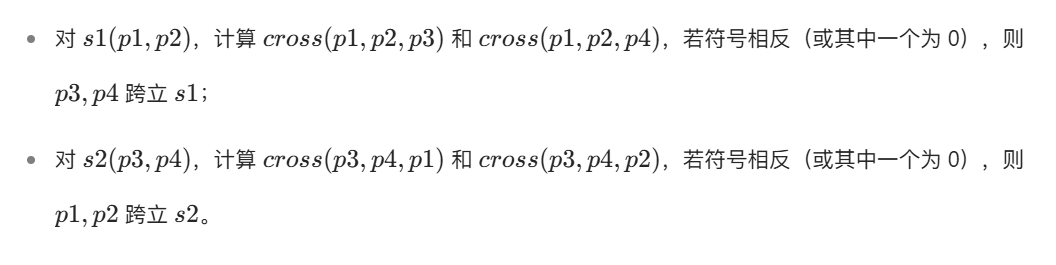
只有快速排斥实验通过 + 跨立实验通过,两条线段才相交。
2.2 数据结构:线段类
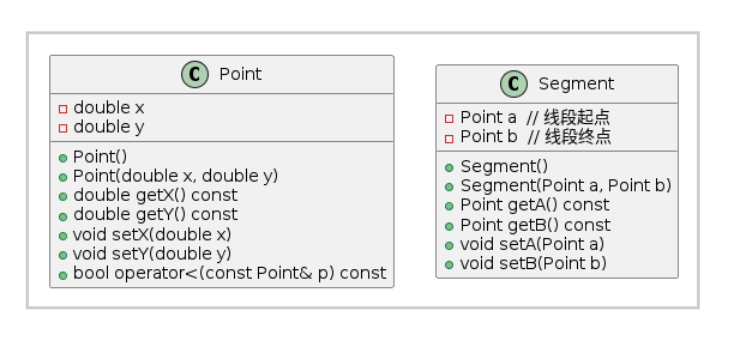
首先定义线段类(依赖 Point 类),并用 PlantUML 展示类结构:
@startuml
class Point {- double x- double y+ Point()+ Point(double x, double y)+ double getX() const+ double getY() const+ void setX(double x)+ void setY(double y)+ bool operator<(const Point& p) const
}class Segment {- Point a // 线段起点- Point b // 线段终点+ Segment()+ Segment(Point a, Point b)+ Point getA() const+ Point getB() const+ void setA(Point a)+ void setB(Point b)
}@enduml
线段类的 C++ 实现:
// 线段类:由两个点组成
class Segment {
private:Point a, b;
public:// 构造函数Segment() : a(Point()), b(Point()) {}Segment(const Point& a_, const Point& b_) : a(a_), b(b_) {}// 访问器Point getA() const { return a; }Point getB() const { return b; }// 修改器void setA(const Point& a_) { a = a_; }void setB(const Point& b_) { b = b_; }
};
2.3 关键函数实现:线段相交判断
// 判断两条线段s1和s2是否相交
bool segIntersect(const Segment& s1, const Segment& s2) {Point p1 = s1.getA(), p2 = s1.getB();Point p3 = s2.getA(), p4 = s2.getB();// 步骤1:快速排斥实验double x1_min = min(p1.getX(), p2.getX()), x1_max = max(p1.getX(), p2.getX());double x2_min = min(p3.getX(), p4.getX()), x2_max = max(p3.getX(), p4.getX());double y1_min = min(p1.getY(), p2.getY()), y1_max = max(p1.getY(), p2.getY());double y2_min = min(p3.getY(), p4.getY()), y2_max = max(p3.getY(), p4.getY());// 若包围盒不重叠,直接返回falseif (x1_max < x2_min - EPS || x2_max < x1_min - EPS ||y1_max < y2_min - EPS || y2_max < y1_min - EPS) {return false;}// 步骤2:跨立实验double c1 = cross(p1, p2, p3); // p3相对于s1的转向double c2 = cross(p1, p2, p4); // p4相对于s1的转向double c3 = cross(p3, p4, p1); // p1相对于s2的转向double c4 = cross(p3, p4, p2); // p2相对于s2的转向// 情况1:严格跨立(叉积符号相反)if ((c1 * c2 < -EPS) && (c3 * c4 < -EPS)) {return true;}// 情况2:其中一个点在线段上(共线且在范围内)if (fabs(c1) < EPS && onSegment(p3, p1, p2)) return true;if (fabs(c2) < EPS && onSegment(p4, p1, p2)) return true;if (fabs(c3) < EPS && onSegment(p1, p3, p4)) return true;if (fabs(c4) < EPS && onSegment(p2, p3, p4)) return true;// 其他情况:不相交return false;
}
2.4 综合案例:多线段相交检测
需求:输入多条线段,判断每一对线段是否相交,并输出结果。
// 测试多线段相交检测
void testSegIntersect() {cout << "=== 测试多线段相交检测 ===" << endl;int n;cout << "请输入线段的数量:";cin >> n;vector<Segment> segments(n);// 输入每条线段的两个端点for (int i = 0; i < n; i++) {double x1, y1, x2, y2;cout << "请输入第" << i+1 << "条线段的端点(x1 y1 x2 y2):";cin >> x1 >> y1 >> x2 >> y2;segments[i] = Segment(Point(x1, y1), Point(x2, y2));}// 检查所有线段对(i < j,避免重复)cout << "\n相交的线段对:" << endl;bool hasIntersect = false;for (int i = 0; i < n; i++) {for (int j = i+1; j < n; j++) {if (segIntersect(segments[i], segments[j])) {cout << "第" << i+1 << "条线段与第" << j+1 << "条线段相交" << endl;hasIntersect = true;}}}if (!hasIntersect) {cout << "没有相交的线段对" << endl;}
}
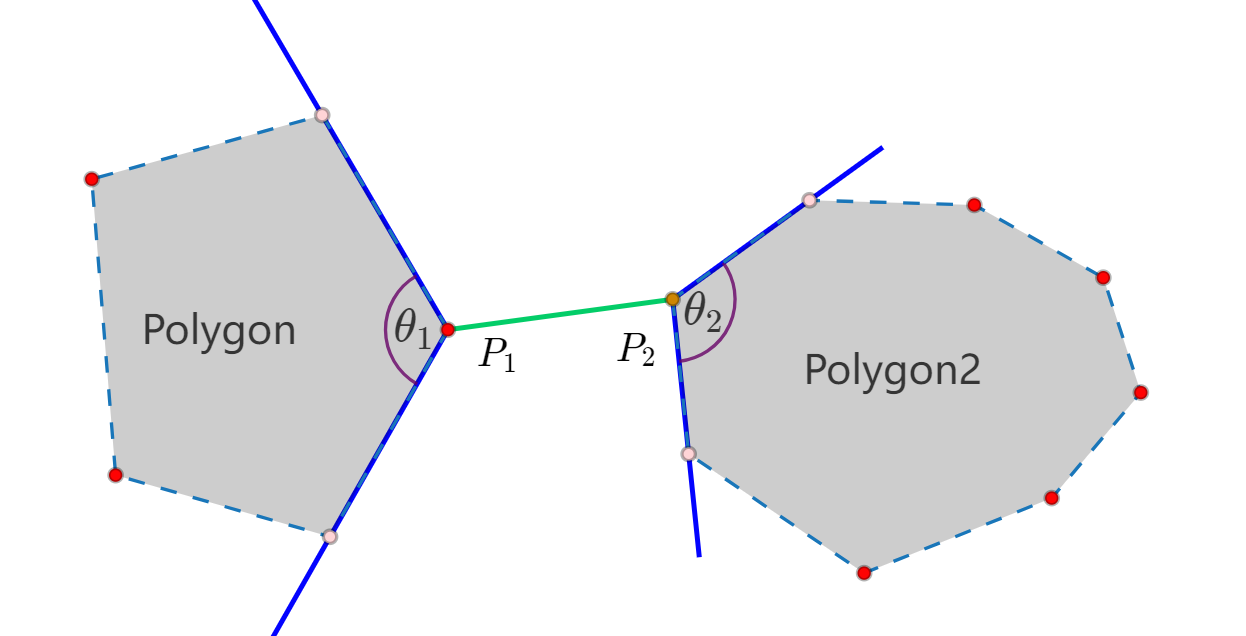
33.3 寻找凸包
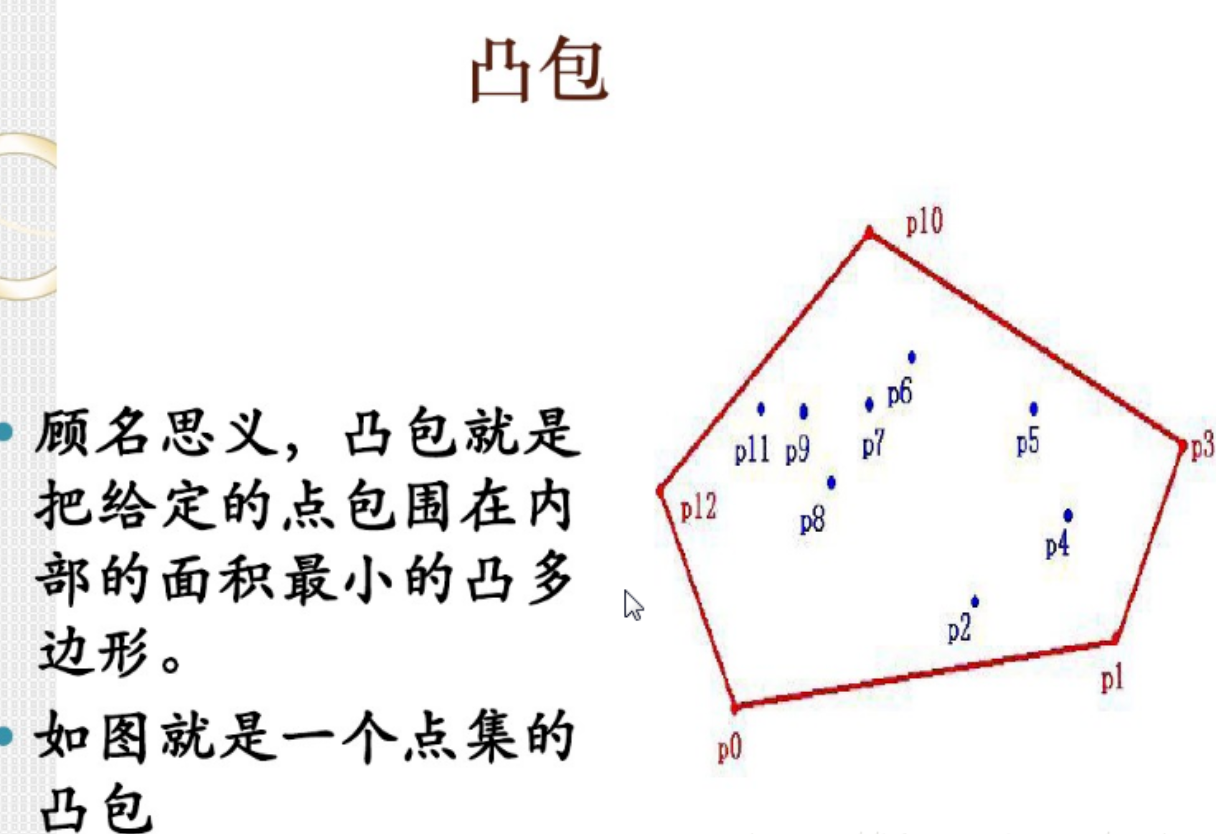
凸包是点集的 “最小凸多边形外壳”,包含点集中所有点,且多边形内任意两点的连线都在多边形内。本节讲解经典的Graham 扫描法。
3.1 核心概念
- 凸包顶点:凸包多边形的顶点(点集中 “最外围” 的点);
- 极角:以某个基准点(如 y 最小的点)为原点,点与原点连线与 x 轴正方向的夹角(用于排序点)。
