DR200差速移动机器人的多功能感知系统与多场景应用
DR200差速移动机器人平台是一款基于室内平地的差速转向移动机器人底盘,主要针对教育教学、超市移动促销、无人配送、室内仓储、室内巡检、物流搬运等行业。整套底盘采用了4个万向轮和双驱动轮差速驱动结构,间驱动轮带直流无刷伺服电机。整套结构采用了摆式独立悬挂。不但可以平衡前后脚轮的着地,还能够极大地防止打滑。并且差速移动机器人底盘内置单线激光雷达、线控系统、深度相机以及超声波传感器等硬件实现自动避障、自主路径规划等功能。在无人干预的情况下自主完成各项任务,真正做到安全、高效、智能运行。

一、DR200差速移动机器人的多功能感知系统
1、视觉识别系统,在 DR200 差速移动机器人的 “感知体系” 中,视觉识别系统如同机器人的 “智慧双眼”,凭借精准的图像采集与智能分析能力,打破传统单一传感器的感知局限,为机器人在教育科研、商业服务、工业场景中的复杂任务提供核心视觉支撑。作为 DR200 传感系统的重要组成部分,该视觉识别系统以深度相机为核心硬件,结合算法优化与开源生态支持,实现从 “看见” 到 “看懂” 的跨越,实现对人或物体的识别等功能,其次就是我们还可以根据需要发挥想象去开发它的DIY功能(列如:果蔬采摘机器人等都具有强大的视觉识别功能)。

2、深度感知系统,在差速转向移动机器人的感知体系中,深度感知系统是实现 “三维空间认知” 的核心,相当于为机器人赋予 “判断距离、感知立体形态” 的能力。移动机器人的深度感知系统通过专属硬件与算法协同,突破传统 2D 感知的局限,精准获取环境中物体的深度坐标与三维轮廓,为机器人在复杂室内场景中的自主导航、目标交互、安全避障提供关键数据支撑,成为连接机器人与物理空间的重要纽带。
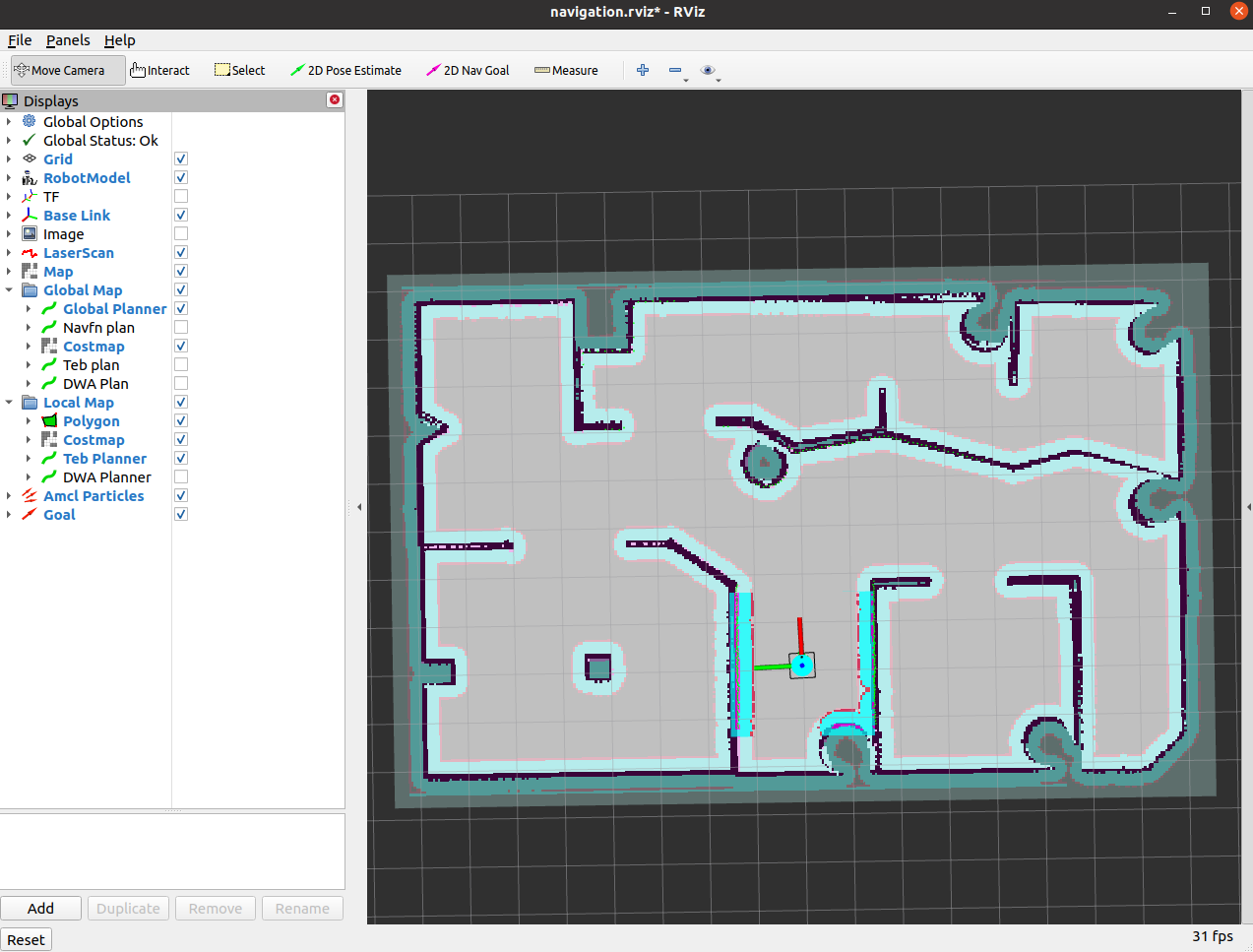
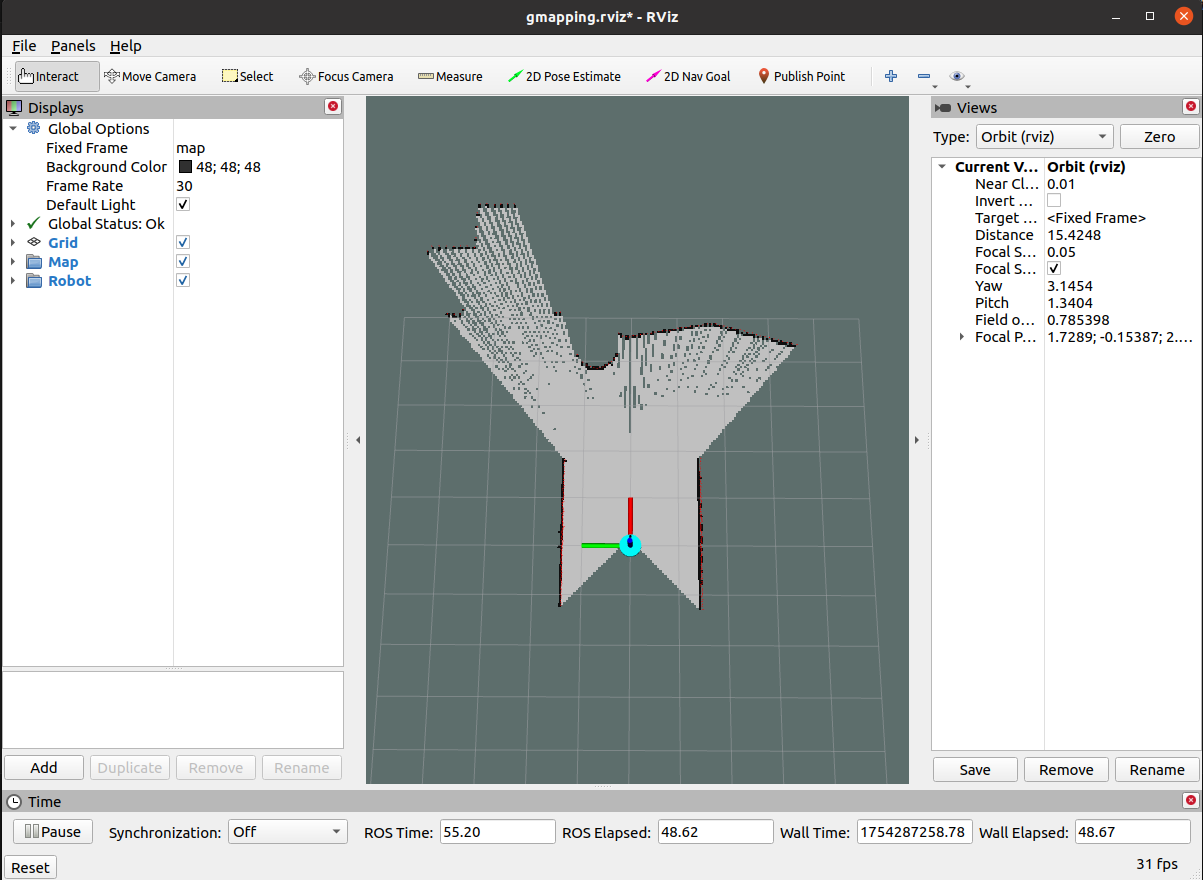
普蓝DR200差速移动机器人内置的工控机、单线激光雷达、线控系统、深度相机以及超声波传感器等一系列先进的硬件。在这些强大硬件协同工作下,使得 DR200 具备了强大的环境感知和智能决策能力。单线激光雷达通过快速扫描周围环境,构建精确的地图模型;深度相机则像机器人的眼睛一样,能够精准识别物体的形状、位置和距离;超声波传感器实时监测周围障碍物,一旦检测到危险,立即发出警报并调整机器人的行动路线。通过这些传感器的紧密配合,DR200 可以实现自动避障、路径规划等复杂功能,在无人干预的情况下自主完成各项任务,真正做到安全、高效、智能运行。
二、DR200差速移动机器人的多场景应用
1、教育教学与科学研究:对于高校和科研院所来说,DR200 是开展 ROS 教育、AI 教育、机器视觉、大模型等研究项目的理想机器人底盘工具。学生和科研人员可以基于 DR200 开放的平台,深入学习和研究机器人的运动控制、环境感知、智能决策等关键技术,通过实际操作和实验验证,培养创新思维和实践能力,推动相关领域的科研进展。
2、超市移动促销:在超市等商业场所,DR200 可以作为移动促销的新利器。它能够在货架间自由穿梭,通过搭载的显示屏和语音播报系统,向顾客展示商品信息、推荐优惠活动,吸引顾客的注意力,提高商品的销售量。同时,其灵活的移动能力可以根据超市的布局和顾客流量实时调整促销位置,实现精准营销。
3、无人配送:随着电商行业的快速发展,无人配送需求日益增长。DR200 凭借其稳定的性能、精准的定位和高效的避障能力,能够在室内环境中准确地将货物送到客户手中。无论是在写字楼、酒店还是居民小区,DR200 都可以轻松应对复杂的室内布局,实现快速、安全的配送服务,有效降低人力成本,提升配送效率。
4、室内仓储与物流搬运:在仓储物流领域,DR200 更是大显身手。它可以在仓库中自主搬运货物,根据系统指令准确地将货物放置到指定位置,实现仓储物流的自动化管理。其强大的负载能力和灵活的转向性能,能够适应不同尺寸和重量的货物搬运需求,大大提高了仓储物流的作业效率和准确性,减少了货物损坏和丢失的风险。
室内差速转向移动机器人 DR200 以其独特的设计、强大的功能和广泛的应用场景,为企业和科研机构提供了高效、智能的解决方案。相信在未来,随着技术的不断进步和应用的深入拓展,DR200 将在更多领域发挥重要作用,助力各行业实现智能化升级和创新发展。