nexus-集成prometheus监控指标
一. 简介:
关于nexus的简介和部署,这里就不细说了,网上资料很多。这里只讲讲如何基于prometheus做nexus的监控。
二. 实现方法:
nexus 通过特定接口向 Prometheus 暴露其监控指标,可用于了解其运行状态、资源使用情况等。nexus自带metrics指标接口,无需额外安装部署工具, 对应路径: /service/metrics/prometheus 。要使用这些指标,需要通过 Prometheus 配置为从 Nexus 存储库中抓取数据。 需要注意一下,访问其指标接口通常要授予 nx-metrics-all 权限,并为 Prometheus 配置对应 basic_auth 验证信息等才能顺利采集数据。
指标类型主要分为 Component、Jetty、JVM 三类:
1. Component: 以 org_sonatype_nexus_ 为前缀,反映 Nexus 各类核心组件的运行状况,其中关于文件存储组件 FileBlobStore 的指标较常用,能够辅助分析存储使用量、读写效率及潜在的存储故障等情况。
2. Jetty: 以 org_eclipse_jetty_ 为前缀,因 Nexus 采用 Jetty 作为 Web 容器,其可呈现 Nexus 的流量及请求响应状况。像是连接数指标,能显示当前活跃的连接情况,帮助判断是否存在连接资源不足或连接泄漏。
3. JVM: 以 jvm_ 为前缀,记录 Nexus 应用进程对应的 JVM 运行时数据,含堆内存、非堆内存的使用量、分配量,垃圾回收(GC)的执行次数、持续时长等。
三. 配置:
配置抓取:
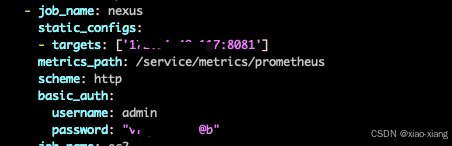
保存配置后重启监控服务。
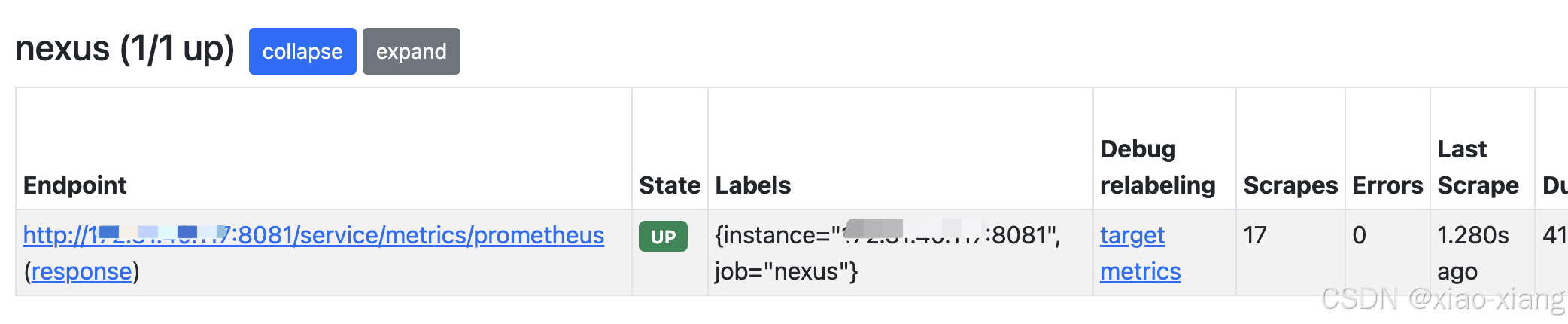
验证:
四. 绘制grafana看板:
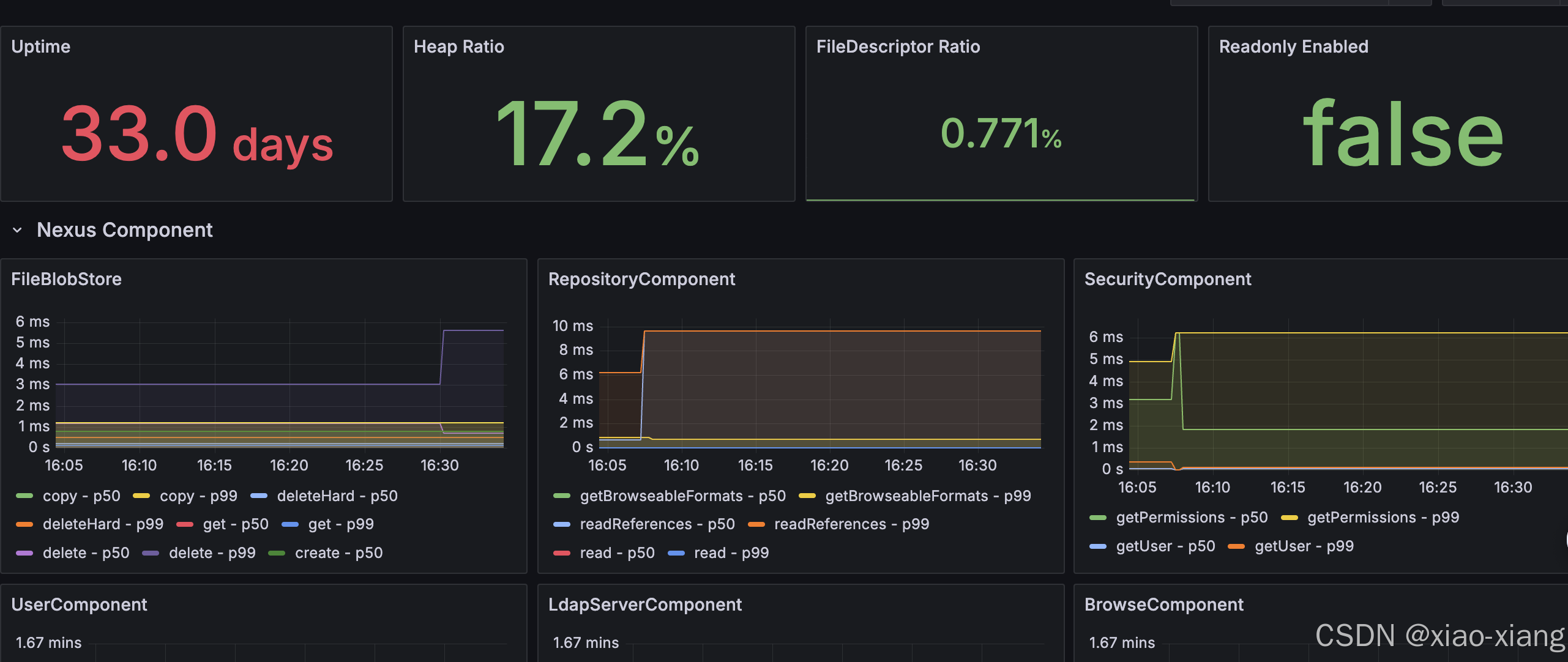
也可参考网上导入开源配置模版。
---------------------------------------------------------------------------------------
深耕运维行业多年,擅长运维体系建设,方案落地。欢迎交流!
V: ywjw996
《 运维经纬 》