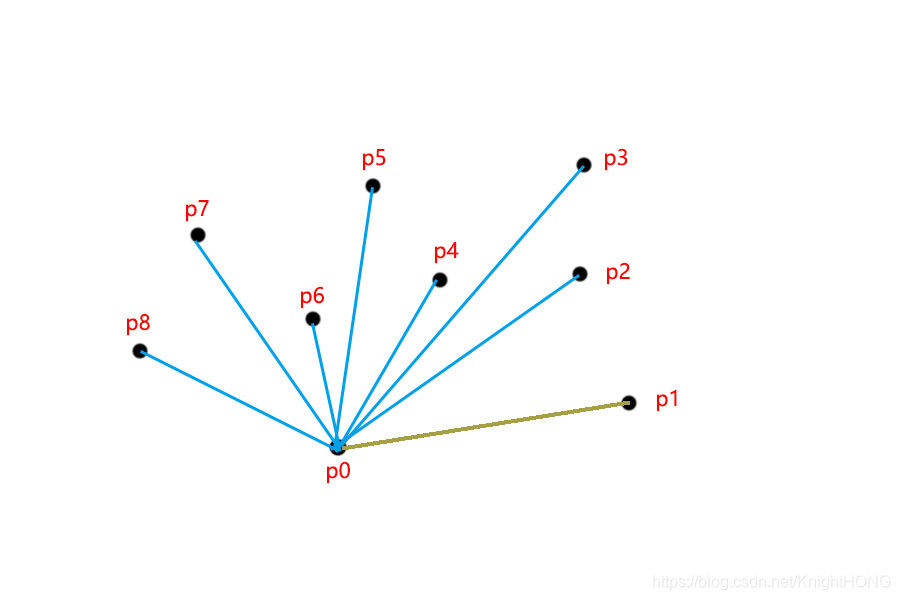
3.2 Graham 扫描法步骤
Graham 扫描法通过 “排序 + 栈维护” 寻找凸包,步骤如下:
- 找基准点:选择 y 坐标最小的点 (p_0)(y 相同选 x 最小的),确保它是凸包的一个顶点;
- 按极角排序:将其他点按与 (p_0) 的极角从小到大排序(极角相同则按距离 (p_0) 由近到远排序);
- 栈维护凸包:
- 初始化栈,压入 (p_0, p_1, p_2);
- 遍历剩余点 (p_i),每次判断栈顶两个点与 (p_i) 的转向:
- 若为非左转(叉积 ≤ 0),弹出栈顶点(该点不在凸包上);
- 若为左转,将 (p_i) 压入栈;
- 栈结果:最终栈中的点即为凸包顶点(按逆时针顺序排列)。
3.3 关键函数实现:Graham 扫描法
// 计算两点间的距离(平方,避免开方开销,比较时可用)
double distSq(const Point& a, const Point& b) {double dx = a.getX() - b.getX();double dy = a.getY() - b.getY();return dx*dx + dy*dy;
}// 计算两点间的实际距离
double dist(const Point& a, const Point& b) {return sqrt(distSq(a, b));
}// 极角排序的比较函数(以p0为基准)
bool comparePolar(const Point& p0, const Point& p1, const Point& p2) {double c = cross(p0, p1, p2);if (fabs(c) > EPS) {return c > 0; // 左转:p1在p2前面(极角小)} else {// 共线:距离p0近的在前面(避免冗余点)return distSq(p0, p1) < distSq(p0, p2);}
}// Graham扫描法寻找凸包,返回凸包顶点(逆时针顺序)
vector<Point> grahamScan(vector<Point> points) {int n = points.size();if (n <= 1) return points; // 点数≤1,凸包就是自身// 步骤1:找基准点p0(y最小,y相同x最小)int minIdx = 0;for (int i = 1; i < n; i++) {if (points[i].getY() < points[minIdx].getY() - EPS ||(fabs(points[i].getY() - points[minIdx].getY()) < EPS && points[i].getX() < points[minIdx].getX() - EPS)) {minIdx = i;}}swap(points[0], points[minIdx]); // p0移到第一个位置Point p0 = points[0];// 步骤2:按极角排序(排除p0)sort(points.begin() + 1, points.end(), [&](const Point& p1, const Point& p2) {return comparePolar(p0, p1, p2);});// 