【论文解读】DDRNet:深度双分辨率网络在实时语义分割中的结构与原理全面剖析
【论文解读】DDRNet:深度双分辨率网络在实时语义分割中的结构与原理全面剖析
原论文:Deep Dual-Resolution Networks for Real-Time and Accurate Semantic Segmentation of Road Scenes(Hong et al., 2021)([arXiv][1])
博客 / Author:一颗白菜2021
文章目录
- 快速概览
- 研究背景与动机
- DDRNet 整体结构介绍
- 核心模块详解
- 双分辨率并行分支设定
- 多级双向融合(Bilateral Fusion)
- DAPPM:Deep Aggregation Pyramid Pooling Module
- 架构演进与网络版本(-slim / DDRNet-23 / DDRNet-39)
- 实验效果:精度 vs 实时性能对比
- 深入原理:为什么这种设计有效?
- 代码实现与复现建议(参考 Github 与超参配置)
- 工程落地建议:FP16、BatchNorm 稳定、小目标表现优化
- 可视化方式与调试思路
- 优缺点剖析与潜在扩展方向
1. 快速概览
- 结构:DDRNet 采用两个并行的网络分支――一个保留高分辨率细节,一个处理低分辨率上下文信息,并通过多次双向融合模块互相传递信息;
- 关键模块:DAPPM 被引入低分支,用于多尺度上下文融合;
- 成果:Cityscapes 测试集上 DDRNet-23-slim 达到 77.4% mIoU @ 102 FPS;CamVid 上为 74.7% mIoU @ 230 FPS;在实时语义分割中获得极佳的精度与速度平衡。
2. 为什么要做 DDRNet?
- 自动驾驶等任务对语义分割提出严苛要求:既要保证边界与小目标细节不丢失,也要保证实时推理速度;
- 传统高精度方法(如 DeepLab)速度慢,实时性能差;而轻量实时方法(如 BiSeNet)精度不高;
- DDRNet 通过“双分辨率并行 + 多融合 + 上下文增强”实现双重目标:精度与速度兼得。
3. DDRNet 整体结构介绍
