初识CNN01——认识CNN
文章目录
- 一、CNN是什么?
- 1.1 概念
- 1.2 卷积思想
- 二、卷积层
- 2.1 卷积核
- 2.2 卷积计算
- 2.3 padding&stride
- 2.4 多通道卷积
- 2.5 特征图大小
- 2.6 api
- 三、池化层
- 3.1 概述
- 3.2 池化层计算
- 3.3 多通道池化
- 3.4 池化层的作用
- 3.5 API
- 总结
一、CNN是什么?
1.1 概念
卷积神经网络(Convolutional Neural Network,CNN)是含有卷积层的神经网络. 卷积层的作用就是用来自动学习、提取图像的特征。是一种专门用于处理具有网格状结构数据的深度学习模型。最初,CNN主要应用于计算机视觉任务,但它的成功启发了在其他领域应用,如自然语言处理等。
CNN网络主要有三部分构成:卷积层、池化层和全连接层构成,其中卷积层负责提取图像中的局部特征;池化层用来大幅降低运算量并特征增强;全连接层类似神经网络的部分,用来输出想要的结果。
- 应用场景
| 领域 | 典型应用 | 代表模型 |
|---|---|---|
| 计算机视觉 | 图像分类、目标检测、语义分割 | ResNet, YOLO, U-Net |
| 医疗影像 | 肿瘤检测、X光片分析 | CheXNet |
| 自动驾驶 | 车道线识别、交通标志检测 | Tesla HydraNet |
| 自然语言处理 | 文本分类、机器翻译(位置特征提取) | Char-CNN |
| 人脸识别 | 人脸验证、活体检测 | FaceNet |
-
全连接的局限性
全连接神经网络并不太适合处理图像数据,在计算机视觉领域, 往往我们输入的图像都很大,使用全连接网络的话,计算的代价较高。另外全连接神经网络会将图像展开,破坏像素之间的相对位置关系,图像很难保留原有的特征,导致图像处理的准确率不高。

-
与传统网络的区别

1.2 卷积思想
- 概念
卷积(Convolution),输入信息与卷积核(滤波器,Filter)的乘积。 卷:从左往右,从上往下;积:乘积,求和。 - 局部连接
- 局部连接可以更好地利用图像中的结构信息,空间距离越相近的像素其相互影响越大。
- 根据局部特征完成目标的可辨识性。
- 权重共享
- 图像从一个局部区域学习到的信息应用到其他区域。
- 减少参数,降低学习难度。
二、卷积层
2.1 卷积核
卷积核是卷积运算过程中必不可少的一个“工具”,在卷积神经网络中,卷积核是非常重要的,它们被用来提取图像中的特征。
卷积核可以看作是一个矩阵,有以下几方面的特征:
- 卷积核的个数:卷积核(过滤器)的个数决定了其输出特征矩阵的通道数。
- 卷积核的值:卷积核的值是初始化好的,后续进行更新。
- 卷积核的大小:常见的卷积核有1×1、3×3、5×5等,一般都是奇数 × 奇数。
下图就是一个3×3的卷积核:

2.2 卷积计算
- 计算过程
卷积的过程是将卷积核在图像上进行滑动计算,每次滑动到一个新的位置时,卷积核和图像进行点对点的计算,并将其求和得到一个新的值,然后将这个新的值加入到特征图中,最终得到一个新的特征图。

- input 表示输入的图像
- filter 表示卷积核, 也叫做滤波器
- input 经过 filter 的得到输出为最右侧的图像,该图叫做特征图
卷积运算本质上就是在滤波器和输入数据的局部区域间做点积。
具体计算步骤如下:

左上角的点计算方法:

按照上面的计算方法可以得到最终的特征图为:

卷积的重要性在于它可以将图像中的特征与卷积核进行卷积操作,从而提取出图像中的特征。可以通过不断调整卷积核的大小、卷积核的值和卷积操作的步长,可以提取出不同尺度和位置的特征。
卷积计算底层实现并非是水平和垂直方向的循环,其真正的计算过程如下:

2.3 padding&stride
- Padding
通过上面的卷积计算,我们发现最终的特征图比原始图像要小,如果想要保持图像大小不变, 可在原图周围添加padding来实现。更重要的是,边缘填充还更好的保护了图像边缘数据的特征。

- Stride
按照步长为1来移动卷积核,计算特征图如下所示:

如果我们把 Stride 增大为2,也是可以提取特征图的,如下图所示:

stride太小:重复计算较多,计算量大,训练效率降低;
stride太大:会造成信息遗漏,无法有效提炼数据背后的特征;
2.4 多通道卷积
图像在计算机眼中是一个矩阵,通道越多,可以表达的特征就越丰富。

对于多通道图像的卷积计算方法如下:
- 当输入有多个通道(Channel), 例如RGB三通道, 此时要求卷积核需要有相同的通道数。
- 卷积核通道与对应的输入图像通道进行卷积。
- 将每个通道的卷积结果按位相加得到最终的特征图。

