【MAR】OSCNet+学习笔记
1.基础知识理论
(1)CT成像系统
CT(计算机断层扫描)机器扫描得到的最初数据是投影数据(Projection Data)(也叫 弦图 / sinogram,其实就是X射线从不同角度穿过病人后测到的衰减值集合)。
1)投影数据产生过程
- X射线发射:CT扫描过程中,X射线管发射一束X射线,这束X射线穿过人体的特定部位。
- X射线衰减:当X射线穿过人体时,会与人体组织相互作用,导致X射线强度的衰减。不同密度和成分的组织(如骨骼、肌肉、脂肪等)对X射线的衰减程度不同。
- 探测器测量:穿过人体后的X射线被探测器接收,探测器测量到的是X射线的强度。这个强度反映了X射线在穿过人体过程中的衰减情况。
2)投影数据的形式
- 投影数据:探测器测量到的X射线强度数据被称为投影数据。这些数据是沿着X射线束的方向记录的,反映了X射线在穿过人体时的衰减情况。
- 投影角度:CT扫描过程中,X射线管和探测器会围绕人体旋转,通常旋转360度。在每个旋转角度上,探测器都会记录一组投影数据。这些投影数据从不同角度描述了人体内部结构的X射线衰减情况。
3)投影数据的数学表示
数学公式:

其中:
是在角度 θ 和位置 t 处的投影数据。
是人体内部组织的线性衰减系数,表示X射线在位置 (x,y) 处的衰减程度。
是狄拉克δ函数,用于表示X射线在特定路径上的衰减积分。
4)投影数据的处理
- 图像重建:投影数据是CT图像重建的原始数据。通过复杂的数学算法(如滤波反投影法、迭代重建法等),这些投影数据被转换成人体内部的二维或三维图像。
- 校正和预处理:在图像重建之前,投影数据通常需要进行一系列的校正和预处理操作,如暗场校正、增益校正、散射校正等,以提高图像质量和减少伪影。
(2)FBP(Filtered Back-Projection,滤波反投影法)
FBP算法主要分为两个步骤:滤波和反投影。
1)滤波(Filtering)
①目的:滤波的目的是补偿投影数据中的低频成分,增强高频成分,以减少图像中的模糊和伪影。
②过程:
- 傅里叶变换:将每个投影数据(sinogram的每一行)从空间域转换到频域。
- 应用滤波器:在频域中应用一个高通滤波器。常用的滤波器包括拉普拉斯滤波器、汉宁窗滤波器、汉明窗滤波器等。这些滤波器的作用是增强高频成分,减少低频成分。
- 逆傅里叶变换:将滤波后的频域数据逆变换回空间域,得到滤波后的投影数据。
③公式
对于每个投影角度,投影数据
经过滤波后的数据
可以表示为:
![]()
其中:
表示傅里叶变换。
表示逆傅里叶变换。
是滤波器函数,通常是一个高通滤波器。
2)反投影(Back-Projection)
①目的:反投影的目的是将滤波后的投影数据投影回图像平面,重建出断层图像。
②过程:
- 逐像素累加:对于图像平面上的每个像素,根据每个投影方向上的滤波后投影数据,将相应的投影值累加到该像素上。具体来说,对于每个投影角度 θ 和每个探测器通道 t,将滤波后的投影值 P(θ,t) 投影到图像平面上,累加到对应的像素位置。
- 重建图像:通过上述累加过程,最终得到的图像就是重建后的断层图像。
③公式
重建后的图像可以表示为:
![]()
其中:
是滤波后的投影数据。
是投影数据在图像平面上的坐标。
(3)MAR传统方法
如果有金属,X射线几乎被完全吸收,导致对应位置的 投影数据缺失或失真。当这些不完整的投影数据被“反投影”成图像时,就会产生伪影。所以,传统方法的核心思路是:
👉 在图像重建之前,先把弦图中受金属影响的区域 修复 或 替代。
① 线性插值(LI)
在投影域(sinogram)把金属对应的被污染 / 缺失的投影段“挖掉”,用邻近未被污染的数据做线性插值(沿探测器通道方向),然后用插值后的 sinogram 做常规重建(如 FBP)。
具体步骤
