NVIDIA Isaac Sim
NVIDIA Isaac Sim 是一款基于 NVIDIA Omniverse 平台构建的机器人仿真与 AI 训练平台,专为开发自主机器人系统设计。它通过高精度物理引擎、传感器模拟、合成数据生成和 AI 集成能力,为机器人开发者提供了从设计到部署的全流程支持。

核心架构与技术基础
-
底层平台:NVIDIA Omniverse
Isaac Sim 依托 Omniverse 的 OpenUSD(通用场景描述) 架构,支持多工具协作和实时 3D 渲染。这意味着开发者可无缝导入 CAD 模型、工业设计工具(如 SolidWorks)的场景,并与其他 Omniverse 应用(如 Machinima、Create)协同工作。例如,宝马已利用此特性构建数字孪生工厂,实现生产线的虚拟调试。 -
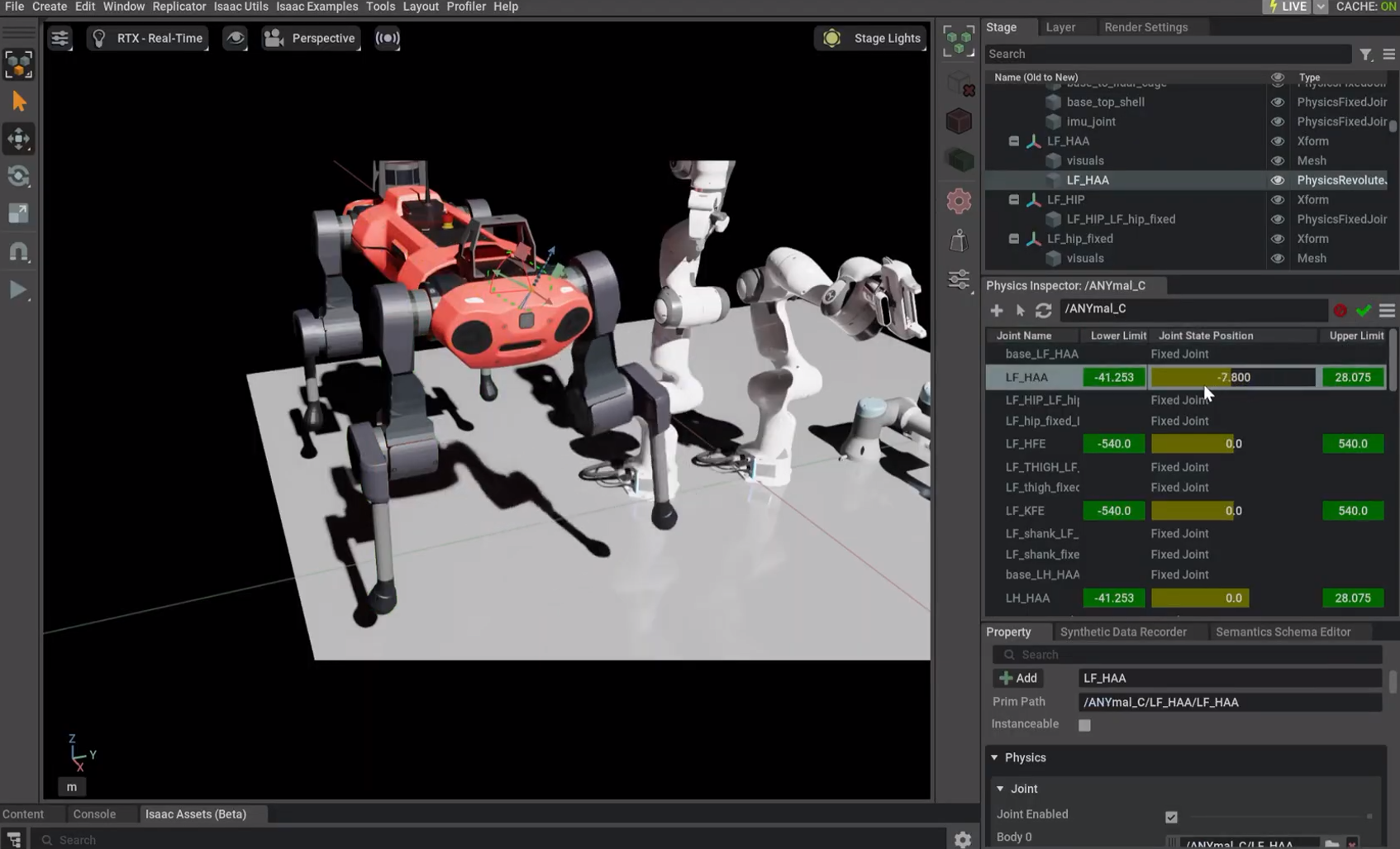
物理引擎:NVIDIA PhysX
深度集成 PhysX 5.4,支持刚体/软体动力学、关节摩擦建模(与 Hexagon Robotics、maxon 合作开发)及多机器人碰撞检测。例如,人形机器人在仿真中的关节驱动行为可通过制造商数据表精确建模,缩小仿真与现实的差距。 -
AI 加速与传感器模拟
- AI 训练框架:内置 Isaac Lab(取代原 Isaac Gym),支持强化学习(RL)和模仿学习,可利用多 GPU 并行训练策略。例如,傅利叶智能的 GR-2 人形机器人通过 Isaac Lab 训练站立/行走策略,部署至 Jetson AGX Orin 边缘设备。
- 传感器仿真:支持激光雷达、摄像头(含深度图噪声模型)、IMU 等多模态传感器,输出数据可直接用于训练计算机视觉模型。例如,合成的立体摄像头噪声模式与真实传感器高度相似,提升模型泛化能力。
一、核心功能:构建高保真机器人数字孪生
1. 物理引擎与场景建模
Isaac Sim 集成 NVIDIA PhysX 5.4 物理引擎,支持刚体、软体、流体等复杂物理交互模拟。例如,在工业机械臂仿真中,可精确模拟关节摩擦、物体碰撞反弹等力学行为,甚至支持柔性材料(如布料、线缆)的动态响应。通过 OpenUSD(通用场景描述)格式,开发者可无缝导入 CAD 模型或第三方工具(如 Blender)创建的场景,实现从设计到仿真的无缝衔接。
2. 多模态传感器模拟
平台支持摄像头、LiDAR、雷达、IMU 等传感器的高保真模拟。例如,RTX LiDAR 模拟可生成带有噪声和环境反射特性的点云数据,其精度与真实传感器误差小于 2%。传感器校准工具支持镜头畸变模型(如鱼眼、径向畸变)的参数化配置,确保仿真数据与真实硬件的一致性。
3. AI 与机器学习集成
- 模型训练与推理:直接集成 PyTorch、TensorRT 等框架,支持端到端训练。例如,通过 Isaac Sim 生成的合成数据可训练 YOLOv5 目标检测模型,实现物体识别准确率超过 95%。
- 强化学习(RL)支持:内置 Isaac Gym 框架,可并行运行数千个仿真环境,加速机器人策略训练。例如,在仓储物流场景中,机器人通过 RL 学习避障策略,训练效率比传统方法提升 10 倍。
4. 合成数据生成(SDG)
借助 Omniverse Replicator 工具,Isaac Sim 可自动化生成带有精确标注的合成数据集。例如,通过领域随机化技术,可随机调整光照、材质、物体位置等参数,生成数百万张包含边界框、语义分割和深度信息的图像。Trimble 公司利用此功能生成 KITTI 格式数据集,训练自主机器人在复杂室内环境中的导航模型,数据生成成本降低 70%。
