基于STM32的电动车智能报警系统设计与实现
一、系统架构设计
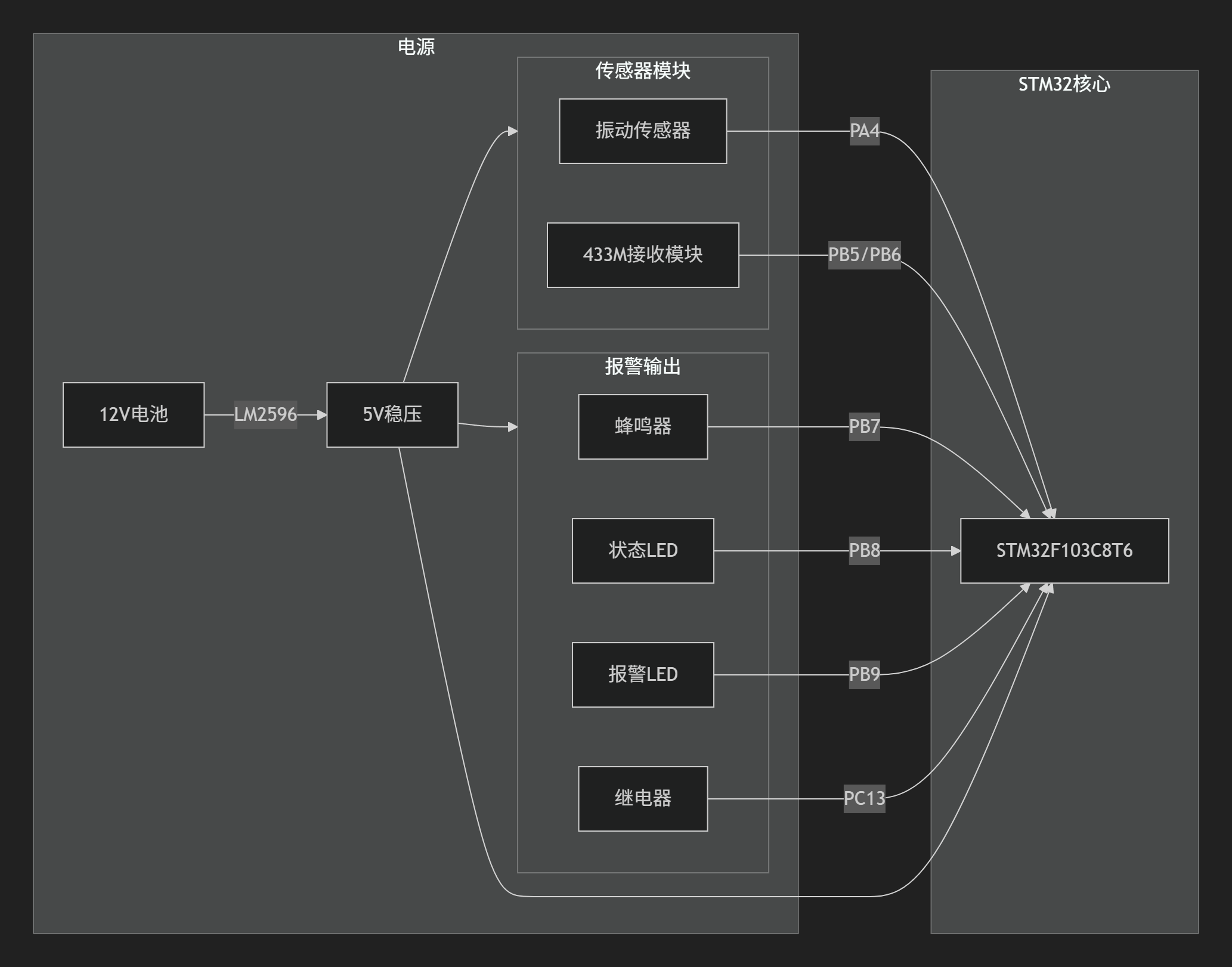
1.1 系统整体架构

1.2 硬件连接图
二、核心模块技术解析
2.1 振动传感器模块
技术参数:
- •
型号:SW-18015P
- •
工作电压:3.3-5V
- •
灵敏度:可调电位器(0-30cm)
- •
输出特性:常开型,振动时导通
电路设计:
// 振动检测电路
void vibration_sensor_init(void) {GPIO_InitTypeDef gpio_init;__HAL_RCC_GPIOA_CLK_ENABLE();gpio_init.Pin = GPIO_PIN_4;gpio_init.Mode = GPIO_MODE_INPUT;gpio_init.Pull = GPIO_PULLUP; // 上拉电阻确保稳定HAL_GPIO_Init(GPIOA, &gpio_init);
}// 高级振动检测算法
uint8_t detect_vibration(void) {static uint32_t last_detect_time = 0;uint32_t current_time = HAL_GetTick();// 