初步重建(可选):对原始 sinogram 做一次快速重建(FBP),目的是得到一个能区分金属与软组织的图像(尽管伪影很多,但金属亮斑通常能被检测到)。
金属分割(图像域):对重建图像做阈值分割得到金属二值掩码(例如 HU > 某个阈值)。常见阈值范围:2000–3000HU(与扫描器、重建窗口有关,需调参)。
前投影(forward project):把图像域的金属掩码投影到投影域,得到 sinogram_mask(θ,s)(True/1 表示该 (角度θ, 探测器通道 s) 被金属影响)。可对掩码做膨胀(dilation)若干像素以覆盖金属边缘及周围散射效应。
按角度做插值:对每个投影角 θ,找到被 mask 覆盖的连续段,在探测器维度上用前后可用点做线性插值(也可以尝试二次 / 三次插值或样条)。
重建:用插值后的 sinogram 做 FBP(或其它反投影)得到最终图像。
为什么会有问题(LI 的缺陷)
插值值只从邻近通道借信息,不遵守 CT 的几何一致性(角度之间、不同探测器之间的全局关系),因此反投影后往往产生 二次伪影(新的条纹/模糊)。
对大尺寸金属或金属密集区域,周围未被污染的“可靠”数据太少,插值不稳定。
实现要点 / 调参建议
掩码膨胀:通常膨胀 2–10 像素(取决于 detector sampling)可减少边界效应。
端点处理:若掩码靠近探测器边缘,可能缺少两端端点,选择“最近值扩展”(nearest)或用外推。
插值方法:线性足够快;若 mask 小块且数据平滑可尝试 cubic/spline,但风险是过拟合振铃。
插值后平滑:对插值区做小尺度低通(gaussian)平滑,避免突然的投影不连续。
②归一化金属伪影还原(NMAR)
先构造一个**“先验”**(没有金属或金属被替换的参考图像),由此得到 先验的 sinogram,用先验对原始投影做归一化(把金属影响“标准化”成更易插值的形式),在归一化空间做插值,再把结果“去归一化”回真实投影域,从而减少插值带来的结构偏差。
为什么有用(直观)
直接在原始被污染投影上插值会被金属周围的高对比度“带偏”。用先验 sinogram 去除(或弱化)这种影响后,插值结果更“中性”、更接近真实组织投影,去归一化后更符合几何一致性。
详细流程
①初始 LI 修复
目的:通过快速插值方法对原始sinogram进行初步修复,得到一个初步的图像 。
步骤:
- 线性插值(LI):在原始sinogram中,找到被金属污染或缺失的投影段,用邻近未被污染的数据进行线性插值。这种方法简单快速,但可能无法完全消除金属伪影。
- 重建初步图像:用插值后的sinogram进行常规重建(如FBP),得到初步图像
.
②生成先验图像
目的:生成一个无金属或“金属被替换”的先验图像 。
步骤:
- 组织分割:对初步图像
- 金属区域替换:在初步图像中找到金属区域,并用周围软组织或骨组织的平均值替换金属区域。这样得到的图像
就是一个无金属或“金属被替换”的先验图像。
③前投影先验
目的:将先验图像 前投影,得到先验投影数据
或
。
步骤:
- 前投影:使用与CT扫描相同的几何参数,将先验图像
或
。前投影过程是重建过程的逆过程,它将图像数据转换为投影数据。
④ 归一化
目的:对原始投影数据进行归一化处理,以减少金属伪影的影响。
步骤:
选择归一化方法:根据数据类型,选择合适的归一化方法。常见的归一化方法包括除法归一化和减法归一化。
先验与归一化的两种数学形式取决于你的 sinogram 存储的是哪种量:
- 情形 A:sinogram 存的是探测器原始强度/透射计数
(常见于原始数据),归一化使用除法
- 情形 B:sinogram 存的line integrals
(即通常的 sinogram),归一化使用减法(因为 line integrals 可视为对数域.
