【opencv-Python学习笔记(7):图像平滑处理】
目标:
1. 知道图像平滑的作用及应用场景
2. 这点知识也是很简单的
## 为什么需要图像平滑?
像素与周围像素差距很大,显得格格不入,就需要把这些像素点进行校正和剔除,从而让图像好看。
(1)均值滤波
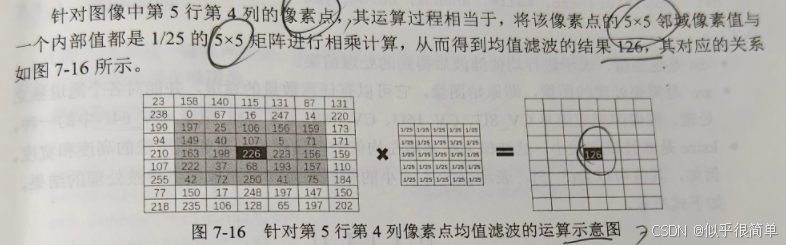
含义:均值滤波是指用当前像素点周围N*M个像素值的均值来替代当像
原理:首先,我们对周围多少个像素取平均值,一般情况下,以当前单个像素为中心,对周围相同的行数和列数进行曲平均值。
计算方式:
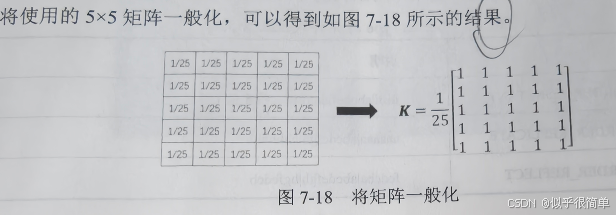
卷积核:
函数:dst = cv2.blur(src, ksize, anchor, borderType)
- dst 是返回值,为进行均值滤波后得到的结果
- src:输入图像(单通道或多通道),图像深度应该为CV_8U、CV_16U、CV_16S、CV_32F、CV_64F等等
- ksize:卷积核大小(如(3,3)、(5,5),需为正奇数)
- anchor:锚点,默认值为(-1,-1),表示当前计算均值的点位于核的中心位置
- borderType:边界填充方式,决定以何种方式处理边界
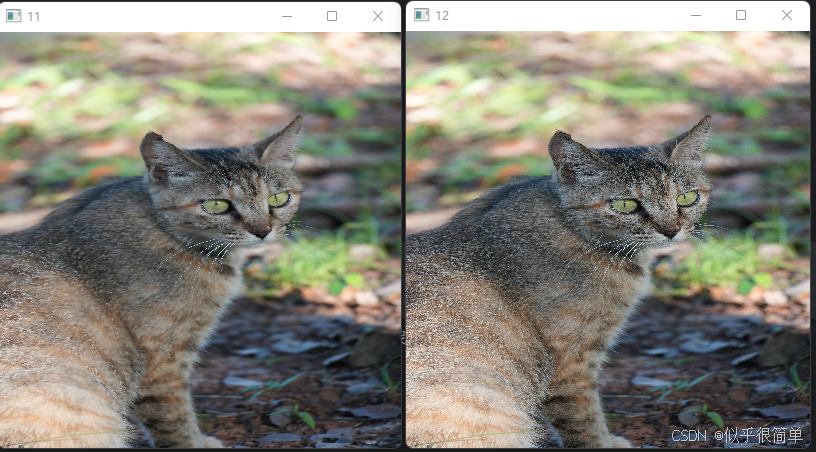
- 实例:
import cv2img1 = cv2.imread("1.JPG") img2 = cv2.blur(img1,(3,3)) cv2.namedWindow("11",cv2.WINDOW_NORMAL) cv2.namedWindow("12",cv2.WINDOW_NORMAL) cv2.imshow("11",img2) cv2.imshow("12",img1) cv2.waitKey() cv2.destroyAllWindows()结果:本次采用卷积核为3,因为图片是相机拍摄,本身就很高清。
(2)盒子滤波
解释:自由选择滤波结果是领域像素值之和的平均值,还是领域像素之和
函数:dst = cv2.boxFilter(src, ddepth, ksize, anchor, normalize, borderType)
参数:
- dst:结果图像
- src:输入图像,具有任意数量的通道数
- ddepth:处理结果图像的图像深度,用-1来表示与输入图像具有相同的图像深度
- anchor:锚点
- normalize:是否是否进行归一化
注意:一般情况下,只需设置src, ddepth, ksize三个参数即可,其他的默认就行
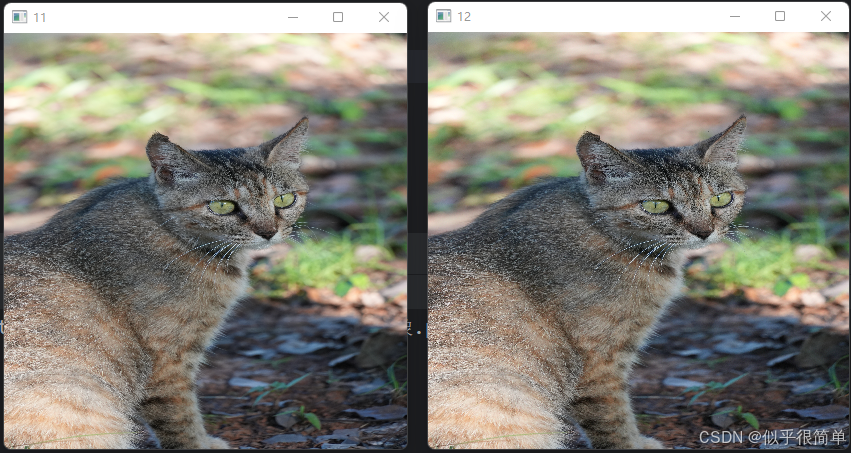
实例:
import cv2img1 = cv2.imread("1.JPG")
img2 = cv2.boxFilter(img1,-1,(3,3))
cv2.namedWindow("11",cv2.WINDOW_NORMAL)
cv2.namedWindow("12",cv2.WINDOW_NORMAL)
cv2.imshow("11",img2)
cv2.imshow("12",img1)
cv2.waitKey()
cv2.destroyAllWindows()结果:
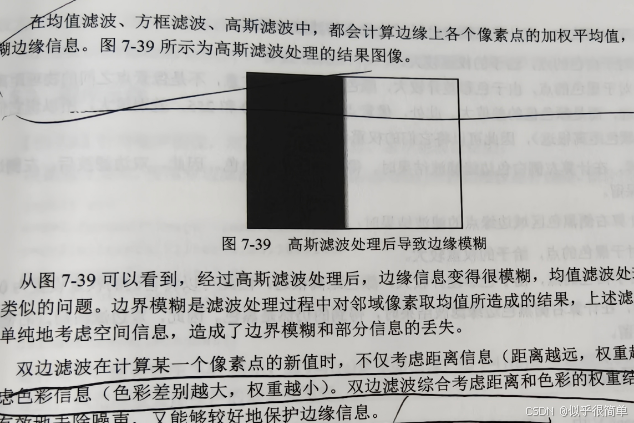