防抖检测if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_4) == GPIO_PIN_RESET) {if(current_time - last_detect_time > 50) { // 50ms防抖last_detect_time = current_time;return 1;}}return 0;
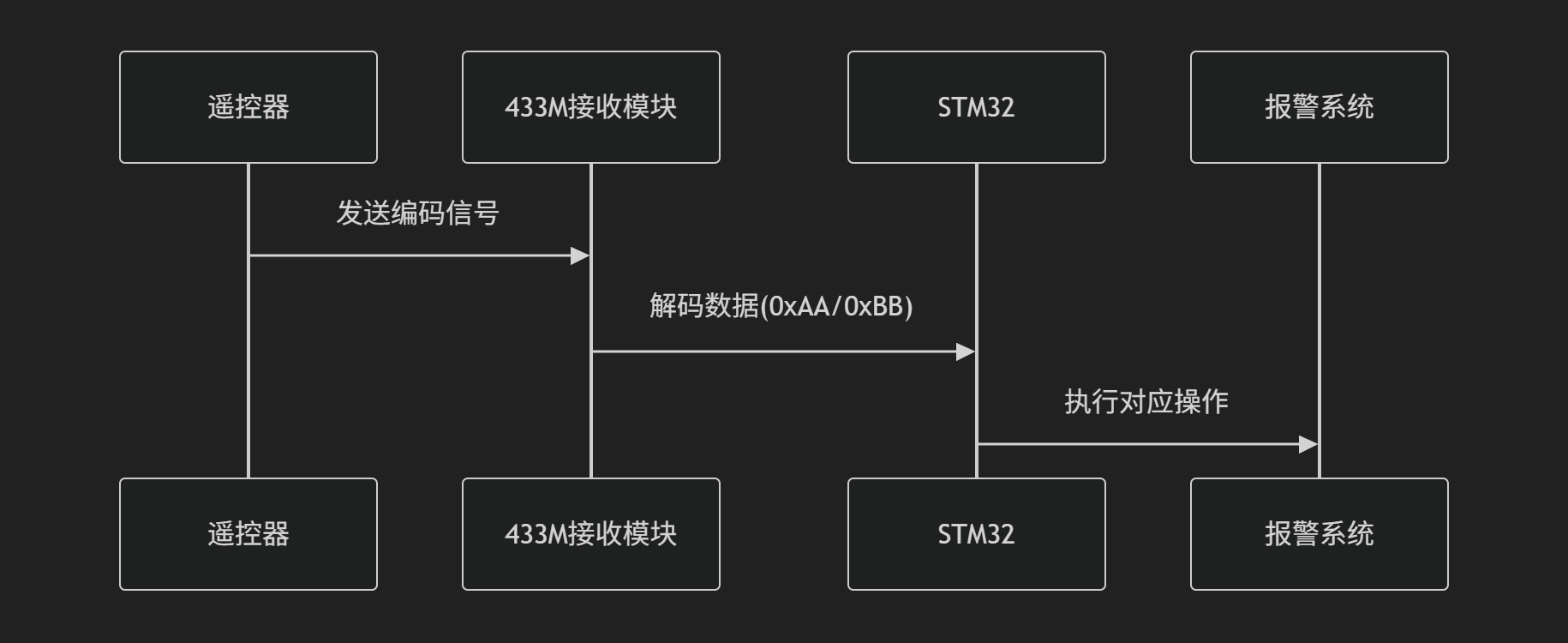
}2.2 433M无线通信模块
通信协议分析:
驱动代码:
#define CMD_ARM 0xAA // 布防指令
#define CMD_DISARM 0xBB // 撤防指令void rf433_init(void) {// 配置USART1为433M模块通信接口huart1.Instance = USART1;huart1.Init.BaudRate = 4800;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;HAL_UART_Init(&huart1);
}void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {if(huart->Instance == USART1) {uint8_t cmd = rf433_rx_buffer[0];if(cmd == CMD_ARM) {