务必确认你的 sinogram 是原始强度还是已经做了 -ln 变换(很多公开数据集直接提供的是 line integral)
- 除法归一化:将原始投影数据
除以先验投影数据
![]()
减法归一化:将原始投影数据
![]()
⑤插值修复归一化后的投影
目的:对归一化后的投影数据进行插值修复,以进一步减少金属伪影的影响。
步骤:
- 插值方法:在归一化后的投影数据
中,找到被金属污染或缺失的投影段,用邻近未被污染的数据进行插值。常用的插值方法包括线性插值、样条插值等。
- 稳定性:在归一化域中进行插值通常比在原始域中进行插值更稳定,因为归一化后的数据更容易处理。
⑥ 去归一化
目的:将插值修复后的归一化投影数据恢复到原始数据的量纲。
步骤:
选择去归一化方法:根据归一化方法,选择相应的去归一化方法。
- 除法归一化的去归一化:将插值修复后的归一化投影数据
![]()
- 减法归一化的去归一化:将插值修复后的归一化投影数据

⑦重建
目的:用修复后的投影数据 进行图像重建,得到最终的断层图像。
步骤:选择重建算法:可以选择常规的FBP算法或迭代重建算法。
- FBP重建:使用FBP算法对修复后的投影数据
进行重建,得到最终的断层图像。
- 迭代重建:使用迭代重建算法对修复后的投影数据
总结
NMAR算法通过以下步骤减少CT图像中的金属伪影:
①初始LI修复:用线性插值对原始sinogram进行初步修复,得到初步图像
②生成先验图像:对进行组织分割,替换金属区域,得到先验图像
。
③前投影先验:将 前投影,得到先验投影数据
。
④归一化:对原始投影数据进行归一化处理。
⑤插值修复归一化后的投影:在归一化域中对投影数据进行插值修复。
⑥去归一化:将修复后的归一化投影数据恢复到原始数据的量纲。
⑦重建:用修复后的投影数据进行图像重建,得到最终的断层图像。
NMAR 的优点与局限
优点:比 LI 更能保留结构一致性,降低二次伪影。
局限:非常依赖 先验图像的质量(分割/金属替换不准确会把错误固定进去)。对于大面积数据丢失或金属数量很多的情况仍然不足。
实战细节与调参
先验图像生成:用 LI 重建后进行分割(阈值或基于形态学的连通性),再把金属像素替换为局部邻域(或整幅图)软组织/骨值的中值/均值。替换后可做小范围高斯平滑以避免锐边。
避免除零/低值:做除法时对
(如 1e−61e-61e−6 或更大,取决单位)。
重复迭代:可以把 NMAR 做一次后再重复一次(用新重建生成更好先验)通常会进一步改善。
插值方法 & 平滑:同 LI。插值后做片段边界平滑,避免突然不连续。
评价:用 RMSE/SSIM 与 ground-truth(若有)比较;还要人工查看金属边缘处是否出现“假组织”边界。
2.摘要
问题背景:
- CT(X光断层扫描)在临床上很常用。
- 但如果病人身体里有金属(比如牙科填充物、假体、钢钉等),就会在CT图像上出现伪影 —— 一些不真实的条纹或阴影,会干扰医生诊断。
现有方法的局限:
- 现在很多人用深度学习来去伪影,但这些方法通常只学到了“图像差异”,并没有充分利用伪影的物理特征。
他们的创新:
- 发现伪影的特点:金属伪影往往呈现出旋转对称的条纹(streaking patterns)。
- 设计了一个叫 OSCNet 的网络:
利用“方向共享卷积 (orientation-shared convolution)”来适应这些旋转对称的模式。
用傅里叶级数展开来建模伪影,帮助把伪影和真实组织分离。
采用“深度展开 (deep unfolding)”的思想:把一个优化算法(proximal gradient)转换成网络结构。
为了适应不同大小、不同类型金属造成的不同伪影,他们又在 OSCNet 里加了一个动态卷积子网络,形成 OSCNet+,提升了泛化能力。
结果:
- 他们在合成数据和临床数据上做了大量实验,证明 OSCNet/OSCNet+ 的效果优于现有方法。
3.用于编码金属伪影的方向共享卷积模型
(1)分解模型定义:
![]()
:在非金属区域要恢复的“干净”CT 图像
:在非金属区域的伪影
- 用逐点乘 ⊙ 和金属掩膜 I(I(i,j)=0 表示金属像素,=1 表示非金属像素)
只在非金属区域做恢复,金属区域本身不重建。
(2)先验观察:旋转对称条状(RSS, rotationally symmetrical streaking)
作者指出,金属伪影 A 在不同旋转角度上都呈现相似的条状结构。
⇒ 如果能用“同一组局部条状模式,在不同方向上旋转”来刻画 A,就能
- 显式地嵌入物理先验
- 显著减少可学习参数量(一组滤波器即可覆盖所有角度)
所以,提出用一组旋转共享的卷积滤波器来表示伪影 A,模型如下:
![]()
:离散旋转角度的数量,
- 每个方向上有 K 个“原子”/滤波器;。
:把同一个基础滤波器在角度
上旋转之后的核(编码“条纹形态”);
:特征图,表示伪影在空间中的位置和强度。
解释
- 每个角度
来表示伪影的局部模式。
- 所有角度共享同一组“母滤波器”
,通过旋转矩阵
生成不同角度的滤波器。
- 这种设计显著减少了需要学习的参数量,从 L×K 减少到 K。
这就显式地把“不同方向共享同一套模式”写进了模型:同一组基础滤波器在各个角度复用,只是位置系数不同。与普通“每个核只用于一个方向”的做法相比,它更贴合旋转对称条纹先验,且需要学习的核更少(参数更省、泛化更好)。
传统方法 = 每个方向学一套核;
OSCNet = 学一套基础核,通过旋转生成各方向的核,再配合不同的系数图表示伪影。
(3)傅里叶级数参数化——离散卷积核如何“可旋转”?