步骤3:栈维护凸包stack<Point> st;st.push(points[0]);st.push(points[1]);for (int i = 2; i < n; i++) {// 弹出非左转的点(栈至少有2个点才判断)while (st.size() >= 2) {Point pTop1 = st.top(); st.pop();Point pTop2 = st.top();// 计算pTop2 -> pTop1 -> points[i]的转向if (cross(pTop2, pTop1, points[i]) <= EPS) {// 非左转,pTop1不在凸包上,继续弹出continue;} else {// 左转,将pTop1放回栈,退出循环st.push(pTop1);break;}}st.push(points[i]);}// 步骤4:将栈转为向量(凸包顶点)vector<Point> convexHull;while (!st.empty()) {convexHull.push_back(st.top());st.pop();}// 栈是逆序的,反转后得到逆时针顺序reverse(convexHull.begin(), convexHull.end());return convexHull;
}
3.4 综合案例:生成点集的凸包
需求:输入一组点,输出凸包的顶点(按逆时针顺序)和凸包的周长。
// 计算凸包的周长
double convexHullPerimeter(const vector<Point>& convexHull) {int m = convexHull.size();if (m <= 1) return 0.0;double perimeter = 0.0;for (int i = 0; i < m; i++) {int j = (i + 1) % m; // 最后一个点连回第一个点perimeter += dist(convexHull[i], convexHull[j]);}return perimeter;
}// 测试Graham扫描法寻找凸包
void testGrahamScan() {cout << "=== 测试Graham扫描法寻找凸包 ===" << endl;int n;cout << "请输入点的数量:";cin >> n;vector<Point> points(n);// 输入每个点的坐标for (int i = 0; i < n; i++) {double x, y;cout << "请输入第" << i+1 << "个点的坐标(x y):";cin >> x >> y;points[i] = Point(x, y);}// 计算凸包vector<Point> convexHull = grahamScan(points);int m = convexHull.size();// 输出结果cout << "\n凸包顶点(逆时针顺序):" << endl;for (int i = 0; i < m; i++) {cout << "(" << convexHull[i].getX() << "," << convexHull[i].getY() << ") ";}cout << "\n凸包周长:" << convexHullPerimeter(convexHull) << endl;
}
33.4 寻找最近点对
最近点对问题是:在平面点集中找到距离最小的一对点。本节用分治法解决,时间复杂度为 (O(n \log n))。
4.1 分治法核心思想
分治法的核心是 “分而治之”,将问题拆分为子问题,解决子问题后合并结果:
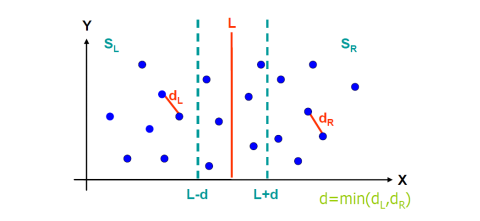
- 分割:将点集按 x 坐标排序后,分成左半部分 L 和右半部分 R(各含 (n/2) 个点);
- 求解子问题:递归寻找 L 的最近点对(距离 d1)和 R 的最近点对(距离 d2),取 (d = min(d1, d2));
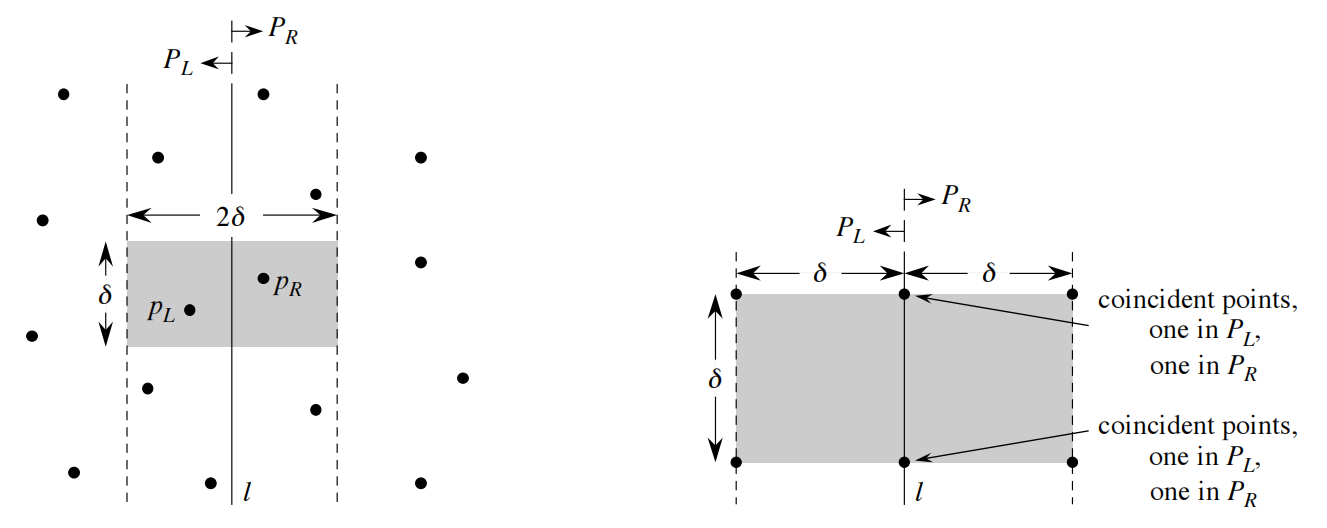
- 合并:处理跨分割线的点对(即一个点在 L、一个点在 R):
- 收集距离分割线(L 的最右点 x 坐标)≤ d 的点,组成集合 S;
- 将 S 按 y 坐标排序,对每个点 p,只需与后面6 个点比较(数学证明:(d×2d) 的矩形内最多有 6 个距离≥d 的点);
- 找到 S 中的最小距离 d3,最终最近距离为 (min(d, d3))。
4.2 关键函数实现:分治法寻找最近点对
// 暴力法寻找最近点对(用于n ≤ 3的情况)
pair<Point, Point> bruteForce(const vector<Point>& points) {int n = points.size();pair<Point, Point> closestPair = {points[0], points[1]};double minDist = distSq(points[0], points[1]);// 遍历所有点对for (int i = 0; i < n; i++) {for (int j = i+1; j < n; j++) {double dSq = distSq(points[i], points[j]);if (dSq < minDist - EPS) {minDist = dSq;closestPair = {points[i], points[j]};}}}return closestPair;
}// 处理跨分割线的点集strip,寻找距离小于d的最近点对
pair<Point, Point> findClosestInStrip(vector<Point>& strip, double d) {int m = strip.size();pair<Point, Point> closestPair = {strip[0], strip[1]};double minDist = distSq(strip[0], strip[1]);// 按y坐标排序stripsort(strip.begin(), strip.end(), [](const Point& a, const Point& b) {if (fabs(a.getY() - b.getY()) > EPS) {return a.getY() < b.getY();} else {return a.getX() < b.getX();}});// 每个点只需与后面6个点比较for (int i = 0; i < m; i++) {for (int j = i+1; j < m && (strip[j].getY() - strip[i].getY()) < d + EPS; j++) {double dSq = distSq(strip[i], strip[j]);if (dSq < minDist - EPS) {minDist = dSq;closestPair = {strip[i], strip[j]};}}}return closestPair;
}// 分治法寻找最近点对(递归函数,输入按x排序的点集)
pair<Point, Point> closestPairRecursive(vector<Point>& pointsX) {int n = pointsX.size();// base case:n ≤ 3,暴力求解if (n <= 3) {return bruteForce(pointsX);}// 步骤1:分割点集为左半L和右半Rint mid = n / 2;Point midPoint = pointsX[mid];vector<Point> Lx(pointsX.begin(), pointsX.begin() + mid);vector<Point> Rx(pointsX.begin() + mid, pointsX.end());// 步骤2:递归求解子问题pair<Point, Point> leftPair = closestPairRecursive(Lx);pair<Point, Point> rightPair = closestPairRecursive(Rx);// 步骤3:计算子问题的最小距离ddouble d1 = distSq(leftPair.first, leftPair.second);double d2 = distSq(rightPair.first, rightPair.second);double d = min(d1, d2);pair<Point, Point> closest = (d1 < d2) ? leftPair : rightPair;// 步骤4:收集跨分割线的点集strip(距离midPoint.x ≤ d)vector<Point> strip;for (const Point& p : pointsX) {if (fabs(p.getX() - midPoint.getX()) < d + EPS) {strip.push_back(p);}}// 步骤5:处理strip中的点对,更新最近点对if (strip.size() >= 2) {pair<Point, Point> stripPair = findClosestInStrip(strip, sqrt(d));double d3 = distSq(stripPair.first, stripPair.second);if (d3 < d - EPS) {closest = stripPair;}}return closest;
}// 寻找最近点对的入口函数(先按x排序点集)
pair<Point, Point> findClosestPair(vector<Point> points) {int n = points.size();if (n < 2) {throw invalid_argument("点集数量必须≥2!");}// 按x坐标排序(分治法的前提)sort(points.begin(), points.end());return closestPairRecursive(points);
}
4.3 综合案例:寻找点集中的最近点对
需求:输入一组点,输出最近点对的坐标和它们的距离。