----------------------------------------------------------网络结构-------------------------------------------------------------
 Deep Aggregation Pyramid Pooling Module.
Deep Aggregation Pyramid Pooling Module.
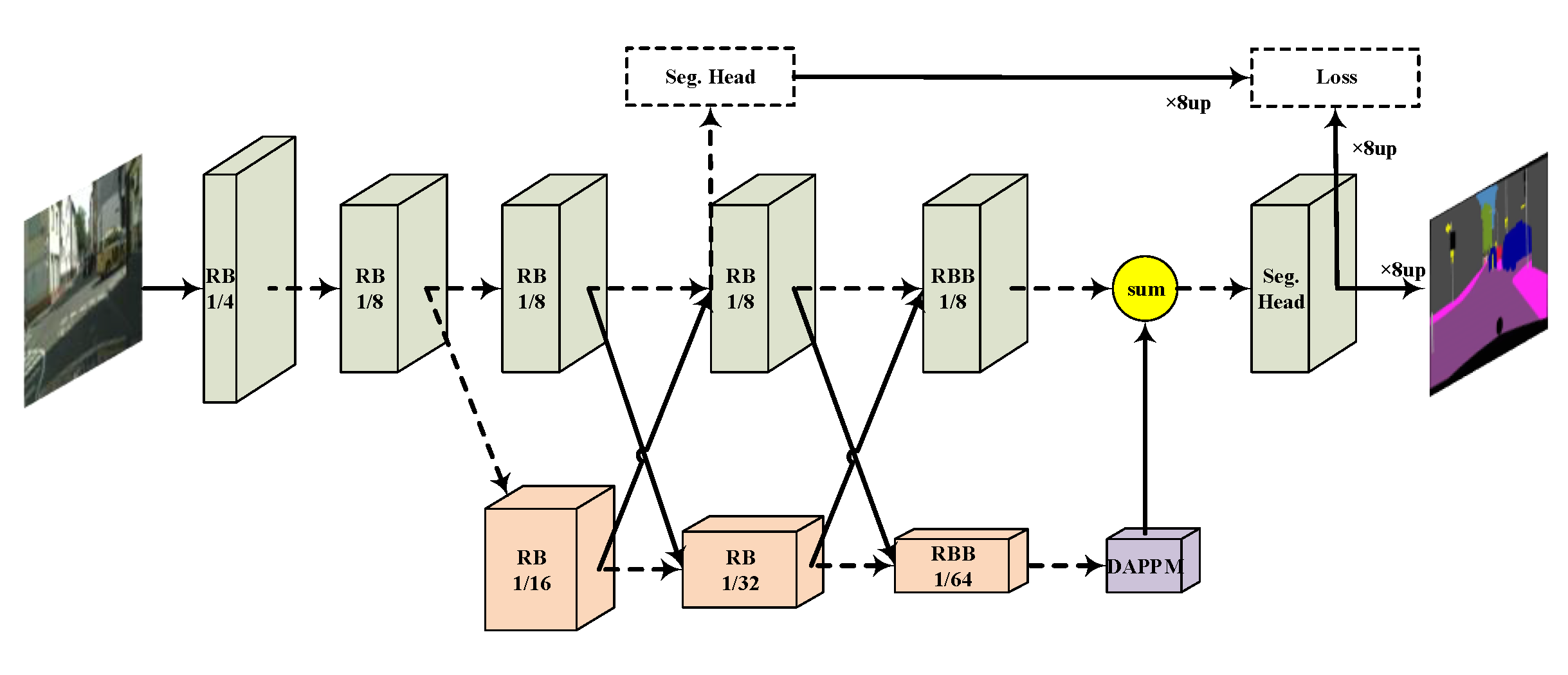
图注:图:DDRNet 整体架构(高分支 + 低分支 + 多次 Bilateral Fusion + DAPPM)。
从图中可以看到:
- 输入图像经过浅层特征抽取后被“劈叉”到两个分支;
- 高分辨率分支保持较大空间分辨率,在多个阶段保留图像细节;
- 低分辨率分支逐步抽象、减小空间分辨率,但提升感受野与语义表达能力;
- 分支之间在多个阶段通过 双向融合(Bilateral Fusion) 机制互相补充细节与语义;
- 在低分支尾部加入 DAPPM 模块 进行多尺度上下文融合;
- 最后,融合后的特征进入 segmentation head 做 dense prediction。
4. 核心模块详解
4.1 双分辨率并行分支架构
- 高分辨率分支(detail branch)保持输入的相对高空间分辨率(例如原始尺寸的 1/4),用于精细边界和小目标表达;
- 低分辨率分支(semantic branch)通过下采样构建大感受野,用于语义理解;
- 两支都由 Residual Basic Blocks / Bottleneck Blocks 组成,深度与通道数根据版本不同略有差异。
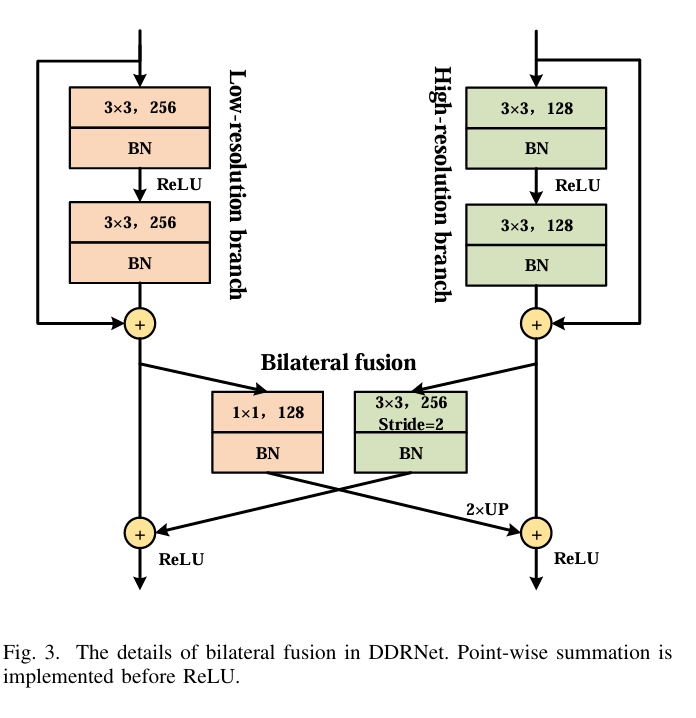
4.2 多级双向融合(Bilateral Fusion)
-
在多个阶段,两支网络进行特征交换:
- detail-to-semantic:高分辨率特征下采样并加入低分支;
- semantic-to-detail:低分辨率特征上采样后加入高分支;
-
这种机制允许细节与语义在多个层级互补融合,大幅提升预测精度,尤其在边界和小物体上。