离散卷积核直接旋转会产生锯齿/走样。作者为此不直接学核的每个像素,而是先定义一个连续滤波器函数 ,用二维傅里叶级数基去表示,再通过坐标旋转来“旋转滤波器”。具体地,每个旋转后的核元素由

与
:带径向窗
的余弦/正弦基,作者把常规基频做了折返索引
的修正,缓解旋转时的走样;
旋转
- 可学习参数只有系数
,
:傅里叶系数,与角度无关,是全局可学习参数。并且在所有方向上共享(这就把“旋转对称”固化为“参数共享”)。训练时网络学的是这些系数;在任意角度
与其“先学一堆离散核,再想办法旋转它们”,不如“先学一个可被旋转的连续滤波器(用傅里叶系数描述),需要哪个角度就把坐标旋转过去再采样”。这样旋转是“天然”的,同一套系数就能生成任意角度的核。
解释
- 通过傅里叶级数参数化,每个滤波器
- 旋转操作通过旋转矩阵
(4)张量化紧凑表示
为了进一步简化模型,作者将上述模型写成张量形式:
![]()
:用傅里叶基
和参数
描述一个“连续可旋转的基础滤波器”;
:对这个基础滤波器做旋转(可生成不同角度的版本);
与
卷积:把旋转后的核“铺在”图像不同位置上(系数图决定在哪里、强度多少)。
一个基础核(由 W 控制形状),旋转到不同角度后,再结合位置系数 M,就能生成整个伪影层 A。
4.OSCNet
(1)核心目标
基于方向共享卷积模型,构建一个优化启发式的深度网络(OSCNet),用于 CT 图像的金属伪影去除。这个网络不仅显式地嵌入了金属伪影的旋转对称条状先验,还通过优化算法展开成网络结构,具有很强的可解释性和泛化能力。
(2)优化算法
在这一部分,作者首先提出了一个带正则化的优化问题,用于估计伪影层 A、特征图 M 和干净图像 X。优化问题如下:

:Frobenius 范数,用于衡量重建误差。
和
