斯坦福大学联合项目 | ReKep 方法论文解读:机器人操作中关系关键点约束的时空推理
研究背景
传统机器人操作任务中,让机器人完成各种操作任务,通常需要明确它和周围环境的互动规则,缺乏扩展性,难以通过现有求解器实时生成动作。
为了解决这些问题,研究团队提出了“关系关键点约束(ReKep)” 方法。用Franka机械臂实验验证其有效性,为机器人灵活操作提供新思路,推动技术进步。
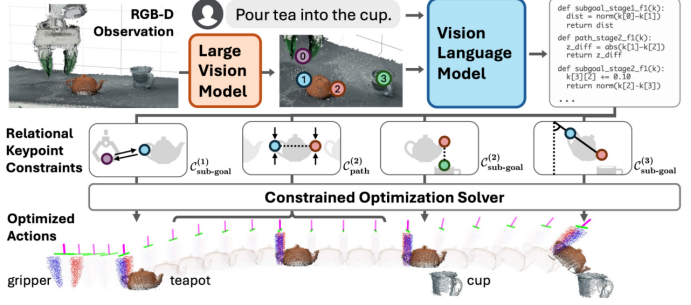
ReKep概述:先用DINOv2从摄像头拍摄的图像里,找出场景中重要的关键点(比如物体的关键部位);再把带这些关键点的图像和任务指令(比如 “倒茶”)传给GPT-4o,让它生成一系列Python程序形式的约束规则,规定不同步骤中关键点该有的位置关系;最后用优化工具根据这些规则,算出机器人末端该怎么动。整个过程不用额外训练,也不用针对具体任务准备数据。
研究中的核心方法
将操作任务表示为基于 3D 关键点的 Python 函数约束,通过大型视觉模型和视觉 - 语言模型自动生成约束,再利用分层优化程序实时求解机器人末端执行器位姿,实现多场景操作任务。
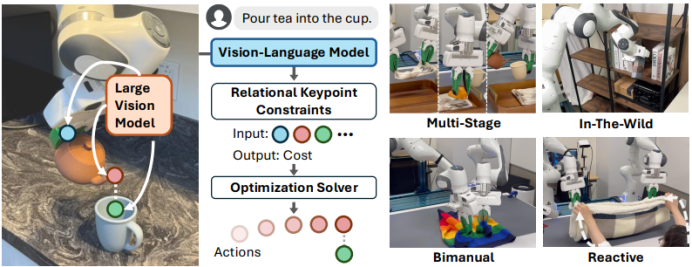
图解:把机器人要做的事,转化成一系列关于“关键点”(比如茶壶把手、杯口这些重要位置)的规则,再让模型自动生成这些规则,最后快速算出机器人的动作。这样一来,机器人不用专门学某个任务,也能在各种场景下灵活干活,比如在厨房倒茶、和人一起折毯子,甚至被打扰了也能调整动作。
实验涉及的硬件设备与环境
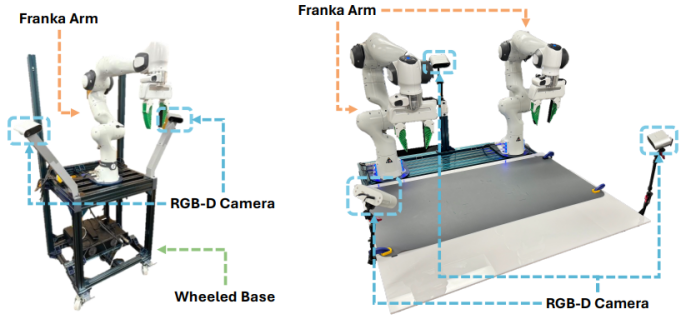
实验基于两种硬件平台,核心设备如下:
机械臂
-
单臂平台:1个Franka机械臂,搭载于Vention框架轮式底座(无自主移动能力,用于扩展作业范围);
-
固定式双臂平台:2个Franka机械臂,安装于桌面工作区前方,支持双臂协作。
传感器
-
单臂平台:2个Orbbec Femto Bolt RGB-D相机,安装于机器人两侧,面向工作区中心,以20Hz频率采集RGB图像和点云;
-
固定式双臂平台:3个Orbbec Femto Bolt RGB-D相机,分别安装于左侧、右侧和后方,同样以20Hz频率采集数据。
控制与计算
-
采用位置控制(20Hz),通过 PyBullet 的 IK 求解器计算关节位置,结合 Deoxys 的关节阻抗控制器执行动作;
-
优化求解依赖 SciPy 库,使用 Dual Annealing(全局优化)和 SLSQP(局部优化)算法。
实验设计与验证
实验围绕三大研究问题展开,覆盖多场景任务与性能评估:
任务设计
-