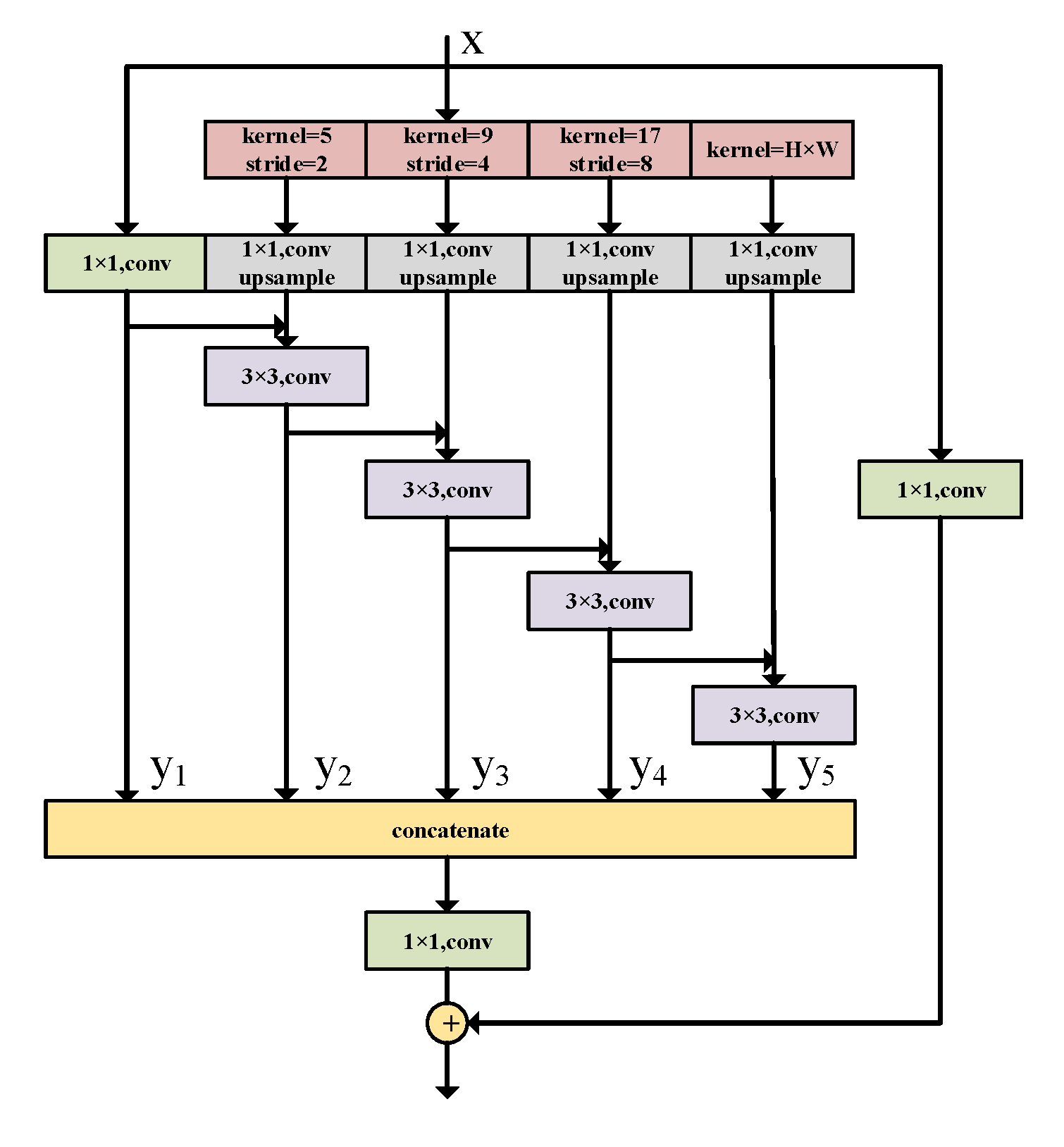
4.3 DAPPM(Deep Aggregation Pyramid Pooling Module)
- 被加在低分辨率分支的尾部,用于多尺度上下文融合;
- 通过多个不同尺度(大小)的 pooling 提取语义,并融合,再送到 segmentation head;
- 有效扩大感受野、融合背景/物体级语义,提升整体 mIoU。
5. 网络版本演进
- DDRNet-23-slim:轻量版本,速度最快,适合资源受限场景(77.4% mIoU @ 102FPS);
- DDRNet-23:通用版本,精度更高(约 79.4% mIoU);
- DDRNet-39:更深结构,精度最高(最高达 80.4–82.4% mIoU 使用 test-time augmentation)。
6. 实验结果对比(Cityscapes / CamVid)
- Cityscapes:DDRNet-23-slim 的 mIoU 77.4%,推理速度 102 FPS;DDRNet-39 + 多尺度/翻转增强达 ~80–82% mIoU,仍保持高速。
- CamVid:DDRNet-23-slim 达到 74.7% mIoU, 推理速度高达 230 FPS。
(如你喜欢,博客后续可加入与 BiSeNet / DeepLab 的对比表格)
7. 为什么这种结构有效?
- 并行保分 & 下语义:高分支维护细节,低分支捕捉上下文,兼顾效率与精度;
- 多层次双向融合强化信息交互:让 detail branch 可以“感知”全局语义,semantic branch可以“感知”空间细节;
- DAPPM 提供上下文补充与尺度多样性:在低分支末端补充 pyramid pooling 机制,有效增强高语义推理能力;
- 多个版本满足不同部署需求:slim/23/39 灵活适配实时或精度导向场景;
- 对工程友好:结构清晰、双分支设计易扩展,社区复现容易(GitHub 初始仓库已有 443 stars)
8. 复现建议与代码框架指南
GitHub 官方代码:ydhongHIT/DDRNet,包含预训练模型 & cityscapes configs。
建议实现结构:
backbone/├─ stage1-3 of high/low branches + fusion layers├─ DAPPM module
decoder/└ segmentation head
train.py / eval_speed.py
训练技巧:
- 保持
align_corners=False,与预训练模型一致; - 使用 class-balanced sampling + OHEM + 1024×1024 crop;
- 可用 poly lr 衰减,warmup,batch 合理配置以稳定 BN。
9. 工程落地建议与优化技巧
- 推理部署:推荐 FP16 inference,或使用 TensorRT/ONNX 模型加速;
- BatchNorm 小批量稳定性:建议使用 SyncBN 或 GroupNorm,特别是单卡 batch 小的情况下;
- 细节优化:可视化 high branch 和融合后输出,对小目标如 pole/class 边界进行判断;
- Test-Time Augmentation:多尺度 + 翻转增强可进一步提升精度,尤其在 DDRNet-39 上效果明显。
10. 可视化建议与调试思路
- 融合层特征图可视化:显示 detail vs semantic 分支融合前/后的激活,看信息融合效果;
- DAPPM 多尺度语义图:观察 pyramid pooling 输出对 predictions 的贡献;
- 错误分析:生成 confusion matrix 评估 small vs large object 上的误分情况;
- 版本对比展示:slim / 23 / 39 在同一图像上的预测结果对比直观展示模型能力差异。
11. 优点与局限 & 未来扩展
优点:
- 卓越速度与精度平衡;
- 结构模块化、易扩展;
- 社区预训练模型可用,复现容易。
局限:
- 没有 FLOPs/参数量清晰表格;
- 与 Transformer 的融合尚未尝试;
- 对非常小细节或夜间低光条件效果未专门分析。
未来方向:
- 在融合模块加入 attention,如 CBAM、Transformer 融合;
- 基于 NAS 自动搜索最佳双分支结构;
- 模型剪枝或量化以部署到边缘设备。