:正则化项,分别对特征图 M 和干净图像 X 施加先验约束。
- α 和 β:平衡参数,用于调整正则化项的权重。
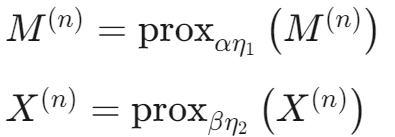
为了求解这个优化问题,作者采用近端梯度算法,交替更新 M 和 X:

和
:步长参数。
和
:近端算子,用于实现正则化项的约束。
和
:梯度计算。
(3)网络设计
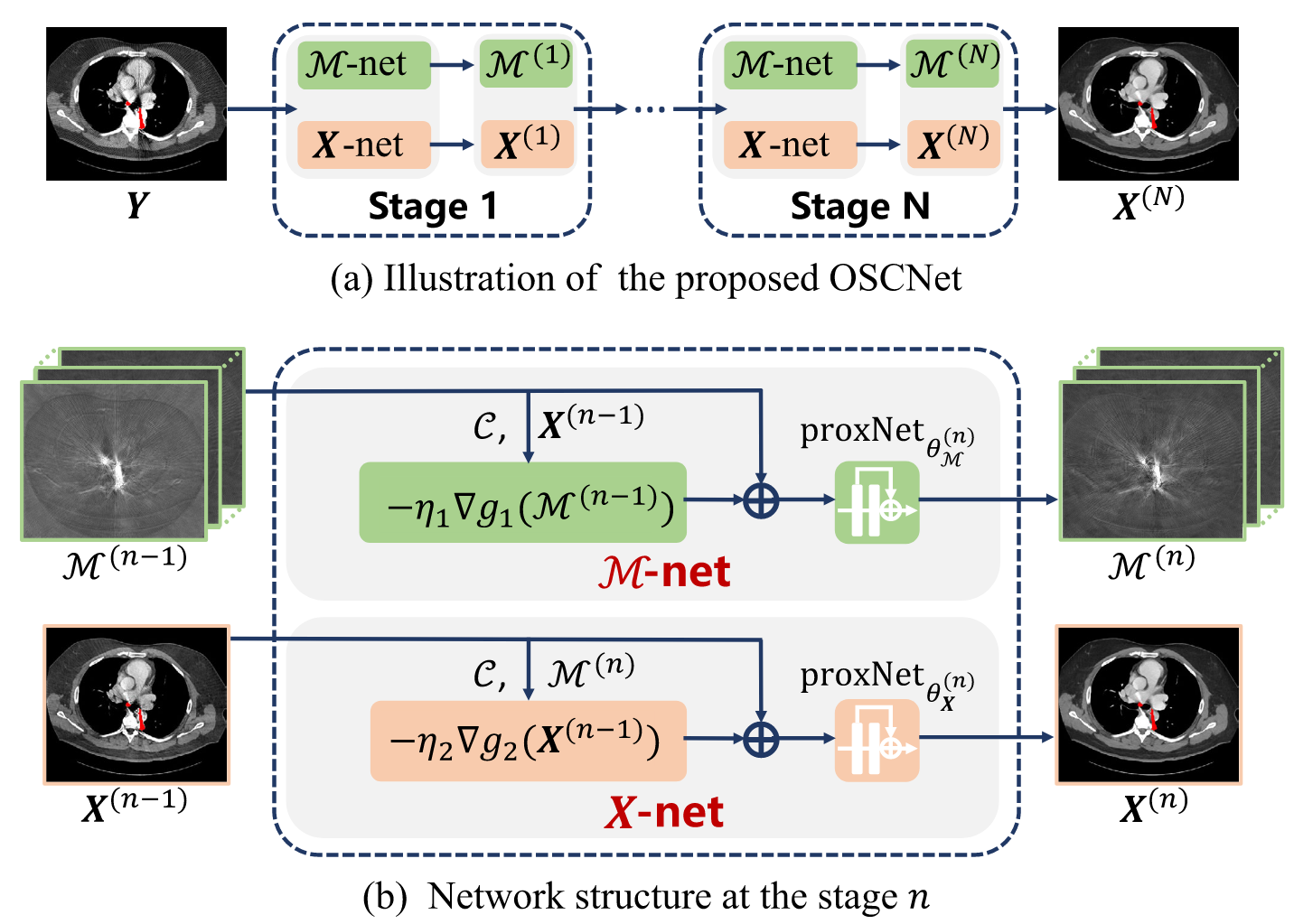
基于上述优化算法,作者将每个迭代步骤展开成网络模块,构建了 OSCNet。具体网络结构如下:
①网络结构
- M-net:用于更新特征图 M。
- X-net:用于更新干净图像 X。
- W-net:用于更新全局傅里叶系数 W(这部分在后续的 OSCNet+ 中进一步扩展)。
②网络模块
M-net 和 X-net:基于 ResNet 构建,每个模块包含多个残差块(ResBlock),每个残差块包含:
- 两个卷积层(Conv+BN+ReLU)。
- 一个跳跃连接(Skip Connection)。
W-net:用于动态更新傅里叶系数 W,包含多个卷积层、全局平均池化层、线性层和 ReLU 层。
③迭代过程
每个迭代阶段 n 包含 M-net 和 X-net 的更新。具体步骤如下:
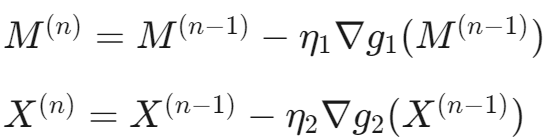
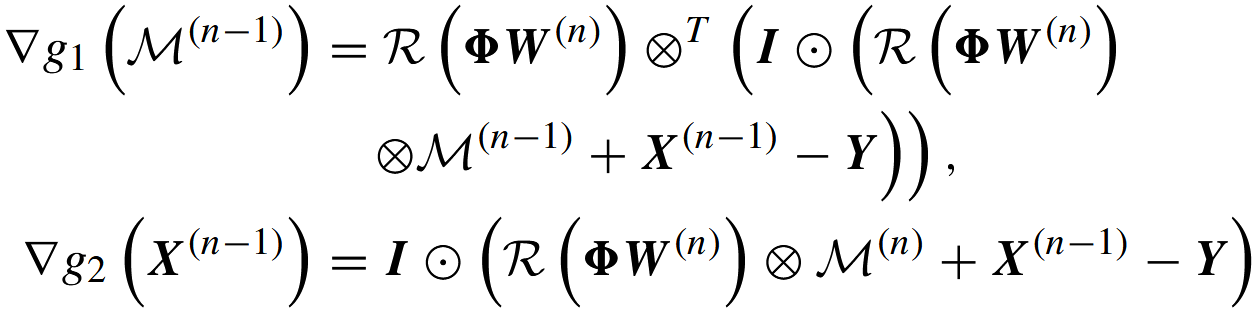
1)计算梯度

![]()
![]()
2)梯度下降
3)近端操作
4)网络输出
经过 N 个迭代阶段后,网络输出最终的干净图像 X (N)。
5.动态 OSCNet