单臂任务:倒茶(多阶段 + 抗干扰)、回收易拉罐、整理书籍、胶带封箱(协作 + 抗干扰);
-
双臂任务:折叠衣物、打包鞋子、协作折叠(与人类配合 + 抗干扰);
-
泛化测试:针对 8 类衣物(毛衣、衬衫等)的折叠策略泛化性验证。
AI科研领域最强“助手”
验证方式
-
每个任务 10 次试验,随机化物体初始位姿;
-
抗干扰测试中,由人工在执行过程中改变物体位姿;
-
折叠任务中,通过 GPT-4o 评估策略可行性,再测试实际执行效果。
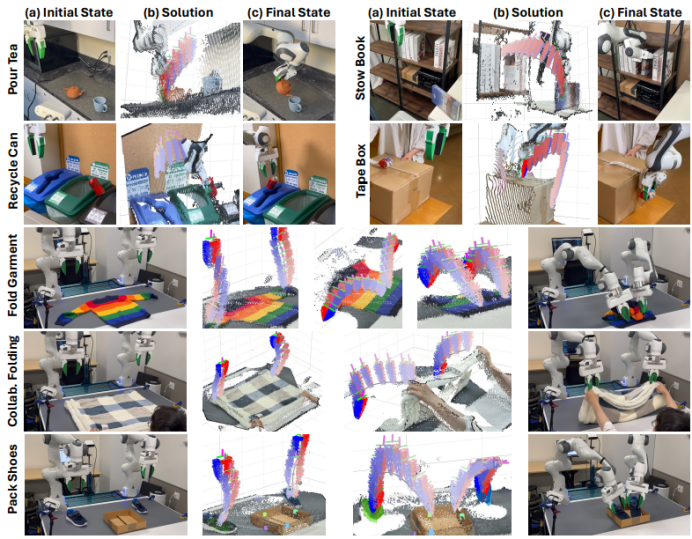
设计了七个任务来验证我们系统的不同方面,包括结合常识知识的野外规范、具有时空依赖性的多阶段任务、具备几何感知的双手协调,以及在与人类协作和受到干扰时的反应能力。
对比与评估指标
-
对比基线:VoxPoser(现有视觉 - 语言驱动方法);
-
自研变体:“Auto”(全自动生成 ReKep)、“Annotated”(人工标注 ReKep);
-
指标:任务成功率、抗干扰能力(外部扰动下的成功率)、策略可行性(“Strategy Success”)与执行成功率(“Execution Success”)。
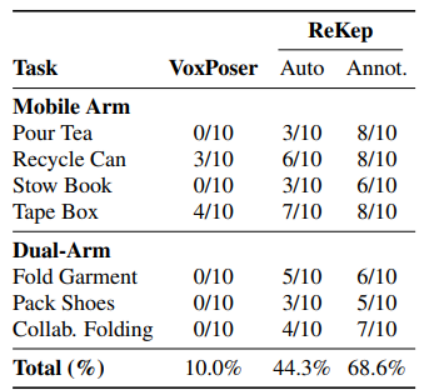
表1:轮式单臂和固定双臂平台的成功率。
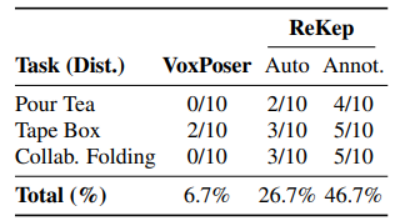
表2:两个机器人平台在外部干扰下的成功率。
研究关键成果与突破
通用性与扩展性
-
支持多场景操作:无需任务特定数据,即可完成多阶段、野外环境、双臂协作、抗干扰任务(如倒茶成功率:Auto为3/10,Annotated为8/10,远超VoxPoser的 0/10)。
-
泛化能力强:在8类衣物折叠任务中,执行成功率达73.8%,策略成功率达52.5%,可生成符合人类直觉的折叠策略(如同时折叠两袖)。
自动化与实时性
全自动约束生成:通过LVM和VLM实现从自然语言到约束函数的转化,无需人工标注;
实时优化:分层求解器支持约10Hz的闭环控制,可动态响应环境变化(如物体被移动时回溯重规划)。
技术突破
首次将视觉 - 语言模型与数值优化结合,实现6-12自由度机器人动作的精准控制;
提出关键点关系约束,规避了传统刚体变换表示的局限性(如依赖物体模型、无法处理可变形物体)。
结语
ReKep方法通过关系关键点约束的时空推理,为机器人操作提供了一种通用、自动化、实时的解决方案,突破了传统方法对任务特定数据和人工标注的依赖。基于 Franka机械臂的实验验证表明,该方法可有效应对多场景操作挑战,为通用机器人技术的发展提供了新范式。
未来,随着视觉-语言模型的迭代,ReKep在长周期任务、复杂关节物体操作等场景的鲁棒性有望进一步提升,推动机器人在家庭、工业等领域的实用化进程。