如何将 AGV 叉车成功集成到仓库自动化系统中?
随着仓储物流对效率、准确率与成本控制的要求日益提高,AGV(自动导引车)作为自动化物流的重要组成部分,正逐步走入各类企业的核心生产与配送流程。然而,AGV 的成功部署不仅取决于技术本身,还取决于它们与现有系统的集成程度。
本文将以AiTEN海豚之星旗下的机器人产品 —— AiTEN 智能无人叉车为例,为您系统讲解AGV如何高效集成进仓库自动化体系。

什么是AGV叉车?为何要将其接入仓储系统?
AGV(Automated Guided Vehicle)是通过导航系统实现自主运行的搬运设备,主要执行托盘转运、上下货、线边送料等任务。不同于传统人工叉车,AGV可实现无人驾驶、高精度重复作业、远程调度与系统集成。
AiTEN海豚之星作为专业的智能搬运机器人制造商,其代表产品AiTEN APx广泛适配制造型工厂、仓储中心等场景,是实现“智慧仓储”的理想解决方案之一。

AGV叉车集成流程详解
第一步:评估场地与作业需求
在将 AGV 引入您的工作流程之前,请先评估您当前的基础设施:
1.仓库管理系统 (WMS): 评估您的WMS如何处理库存、订单管理和实时跟踪。
2.物料搬运设备 (MHE): 识别并注意与 AGV 交互的其他设备,如传送带、升降机和分拣机。