(3)高斯滤波
原理:用高斯函数生成的卷积核进行滤波,权重随距离中心像素的距离增大而减小(符合正态分布),更贴合人眼对 “近邻像素影响更大” 的认知
效果:平滑效果比均值滤波更自然,对高斯噪声的抑制效果更好,边缘模糊程度较轻
函数:dst = cv2.GaussianBlur(src, ksize, sigmaX, sigmaY, borderType)
参数:
- dst:滤波后图像
- src:原始图像
- ksize:滤波核大小,滤波核的值为基数
- sigmaX:水平方向(X轴)标准差,其控制是权重的比例
- sigmaY:是卷积核在垂直方向上(Y轴方向)的标准差。
但是高斯滤波的一般形式:dst = cv2.GaussianBlur(src, ksize, 0,0)
实例:
import cv2img1 = cv2.imread("1.JPG")
img2 = cv2.GaussianBlur(img1,(3,3),0)
cv2.namedWindow("11",cv2.WINDOW_NORMAL)
cv2.namedWindow("12",cv2.WINDOW_NORMAL)
cv2.imshow("11",img2)
cv2.imshow("12",img1)
cv2.waitKey()
cv2.destroyAllWindows()结果:
(4)中值滤波
含义:它是用邻域内所有像素值得中间来替代当前像素点的像素值
函数:dst = cv2.medianBlur(src, ksize)
参数:
- dst:滤波处理后图像
- src:输入图像
- ksize:是滤波核大小,为一个整值,表示核的宽度和高度
实例:
import cv2img1 = cv2.imread("1.JPG")
img2 = cv2.medianBlur(img1,3)
cv2.namedWindow("11",cv2.WINDOW_NORMAL)
cv2.namedWindow("12",cv2.WINDOW_NORMAL)
cv2.imshow("11",img2)
cv2.imshow("12",img1)
cv2.waitKey()
cv2.destroyAllWindows()结果:
(5)双边滤波
解释:双边滤波是综合考虑空间信息和色彩信息的滤波方式,在过程中能有效的保护图像内的边缘信息
函数:dst = cv2.bilateralFilter(src, d, sigmaColor, sigmaSpace, borderType)
参数:
- dst:返回值
- src:原始图像
- d:空间距离参数
- sigmaColor:滤波时选取颜色差值范围,决定哪些像素点可以参与滤波中来
- sigmaSpace:空间距离标准差(越大,影响范围越广)
- borderType:边界样式
实例:
import cv2img1 = cv2.imread("1.JPG")
img2 = cv2.bilateralFilter(img1,25,100,100)
cv2.namedWindow("11",cv2.WINDOW_NORMAL)
cv2.namedWindow("12",cv2.WINDOW_NORMAL)
cv2.imshow("11",img2)
cv2.imshow("12",img1)
cv2.waitKey()
cv2.destroyAllWindows()结果: