移动机器人底盘在高校科研中的AI智能教育应用
在 AI 智能教育蓬勃发展的当下,应用机器人底盘的二次开发能力成为推动教育创新与科研突破的关键。普蓝机器人的移动机器人底盘,凭借卓越的性能和强大的可扩展性,成为 ROS 教育、AI 教育、机器视觉及大模型应用领域二次开发的理想工具,广泛适配多种场景,为大学、科研院所等机构提供了无限的创新可能。
移动机器人底盘在二次开发方面展现出诸多突出优势,为 AI 智能教育创新保驾护航。
其配备的高性能机器人控制器,如同机器人底盘的 “大脑”,为二次开发提供了强大的算力支持。无论是复杂的 AI 算法部署,还是精密的机器视觉数据处理,都能够让科研人员和学生在开发过程中无需担忧算力不足问题。

一、普蓝机器人的开发性二次开发能力创新应用AI智能教育科研
AI智能教育:
1、ROS/机器人开发实训: 构建导航栈(MoveBase)、实现建图(Gmapping, Cartographer)与定位(AMCL)、开发多机协作系统。
2、AI算法实战平台: 部署与优化YOLO等目标检测模型、实践深度学习视觉伺服控制、验证强化学习(RL)决策算法、探索大模型(LLM/VLM)驱动的机器人自主任务执行。
3、机器视觉综合应用: 实现物体识别与抓取、二维码/AR标签追踪、动态环境避障、三维场景重建。
支持 SDK 以及 ROS 开发与仿真,是机器人底盘在二次开发上的一大亮点。SDK 为开发者提供了丰富的接口和工具,使他们能够根据自身需求快速搭建开发环境,实现个性化功能开发。而 ROS 开发与仿真环境,则让开发者可以在虚拟场景中对开发的程序进行测试和优化,大大降低了实际调试的成本和风险,提高了开发效率。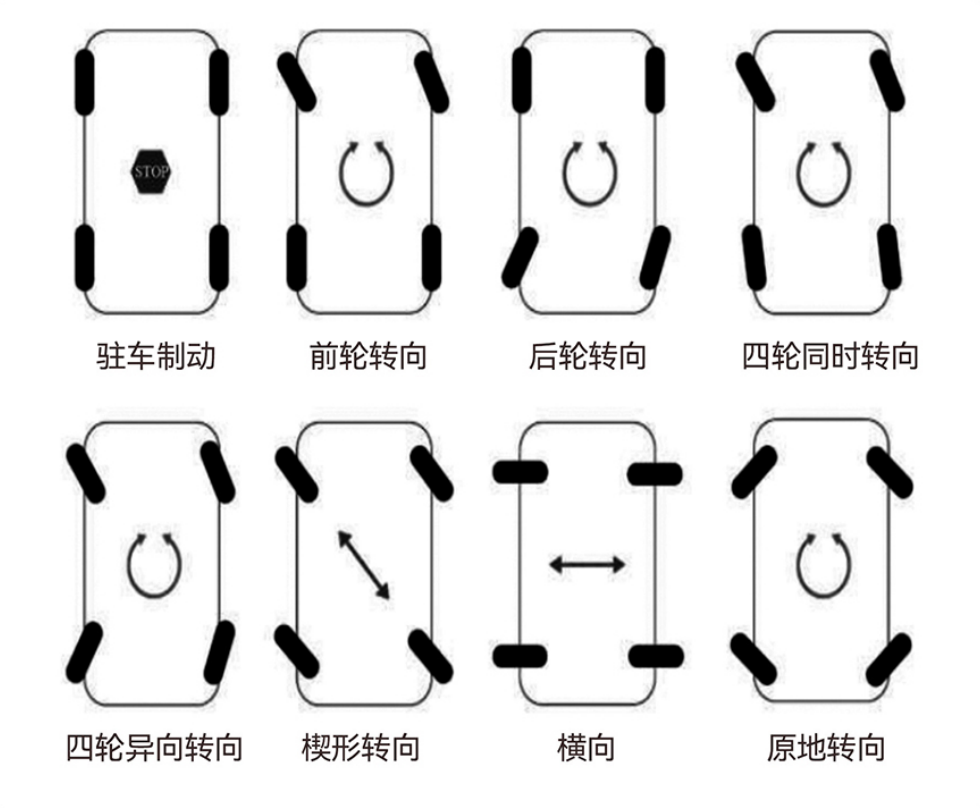
四轮独立驱动和四轮独立悬架的设计,不仅保证了底盘在各种地形下的稳定运行,更为二次开发提供了灵活的运动控制基础。开发者可以通过编程,实现底盘的各种复杂运动轨迹,满足不同教育和科研场景的需求。
4x400W 大扭矩伺服电机驱动,赋予了底盘强劲的动力。在二次开发中,即使搭载了多种实验设备,底盘依然能够保持良好的运动性能,为各类功能的实现提供可靠的动力保障。
30Ah 大容量磷酸铁锂电池,确保了底盘拥有较长的续航时间。这使得在二次开发后的长时间实验、教学演示以及户外场景应用中,无需频繁充电,提高了工作效率。
100kg 的有效负载能力,让底盘可以轻松搭载各种传感器、机械臂等外部设备。在 AI 教育和机器视觉研究中,开发者可以根据具体需求搭载不同的设备,进行多样化的实验和项目开发,拓展了底盘的应用范围。
二、机器人底盘的多场景应用与二次开发案例
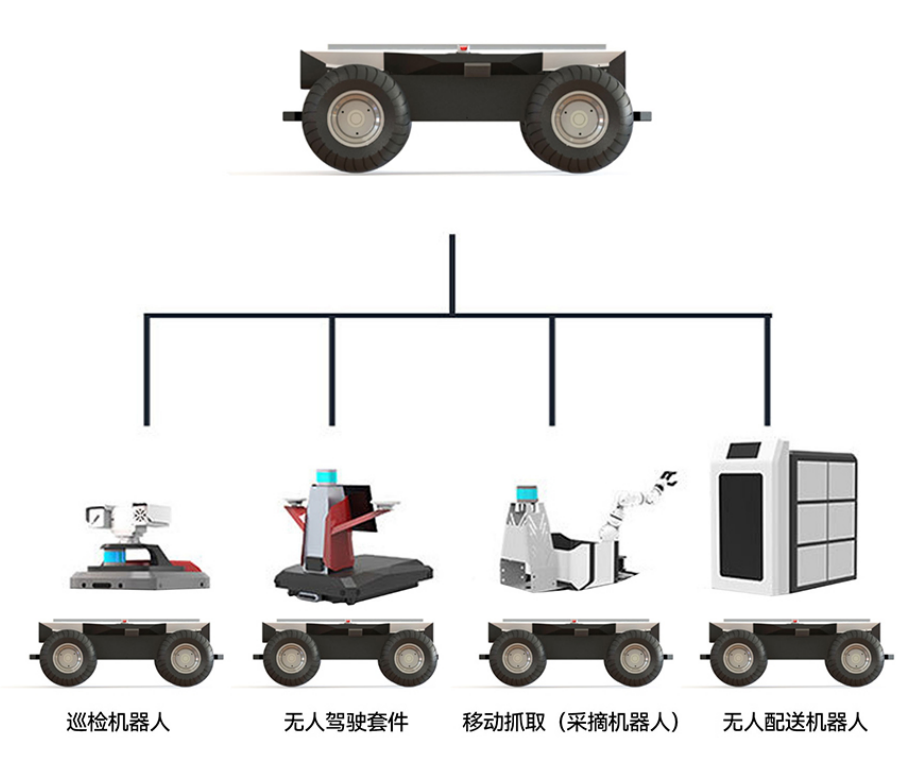
移动机器人底盘经过二次开发后,可在多个场景中大显身手,充分展现其在 AI 智能教育创新中的价值。
1、在教育科学领域,经过二次开发的机器人底盘成为了生动的教学工具。教师可以基于此开发出各种教学项目,让学生通过实际操作,深入理解 ROS、AI 等相关知识。例如,学生可以利用底盘进行自主导航算法的开发与测试,在实践中掌握 AI 技术在机器人领域的应用。
2、科学研究方面,机器人底盘更是科研人员的得力助手。在机器人学、人工智能等前沿领域的研究中,科研人员通过二次开发,将底盘打造成符合特定研究需求的实验平台。无论是机器视觉在目标识别与追踪方面的研究,还是大模型在机器人决策系统中的应用探索,都能借助该底盘顺利开展。
3、在工程勘察场景,二次开发后的底盘展现出强大的适应能力。开发者可以为其搭载专业的勘察设备和传感器,结合机器视觉技术,实现对复杂地形和环境的精准勘察。四轮独立驱动和大扭矩电机的优势在此充分发挥,确保底盘能够在崎岖的勘察现场稳定运行。
4、能源巡检工作中,经过二次开发的底盘能够自主完成巡检任务。通过搭载相关的检测设备和 AI 算法,底盘可以对能源设施进行实时监测,及时发现异常情况并报警。大容量锂电池保证了其在巡检过程中的长时间工作,提高了巡检的效率和安全性。
5、农业采摘领域,借助二次开发,底盘可以与机械臂、机器视觉系统完美结合。通过 AI 算法的控制,实现对果蔬的精准识别和采摘,大大提高了农业生产的自动化水平。
6、仓储配送场景下,二次开发后的底盘能够实现货物的自主搬运和配送。利用 ROS 系统的路径规划功能和 AI 技术的调度算法,优化配送路线,提高仓储配送的效率。
智能移动机器人底盘的通用性和二次开发在不同应用场景下都发挥着重要作用,机器人底盘开放CAN协议,套件开源,为开发者快速部署自动驾驶系统和应用端开发,可快速落地方案。