核心目标:提高 OSCNet 在处理不同大小和类型的金属伪影时的灵活性和泛化能力。通过动态调整卷积表示,使网络能够自适应地学习不同输入图像的伪影特征。
(1)优化算法
Dynamic OSCNet 的优化算法基于对原始优化问题的扩展,引入了动态调整的傅里叶系数矩阵 W。优化问题如下:
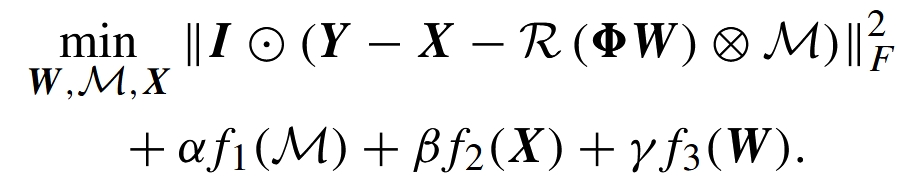
要点:与 OSCNet(W为全数据共享的可训练参数)不同,这里把 W 作为样本/阶段依赖的变量来处理 —— 于是需要一种方式在推理时根据输入动态生成 W。
用近端梯度思想对上个公式做迭代更新,作者推导得到在第 n 个阶段(迭代)下的更新式(核心三步):
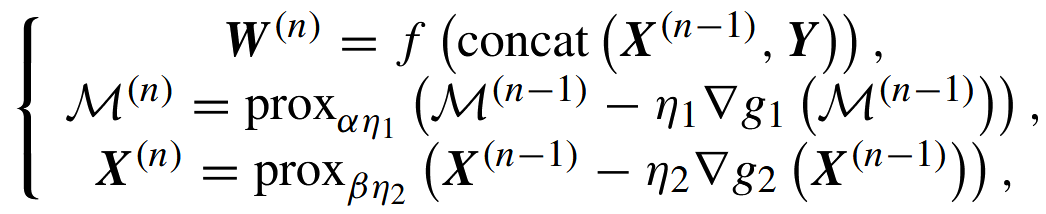
其中:
解释:
第一步
:不再直接用梯度求解 W,而是用一个小的映射网络 f(后文叫做 W-net 或 WNet)把上一阶段重建
和原始 Y 拼接作为输入,直接预测本阶段的 Fourier-扩展系数矩阵
。这样 W 成为样本/阶段依赖的(动态)参数。
第二、三步:对
与 X做带近端项的梯度更新(proximal gradient),prox 操作通过网络模块实现(后文称 proxNet),以增加表达能力并引入非线性/先验。
直接把 W 交给一个小网络来输出,能把复杂的非线性依赖(伪影受金属大小、位置、组织差异影响)建模进去;而 M与 X 的更新仍保留“可解释”的优化式形式(proximal),便于将物理先验和网络表示结合。
(2)网络设计
作者把上面的迭代规则直接映射为可训练的网络模块(端到端学习所有参数):在迭代阶段n, OSCNet+包括以下计算步骤:

W-net(即映射 ):