5. ROS 生态兼容性
支持 ROS 1/2 协议,通过专用桥接器实现仿真与真实机器人软件栈的无缝对接。例如,在 ROS 2 Humble 环境中,可直接订阅 Isaac Sim 发布的摄像头和 IMU 数据,验证 SLAM 算法的实时性。Cogniteam 团队通过此功能在 Isaac Sim 中模拟 10 台协作机器人,验证了多机器人任务分配算法的有效性。
6. 云原生与分布式计算
通过 NVIDIA OSMO 平台,Isaac Sim 可扩展至云端运行大规模仿真。例如,在 AWS EC2 G6e 实例上,可并行运行 10,000 个仿真环境,GPU 利用率达 95%,训练速度提升 2 倍。阿里云 AnalyticDB 方案进一步实现万级并行仿真,任务完成时间缩短 90%。
二、工作流程:从仿真到部署的闭环开发
1. 场景搭建与机器人配置
- 环境建模:使用 USD 格式导入工厂、仓库等场景,或调用预制的 SimReady 资产库(包含 1,000+ 物理精准模型)。例如,在农业机器人仿真中,可快速搭建温室大棚环境,包含作物、障碍物和光照变化模型。
- 机器人配置:通过 URDF/SDF 格式导入机器人模型,配置关节参数(如最大扭矩、摩擦系数)和传感器布局。Hexagon Robotics 协作机器人的仿真案例中,通过 Isaac Sim 精确复现了其执行器动力学特性。
2. 传感器校准与数据采集
- 传感器设置:添加 RTX 摄像头并配置焦距、分辨率,启用 LiDAR 的点云密度和噪声参数。例如,在医疗机器人仿真中,可模拟内窥镜的鱼眼畸变特性,生成符合临床场景的图像数据。
- 合成数据生成:通过领域随机化技术,生成多样化训练数据。例如,在仓储场景中,随机调整货架颜色、货物摆放位置,同时自动标注物体类别和位姿,生成 10 万张带标注的图像。
3. 算法开发与仿真验证
- AI 模型训练:使用 Isaac Lab 框架编写强化学习脚本,在仿真环境中训练机器人策略。例如,物流机器人通过 10 万次仿真迭代,学会在动态障碍物中规划最短路径,成功率从 60% 提升至 92%。
- 软件在环(SIL)测试:将机器人控制软件(如 ROS 节点)接入仿真环境,验证算法在极端场景下的鲁棒性。例如,在自动驾驶仿真中,通过注入传感器故障(如摄像头黑屏),测试紧急制动系统的响应时间。
4. 优化与部署
- 参数调优:通过 Isaac Sim 的性能分析工具(如 Profiler),定位仿真瓶颈。例如,在多机器人协作场景中,优化物理引擎的时间步长和并行计算参数,使帧率从 20 FPS 提升至 60 FPS。
- 硬件部署:将训练好的模型转换为 TensorRT 格式,部署到 Jetson Orin 等边缘设备。例如,医疗机器人的视觉识别模型在 Jetson 上实现实时推理,延迟小于 50ms。
NVIDIA Isaac Sim 通过物理引擎、传感器模拟、合成数据生成和 AI 集成的深度融合,重新定义了机器人开发范式。其核心价值在于:
- 降低试错成本:在虚拟环境中验证算法,避免真实硬件损坏风险;
- 加速 AI 训练:并行仿真与合成数据生成显著缩短模型迭代周期;
- 无缝生态衔接:从 ROS 到 Jetson 的全链路支持,实现从仿真到部署的“最后一公里”打通。
可通过 NVIDIA 开发者官网 获取最新文档与案例,开启自主机器人开发新征程。