实际对图像进行特征提取时, 我们需要使用多个卷积核进行特征提取。这个多个卷积核可以理解为从不同到的视角、不同的角度对图像特征进行提取。

卷积操作不仅可以对原图像使用还可以对卷积后得到的特征图使用:

2.5 特征图大小
输出特征图的大小与以下参数息息相关:
- size: 卷积核/过滤器大小,一般会选择为奇数,比如有 1×1, 3×3, 5×5
- Padding: 零填充的方式
- Stride: 步长
完整的计算公式为:
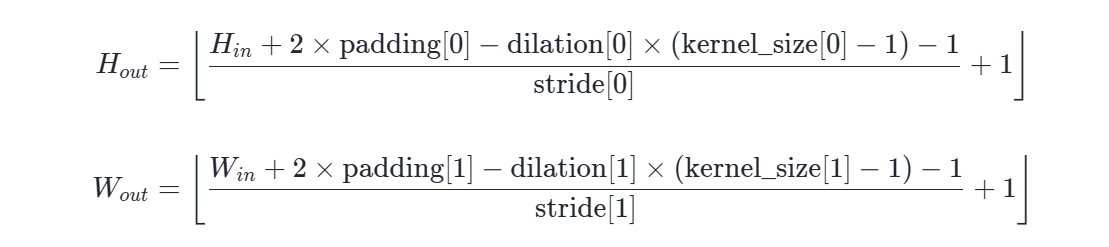
dilation参数含义后面会提到,这里先不作解释
可以将公式简化为:

其中:
- 输入图像大小: W x W
- 卷积核大小: F x F
- Stride: S
- Padding: P
- 输出图像大小: N x N
以下图为例:
- 图像大小: 5 x 5
- 卷积核大小: 3 x 3
- Stride: 1
- Padding: 1
- (5 - 3 + 2) / 1 + 1 = 5, 即得到的特征图大小为: 5 x 5

2.6 api
官方文档
示例:
from matplotlib import pyplot as plt
import os
import torch
import torch.nn as nncurrent_path = os.path.dirname(__file__)
img_path = os.path.join(current_path, "data", "彩色.png")
# 转换为相对路径
img_path = os.path.relpath(img_path)# 使用plt读取图片
img = plt.imread(img_path)
print(img.shape)
# 转换为张量:HWC ---> CHW ---> NCHW 链式调用
img = torch.tensor(img).permute(2, 0, 1).unsqueeze(0)
conv = nn.Conv2d(in_channels=4, # 输入通道out_channels=16, # 输出特征,等于输出的通道数kernel_size=3, # 卷积核大小,影响宽高stride=1, # 步长,影响宽高padding=0, # 填充bias=True
)
# 使用卷积核对图像进行卷积操作
out = conv(img)
print(out.shape)
# 输出128个特征图
conv2 = nn.Conv2d(in_channels=32, # 输入通道out_channels=128, # 输出通道kernel_size=(5, 5), # 卷积核大小stride=1, # 步长padding=0, # 填充bias=True)
out = conv2(out)
# 把图像显示出来
print(out.shape)
plt.imshow(out[0][10].detach().numpy(), cmap='gray')
plt.show()
三、池化层
3.1 概述
池化层 (Pooling) 降低空间维度, 缩减模型大小,提高计算速度. 即: 主要对卷积层学习到的特征图进行下采样(SubSampling)处理。
池化层主要有两种:
-
最大池化 max pooling
最大池化是从每个局部区域中选择最大值作为池化后的值,这样可以保留局部区域中最显著的特征。最大池化在提取图像中的纹理、形状等方面具有很好的效果。
-
平均池化 avgPooling
平均池化是将局部区域中的值取平均作为池化后的值,这样可以得到整体特征的平均值。平均池化在提取图像中的整体特征、减少噪声等方面具有较好的效果。
3.2 池化层计算
计算方式如下:

池化计算也有stride和padding参数,原理与卷积核的计算相同。
3.3 多通道池化
在处理多通道输入数据时,池化层对每个输入通道分别池化,而不是像卷积层那样将各个通道的输入相加。这意味着池化层的输出和输入的通道数是相等。

3.4 池化层的作用
池化操作的优势有:
- 通过降低特征图的尺寸,池化层能够减少计算量,从而提升模型的运行效率。
- 池化操作可以带来特征的平移、旋转等不变性,这有助于提高模型对输入数据的鲁棒性。
- 池化层通常是非线性操作,例如最大值池化,这样可以增强网络的表达能力,进一步提升模型的性能。
但是池化也有缺点:
- 池化操作会丢失一些信息,这是它最大的缺点;
3.5 API
官方文档
示例:
input_map=torch.randn(1, 1, 7, 7)
print(input_map)
maxpool=nn.MaxPool2d(kernel_size=3, stride=1, padding=0,return_indices=True
)
out,index=maxpool(input_map)
print(out,index)
meanpool=nn.AvgPool2d(kernel_size=3, stride=1, padding=0,
)
out=meanpool(input_map)
print(out)
总结
本文简要介绍了CNN的基本概念,以及其对比全连接神经网络的优势。以及卷积和池化的基本概念。