作者用 GAP + 全局信息 是关键:伪影“强弱”通常是全图级别(比如金属大则伪影强),全局统计信息能帮助 WNet 估计滤波器系数的能量分布;同时用少量卷积层保持轻量不会显著增加计算负担。WNet 实质上是个小巧的条件自适应生成器(类似 hyper-network)。
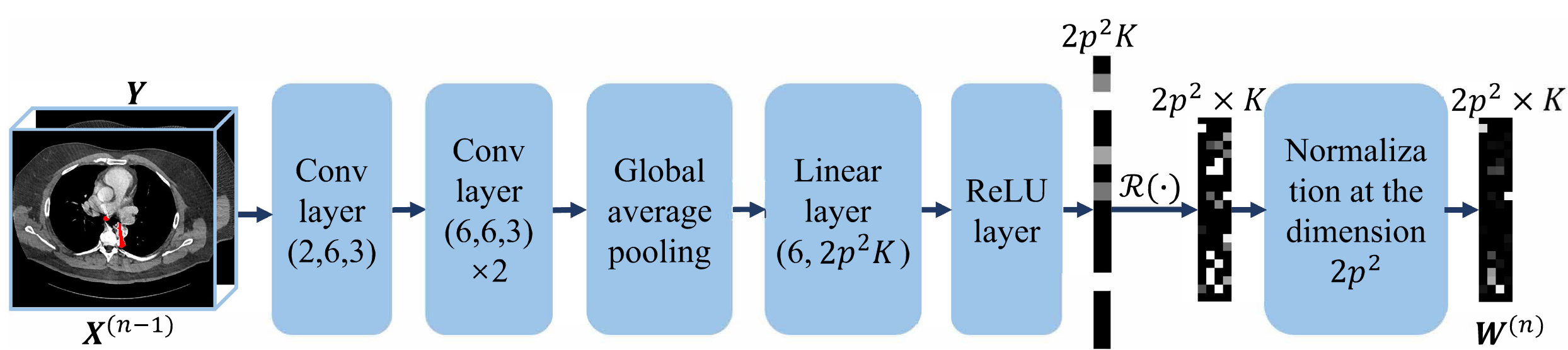
结构(论文/代码说明):三层卷积用于提取局部特征 → 全局平均池化(GAP)获得全局强度信息 → ReLU(强制非负)→ reshape(把得到的向量映射为 Fourier-系数矩阵的形状)→ 归一化步骤(控制傅里叶展开系数能量,避免“放大”滤波器能量干扰提取)。
功能:把拼接的
映射为这一阶段的展开系数
M-net 与 X-net(proxNet):
prox 操作由小的 ResNet 实现(每阶段不同参数):每个 ResNet 由 T个残差块组成;每个残差块为
[Conv → BN → ReLU → Conv → BN + skip]。这两个 proxNet 分别实现 p
和
,即学习型近端算子,负责把梯度步后的中间量投影/细化为更合理的
与
。在最末阶段作者还额外加了一个 ResNet 做最终细化。
R(ΦW) 的实现:
W 是傅里叶级数的展开系数,通过
得到空域滤波器(这一步是 OSC 的滤波器参数化细节——把 Fourier-系数映射回 p×p 空域卷积核)。作者使用这一参数化使滤波器易于旋转并共享方向先验(方向共享机制在 III 节有详细推导)。
训练目标(分阶段 supervision):
作者对每个阶段的输出
采用逐阶段损失,整体 loss 的一个常见写法(论文给出)是 L2 + L1 混合、并对不同阶段加权:
所有网络参数(WNet 权重、各阶段 proxNet 的权值、步长参数
、以及可能的正则参数)都是端到端训练的。