// 测试寻找最近点对
void testClosestPair() {cout << "=== 测试寻找最近点对 ===" << endl;int n;cout << "请输入点的数量(≥2):";cin >> n;vector<Point> points(n);// 输入每个点的坐标for (int i = 0; i < n; i++) {double x, y;cout << "请输入第" << i+1 << "个点的坐标(x y):";cin >> x >> y;points[i] = Point(x, y);}// 寻找最近点对try {pair<Point, Point> closest = findClosestPair(points);Point p1 = closest.first;Point p2 = closest.second;double minDist = dist(p1, p2);// 输出结果cout << "\n最近点对:" << endl;cout << "点1:(" << p1.getX() << "," << p1.getY() << ")" << endl;cout << "点2:(" << p2.getX() << "," << p2.getY() << ")" << endl;cout << "最小距离:" << minDist << endl;} catch (const invalid_argument& e) {cout << "错误:" << e.what() << endl;}
}
思考题
本节提供 2 道扩展思考题,帮助大家深化对本章算法的理解:
思考题 1:处理凸包中的共线点
问题:Graham 扫描法默认保留共线的点,如何修改算法,使凸包只保留共线线段的端点(去除中间冗余点)?
思路:在极角排序时,对共线点只保留距离基准点 p0 最远的点(近点会被远点 “覆盖”,不在凸包上)。
代码片段(修改极角排序比较函数):
bool comparePolarOptimized(const Point& p0, const Point& p1, const Point& p2) {double c = cross(p0, p1, p2);if (fabs(c) > EPS) {return c > 0; // 左转优先} else {// 共线:距离远的在后面(排序后保留最后一个,即最远点)return distSq(p0, p1) > distSq(p0, p2);}
}// 排序后去重共线点
vector<Point> optimizeCollinearPoints(const vector<Point>& sortedPoints, const Point& p0) {vector<Point> optimized;optimized.push_back(p0);for (int i = 1; i < sortedPoints.size(); i++) {// 若当前点与前一个点不共线,加入优化后的集合if (fabs(cross(p0, optimized.back(), sortedPoints[i])) > EPS) {optimized.push_back(sortedPoints[i]);}}return optimized;
}
思考题 2:优化最近点对的排序开销
问题:分治法中每次递归都对 strip 集按 y 排序,如何优化以减少排序开销?
