深度学习——常见的神经网络
文章目录
- 一、FNN
- 1.1原理
- 1.2代码
- 二、CNN
- 2.1原理
- Step1:提取图片特征(+padding)
- Step2:池化
- Step3:扁平化处理
- 2.2代码
- 三、RNN
- 3.1CNN的问题
- 3.2原理
- 3.3代码
- 四、LSTM
- 4.1RNN的问题
- 4.2原理
- 4.3代码
- 五、GRU
- 5.1原理
- 5.2代码
一、FNN
1.1原理
前馈神经网络(Feedforward Neural Network, FNN) 是最基础、最常见的人工神经网络结构。
其核心思想是:信息从输入层开始,经过若干个隐藏层的非线性变换,最终到达输出层,且信号只沿单向传播,不会形成循环。因此,FNN 又常被称为 多层感知机(MLP, Multi-Layer Perceptron)。
输入层(Input Layer):接收原始数据特征,维度 = 输入特征数量。不进行计算,只负责数据传递。隐藏层(Hidden Layer):一个或多个隐藏层,每层由多个神经元组成。
单层神经元计算:
a=f(z)=f(W⋅x+b)a = f(z)=f( W \cdot x + b)a=f(z)=f(W⋅x+b)
其中:
- WWW :权重矩阵;xxx :输入向量;bbb :偏置;
- fff :激活函数(如 ReLU, Sigmoid, Tanh 等);aaa :神经元输出
多层网络(第 lll 层):
a(l)=f(W(l)⋅a(l−1)+b(l))a^{(l)} = f(W^{(l)} \cdot a^{(l-1)} + b^{(l)})a(l)=f(W(l)⋅a(l−1)+b(l))
输出层(Output Layer):将隐藏层结果映射到任务需求的输出维度。- 分类:Softmax 输出概率分布
- 回归:线性输出
FNN 的训练主要依靠 反向传播(Backpropagation, BP) + 梯度下降(Gradient Descent):
- 前向传播:计算预测输出。
- 计算损失:衡量预测值与真实值的误差(如 MSE, Cross-Entropy)。
- 反向传播:通过链式法则计算梯度。
- 参数更新:使用梯度下降(或优化器,如 Adam、SGD)更新参数。
1.2代码
class FNN(nn.Module):def __init__(self, input_size=10, hidden_size=32, output_size=2):super(FNN, self).__init__()self.fc1 = nn.Linear(input_size, hidden_size) # 输入层 → 隐藏层self.relu = nn.ReLU()self.fc2 = nn.Linear(hidden_size, output_size) # 隐藏层 → 输出层def forward(self, x):out = self.fc1(x)out = self.relu(out)out = self.fc2(out)return out
- input_size:每条输入数据的特征数量,也就是输入向量的长度。
- hidden_size:隐藏层中神经元的数量。
- output_size:输出层神经元的数量,决定网络的最终输出维度。
- 分类任务:输出神经元数量 = 类别数。例如二分类 → output_size = 2,三分类 → output_size = 3。
- 回归任务:输出神经元数量 = 需要预测的值的数量。
二、CNN
参考视频
https://www.bilibili.com/video/BV1MsrmY4Edi/?spm_id_from=333.337.search-card.all.click&vd_source=67ba3568cbf6ea1d930339cd0f2092ba
2.1原理
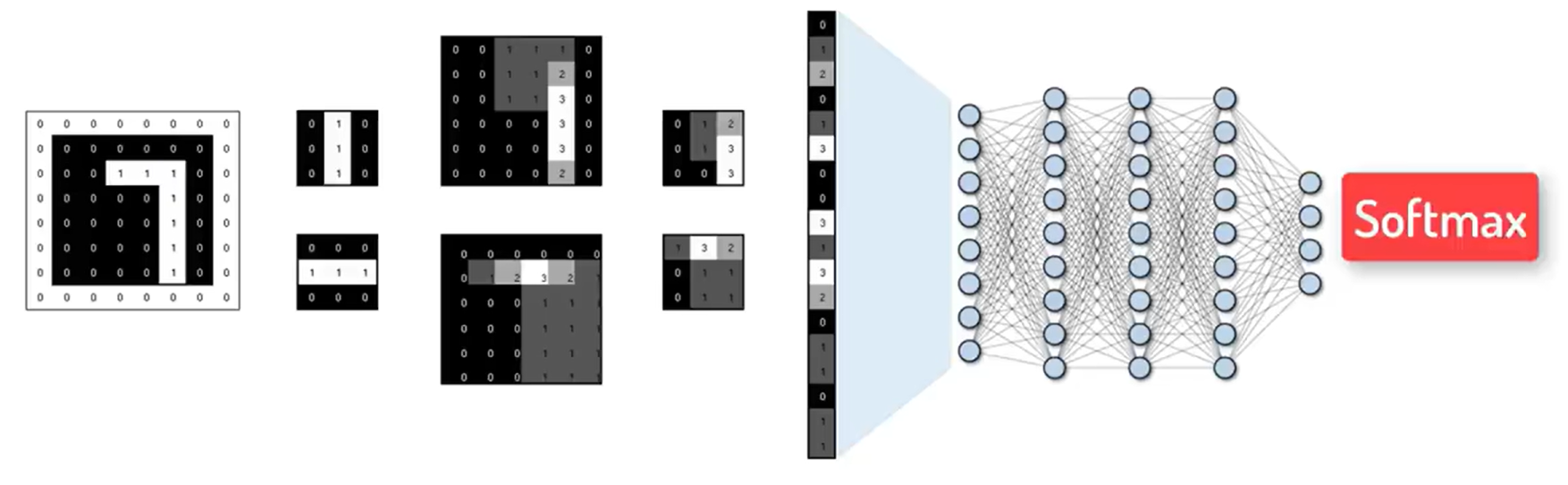
Step1:提取图片特征(+padding)
使用卷积核(特征过滤器)进行特征提取。
- 卷积核有2个,则会生成2张特征图
- 卷积核有多少个,就会生成多少张特征图

提取特征的计算规则:

滑动窗口:卷积核在输入图像上按照一定的步长(Stride)滑动,每次滑动都会计算一次卷积操作,得到特征图上的一个值。例如,步长为 1 时,卷积核每次移动一个像素;步长为 2 时,卷积核每次移动两个像素。局部感知:卷积核的尺寸通常远小于输入图像的尺寸,这意味着它在每次运算时只关注图像的一个局部区域,从而提取局部特征。权值共享:无论卷积核滑动到图像的哪个位置,其权值都保持不变,整个图像上是共享。这样大大减少了模型的参数数量,降低了计算复杂度,同时也提高了模型的泛化能力。
最终结果如下:原来66的图片被特征提取之后,大小变成了44,并且边缘特征都丢失了。

Padding:扩充0。使得原来6*6的图片在扩充之后边缘信息能被成功提取。
其主要的作用有:1、保持特征图尺寸2、保护边缘信息。其计算方法不展开叙述。
Step2:池化
池化操作与卷积类似,通过滑动窗口在特征图上移动,对每个窗口内的像素进行聚合计算。常见的有最大池化和平均池化。
池化的主要作用有1、保留边缘、纹理等显著特征2、将图片的大小变小:8 * 8的图片变成了4 * 4。

Step3:扁平化处理
将多维的输入数据拉平转换为一维向量 。
在 CNN 中,经过一系列卷积和池化操作后,输出的特征图通常是具有高度、宽度和通道数的三维张量(形状如 [batch_size, height, width, channels] );在 RNN 处理序列数据时,输出也可能是多维张量。而全连接层要求输入是一维向量,扁平化处理就是为了满足全连接层的输入要求。

2.2代码
class CNN(nn.Module):def __init__(self):super(CNN, self).__init__()self.conv1 = nn.Sequential( nn.Conv2d(in_channels=1, out_channels=16, kernel_size=5, stride=1, padding=2, ), nn.ReLU(), nn.MaxPool2d(kernel_size=2), )self.conv2 = nn.Sequentialnn.Conv2d(16, 32, 5, 1, 2), nn.ReLU(), nn.MaxPool2d(2), )self.out = nn.Linear(32 * 7 * 7, 10) def forward(self, x):x = self.conv1(x)x = self.conv2(x)x = x.view(x.size(0), -1) output = self.out(x)return output
in_channels:输入的通道数(输入图片的“深度”)。- 灰度图:1 通道
- RGB彩色图:3 通道
out_channels:卷积核(滤波器)的数量,也就是输出的特征图(feature map)的数量kernel_size:卷积核的大小。- 如果写成整数 3,表示是 3x3 的卷积核。
- 如果写成元组 (3, 5),就是 3x5 的卷积核。
stride:卷积的步幅。stride=1 表示卷积核每次滑动 1 个像素。如果 stride=2,就是每次跨 2 个像素,输出的特征图尺寸会缩小一半。padding:在输入的边缘补零(zero padding),用来控制输出大小。
| 过程 | 图片信息 |
|---|---|
| 输入 | (batch_size, 1, 28, 28) |
| conv1+ReLu | (batch_size, 16, 28, 28) |
| pool | (batch_size, 16, 14, 14) |
| conv2+ReLu | (batch_size, 32, 14, 14) |
| pool | (batch_size, 32, 7, 7) |
| flatten | (batch_size, 10) |
三、RNN
3.1CNN的问题
CNN的优点:
- 局部感受野:捕捉局部模式(如边缘、纹理)
- 权重共享:减少参数量
- 空间不变性:平移不影响特征提取
局限:
- 只能捕捉固定大小局部特征,对长距离依赖不敏感
- 不适合序列数据(文本、时间序列、语音等),因为 CNN 处理长序列需要非常深的网络才能捕捉远距离依赖。
3.2原理
RNN的核心思想:网络的隐藏状态记录历史信息,每个时间步的输出依赖当前输入和之前的隐藏状态。

隐藏状态是 RNN 的“记忆”,记录了从序列开头到当前时间步的历史信息。它本身不一定直接就是任务输出。维度通常是 hidden_size
隐藏状态更新: ht=f(Wxhxt+Whhht−1+bh)h_t = f(W_{xh} x_t + W_{hh} h_{t-1} + b_h)ht=f(Wxhxt+Whhht−1+bh)
- WxhxtW_{xh} x_tWxhxt 本质上就是对当前输入 xtx_txt做了全连接
- xtx_txt:当前输入
- WxhW_{xh}Wxh:权重矩阵
- Whhht−1W_{hh} h_{t-1}Whhht−1本质上就是对 上一时间步隐藏状态 ht−1h_{t-1}ht−1做了全连接
- ht−1h_{t-1}ht−1:上一个时间步的隐藏状态
- WhhW_{hh}Whh:权重矩阵
- bhb_hbh:偏置
- fff:激活函数(如
tanh或ReLU)
将隐藏状态经过 线性映射 + 激活函数 得到最终输出:
yt=g(Whyht+by)y_t = g(W_{hy} h_t + b_y)yt=g(Whyht+by)
3.3代码
class RNNClassifier(nn.Module):def __init__(self, input_size=28, hidden_size=128, num_layers=2, num_classes=10):super(RNNClassifier, self).__init__()self.hidden_size = hidden_sizeself.num_layers = num_layers# RNN 输入: input_size=28, 输出 hidden_sizeself.rnn = nn.RNN(input_size=input_size, hidden_size=hidden_size,num_layers=num_layers, batch_first=True)# 输出层self.fc = nn.Linear(hidden_size, num_classes)def forward(self, x):# x.shape = (batch, 1, 28, 28)x = x.squeeze(1) # 去掉通道维度, (batch, 28, 28)# 初始化隐藏状态h0 = torch.zeros(self.num_layers, x.size(0), self.hidden_size).to(x.device)# RNN 前向传播out, _ = self.rnn(x, h0) # out: (batch, seq_len=28, hidden_size)out = out[:, -1, :] # 取最后一个时间步out = self.fc(out)return out
时间步 time step:指序列中每一个单独的输入点。假设一句话是 “HELLO”,则每个字母是一个时间步,共5个时间步。input_size:每个时间步输入的特征维度。每张图 28x28,我们把每一行的28个像素当作一个时间步。序列长度 seq_len:一共有28个时间步。因此序列长度为28.hidden_size:hidden_size 想象成 RNN 的记忆容量。数值越大,网络容量越强,但参数更多,计算量更大。hth_tht是 hidden_size 维的向量。num_layers:RNN 堆叠的层数- num_layers=1 → 单层 RNN
- num_layers>1 → 多层 RNN,每一层的输出作为下一层的输入
batch_first:指定输入和输出张量的维度顺序- True → 输入和输出张量形状为 (batch_size, seq_len, input_size)
- False → 输入和输出张量形状为 (seq_len, batch_size, input_size)
整体 X 是 (batch_size, seq_len, input_size)。RNN 内部会把序列拆开,每个时间步输入:
| 名称 | 形状 | 说明 |
|---|---|---|
| 单时间步xt单时间步x_t单时间步xt | (batch_size, input_size) | 当前时间步输入向量,送入RNNcell |
| 隐藏状态ht隐藏状态h_t隐藏状态ht | (batch_size, hidden_size) | 当前时间步的隐藏状态 |
| 输出yt输出 y_t输出yt | (batch_size, output_size) | 当前时间步输出(分类概率等) |
四、LSTM
4.1RNN的问题
RNN 的问题:
- 梯度消失 / 梯度爆炸:时间步太长时,梯度在反向传播中可能衰减得太快或爆炸。
- 训练慢:必须按时间步循环计算,难以完全并行。
- 长序列依赖难:标准 RNN 难以捕捉很长的依赖关系。
参考视频
https://www.bilibili.com/video/av15997678?spm_id_from=333.788.videopod.episodes&aid=15997678&vd_source=67ba3568cbf6ea1d930339cd0f2092ba&p=21


4.2原理
为了解决这个问题,LSTM (long-short term memory)引入了一种门控机制来控制信息的“遗忘、记忆和输出”。

LSTM 在结构上比 RNN 多了一条细胞状态(cell state,记忆线),像是一条传送带,能让信息更容易在序列中流动。 它通过三个门来调控信息流动:
遗忘门(Forget Gate):决定哪些历史信息要丢掉。
ft=σ(Wf⋅[ht−1,xt]+bf)f_t = \sigma(W_f \cdot [h_{t-1}, x_t] + b_f)ft=σ(Wf⋅[ht−1,xt]+bf)- 输入:上一步隐藏状态 (h_{t-1}) 和当前输入 (x_t)
- 输出:一个 0~1 之间的向量,接近 0 表示遗忘,接近 1 表示保留
输入门(Input Gate):决定哪些新信息要存入记忆。
it=σ(Wi⋅[ht−1,xt]+bi)i_t = \sigma(W_i \cdot [h_{t-1}, x_t] + b_i)it=σ(Wi⋅[ht−1,xt]+bi) C~t=tanh(WC⋅[ht−1,xt]+bC)\tilde{C}_t = \tanh(W_C \cdot [h_{t-1}, x_t] + b_C)C~t=tanh(WC⋅[ht−1,xt]+bC)- iti_tit:控制要写入多少新信息
- C~t\tilde{C}_tC~t:候选的新记忆
更新细胞状态:结合遗忘门和输入门,更新记忆:
Ct=ft∗Ct−1+it∗C~tC_t = f_t * C_{t-1} + i_t * \tilde{C}_tCt=ft∗Ct−1+it∗C~t输出门(Output Gate):决定输出多少信息作为隐藏状态 (h_t)。
ot=σ(Wo⋅[ht−1,xt]+bo)o_t = \sigma(W_o \cdot [h_{t-1}, x_t] + b_o)ot=σ(Wo⋅[ht−1,xt]+bo) ht=ot∗tanh(Ct)h_t = o_t * \tanh(C_t)ht=ot∗tanh(Ct)
在每个时间步 ttt:
- 遗忘门决定丢掉多少旧信息;
- 输入门决定接收多少新信息;
- 更新细胞状态 CtC_tCt,相当于“长期记忆”;
- 输出门生成新的隐藏状态 hth_tht,作为“短期记忆”,传给下一步。
LSTM 的优势:
- 能有效缓解 RNN 的梯度消失问题;
- 可以记住长期依赖信息(比如一段话开头的信息影响后面很远的词);
- 在 NLP、语音识别、时间序列预测等任务上表现良好。
4.3代码
其代码和CNN类似:
class LSTMClassifier(nn.Module):def __init__(self, input_size=50, hidden_size=128, num_layers=2, num_classes=2):super(LSTMClassifier, self).__init__()self.lstm = nn.LSTM(input_size=input_size,hidden_size=hidden_size,num_layers=num_layers,batch_first=True) # 输入格式 (batch, seq_len, input_size)self.fc = nn.Linear(hidden_size, num_classes)def forward(self, x):# h0, c0 默认初始化为 0out, _ = self.lstm(x) # out: (batch, seq_len, hidden_size)out = out[:, -1, :] # 取最后一个时间步的隐藏状态out = self.fc(out) # 全连接层分类return out
五、GRU
5.1原理
普通 RNN 难以捕捉长距离依赖,易出现梯度消失/爆炸。GRU(2014, Cho 等)通过门控机制控制信息流动,像 LSTM 一样缓解长依赖问题,但结构更简洁、参数更少、训练更快。

GRU 只有一个状态(隐藏状态hth_tht),没有像 LSTM 那样独立的细胞状态 CtC_tCt。它通过两个门来调控:
更新门(Update Gate):决定保留多少旧信息、引入多少新信息。
zt=σ(Wzxt+Uzht−1+bz)z_t=\sigma(W_z x_t+U_z h_{t-1}+b_z)zt=σ(Wzxt+Uzht−1+bz)- zt≈0z_t \approx 0zt≈0:几乎复制 ht−1h_{t-1}ht−1,保留长程记忆。
- zt≈1z_t \approx 1zt≈1:几乎采用 h~t\tilde{h}_th~t,快速更新为新状态。
重置门(Reset Gate):决定在计算候选状态时,旧信息参与多少。
rt=σ(Wrxt+Urht−1+br)r_t=\sigma(W_r x_t+U_r h_{t-1}+b_r)rt=σ(Wrxt+Urht−1+br)- rt≈0r_t \approx 0rt≈0:近似抛开历史,只看当前输入 xtx_txt。
- rt≈1r_t \approx 1rt≈1:结合历史与当前信息更新状态。
候选隐藏状态
h~t=tanh(Whxt+Uh(rt⊙ht−1)+bh)\tilde{h}_t=\tanh\!\big(W_h x_t+U_h\,(r_t\odot h_{t-1})+b_h\big)h~t=tanh(Whxt+Uh(rt⊙ht−1)+bh)最终状态更新(线性插值)
ht=(1−zt)⊙ht−1+zt⊙h~th_t=(1-z_t)\odot h_{t-1}+z_t\odot \tilde{h}_tht=(1−zt)⊙ht−1+zt⊙h~t
与 LSTM 的对比:
| 方面 | GRU | LSTM |
|---|---|---|
| 状态 | 只有 hth_tht | 有 CtC_tCt(细胞)和 hth_tht |
| 门的数量 | 2 个(更新、重置) | 3 个门 + 候选(遗忘、输入、输出 + 候选) |
| 参数量 | 约 3×(D·H + H² + H) | 约 4×(D·H + H² + H) |
| 速度/内存 | 更快、更省 | 略慢、略占内存 |
| 记忆力 | 通常与 LSTM 接近 | 某些长依赖任务可能更稳 |
5.2代码
class GRUClassifier(nn.Module):def __init__(self, input_size, hidden_size, num_layers, num_classes, bidirectional=False):super().__init__()self.gru = nn.GRU(input_size=input_size,hidden_size=hidden_size,num_layers=num_layers,batch_first=True,bidirectional=bidirectional)factor = 2 if bidirectional else 1self.fc = nn.Linear(hidden_size * factor, num_classes)def forward(self, x): out, h_n = self.gru(x) feat = out[:, -1, :] logits = self.fc(feat) return logits
上述原理图片来源:
https://github.com/NLP-LOVE/ML-NLP/blob/master/Deep%20Learning/12.2%20LSTM/README.md