思路:提前对整个点集按 y 排序,递归时将 y 排序的子集传递给子问题,合并时直接从 y 排序集中筛选 strip 点(无需重新排序)。
代码片段(优化后的递归函数):
pair<Point, Point> closestPairOptimized(vector<Point> pointsX, vector<Point> pointsY) {int n = pointsX.size();if (n <= 3) return bruteForce(pointsX);// 分割int mid = n / 2;Point midPoint = pointsX[mid];vector<Point> Lx(pointsX.begin(), pointsX.begin() + mid);vector<Point> Rx(pointsX.begin() + mid, pointsX.end());// 分割pointsY为Ly和Ry(按midPoint的x)vector<Point> Ly, Ry;for (const Point& p : pointsY) {if (p.getX() < midPoint.getX() + EPS) {Ly.push_back(p);} else {Ry.push_back(p);}}// 递归auto leftPair = closestPairOptimized(Lx, Ly);auto rightPair = closestPairOptimized(Rx, Ry);double d1 = distSq(leftPair.first, leftPair.second);double d2 = distSq(rightPair.first, rightPair.second);double d = min(d1, d2);auto closest = (d1 < d2) ? leftPair : rightPair;// 筛选strip集(从pointsY中直接取,已按y排序)vector<Point> strip;for (const Point& p : pointsY) {if (fabs(p.getX() - midPoint.getX()) < d + EPS) {strip.push_back(p);}}// 后续逻辑不变...return closest;
}
本章注记
1. 算法扩展
- 凸包算法:除了 Graham 扫描法,还有 Jarvis 步进法(礼物包装法,适合凸包顶点少的场景)、QuickHull 算法(平均效率高,类似快速排序);
- 最近点对算法:随机化算法(通过随机打乱点集降低最坏情况概率)、线性时间算法(在特定条件下,如点集按 x/y 排序)。
2. 精度注意事项
计算几何学大量使用浮点数,必须注意精度误差:
- 避免直接用
==比较浮点数,改用fabs(a - b) < EPS判断 “近似相等”; - EPS 的取值需根据场景调整(如毫米级精度用 1e-3,微米级用 1e-6)。
3. 实际应用场景
- 图形学:碰撞检测(线段相交)、纹理映射(凸包简化模型);
- 机器人导航:路径规划(凸包简化障碍物)、避障(最近点对判断距离);
- GIS:区域最小包围矩形(基于凸包)、地图匹配(最近点对);
- 自动驾驶:激光雷达点云处理(凸包提取障碍物轮廓)。
完整代码入口
将所有功能整合到主函数,通过菜单选择测试:
int main() {int choice;do {cout << "\n===== 《算法导论》第33章-计算几何学 =====" << endl;cout << "1. 测试点在线段判断" << endl;cout << "2. 测试多线段相交检测" << endl;cout << "3. 测试Graham扫描法寻找凸包" << endl;cout << "4. 测试寻找最近点对" << endl;cout << "0. 退出" << endl;cout << "请选择功能(0-4):";cin >> choice;switch (choice) {case 1: testOnSegment(); break;case 2: testSegIntersect(); break;case 3: testGrahamScan(); break;case 4: testClosestPair(); break;case 0: cout << "退出程序!" << endl; break;default: cout << "无效选择,请重新输入!" << endl;}} while (choice != 0);return 0;
}
总结
本章讲解了计算几何学的 4 个核心问题,从基础的线段性质到复杂的分治法应用,每个知识点都配套了可直接编译运行的代码。关键在于理解叉积(方向判断)和分治法(问题拆解)这两个核心工具,它们是解决更复杂几何问题的基础。
建议大家动手编译运行代码,修改参数测试不同场景(如共线点、密集点集),并尝试完成思考题的扩展。如果有问题或优化建议,欢迎在评论区交流!区交流!