3.IT 系统: 评估您当前的 IT 系统,包括网络架构、数据存储和通信协议。
AGV部署前需充分了解自身作业流程:
1.日常物料搬运的起点与终点?
2.托盘类型与尺寸?
3.是否涉及货架堆高或自动化设备对接?
AiTEN AR 堆垛车支持2000kg以内托盘搬运,可实现6米以内堆垛作业,适用于高货架与高频率搬运场景。
第二步:仓库地图构建与路线规划
通过多激光SLAM导航系统,AiTEN AGV可快速完成现场建图并实现厘米级精准定位。部署前需规划:
1.主干道/分叉路径
2.上下货点/缓存点位置
3.充电桩位置与返回路径
AiTEN海豚之星团队可提供现场地图模拟演示与动态路线测试,确保系统上线前路径合理、避障无误。
第三步:系统对接与数据集成
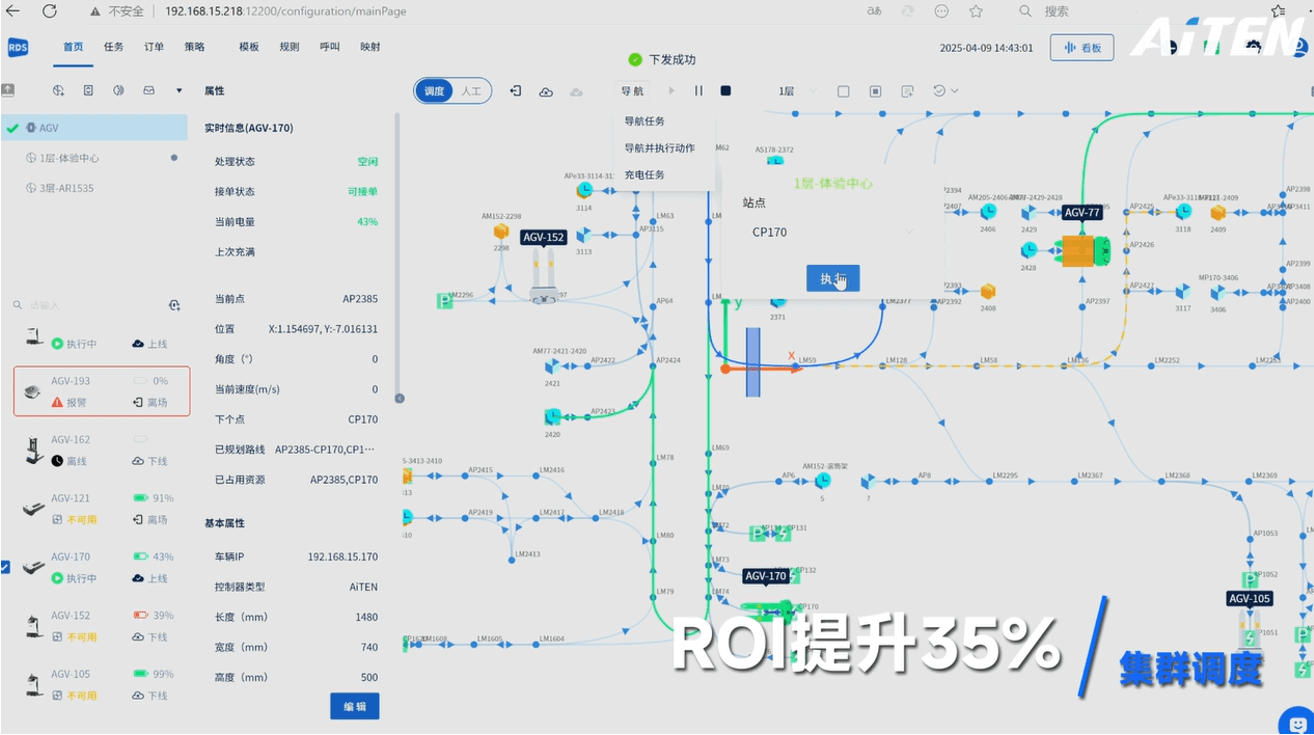
AGV不是孤立运作的,它应与现有系统联动。AiTEN调度平台可与:
1.仓库管理系统(WMS)
2.生产执行系统(MES)
3.企业资源计划系统(ERP)
进行无缝对接,实现任务指令同步、实时反馈、协同控制。
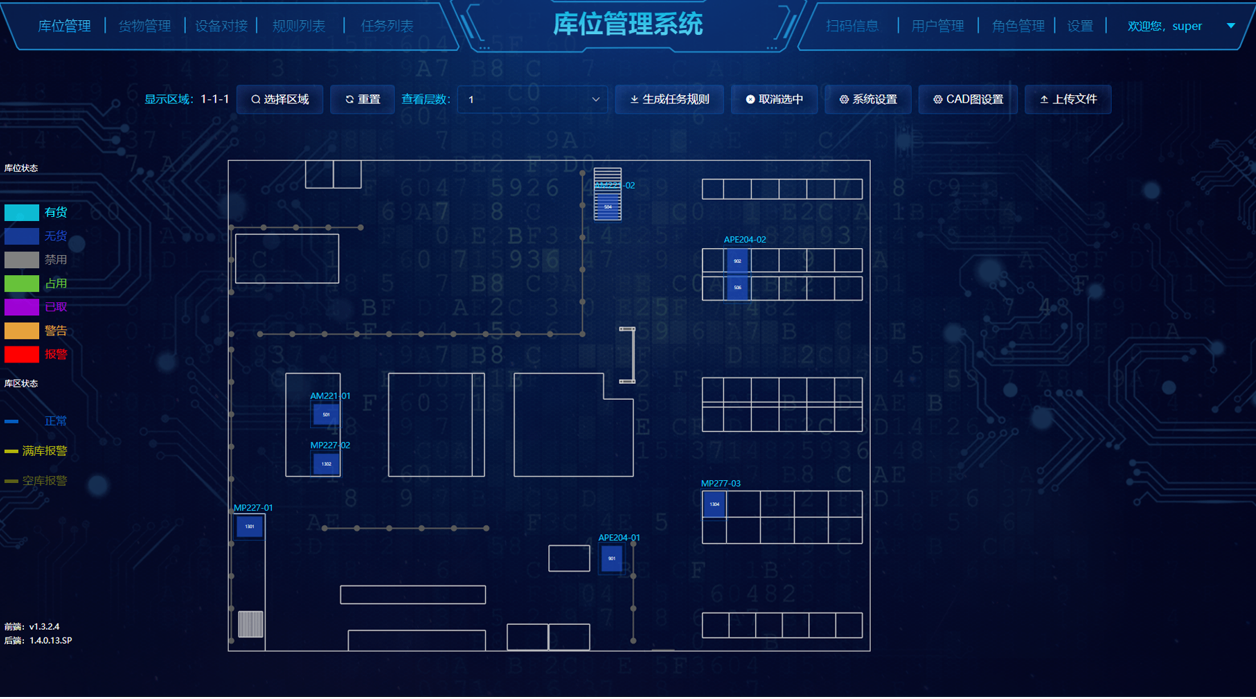
与您的 WMS 的顺利集成对于实时数据同步和高效操作至关重要:
1.实时数据交换: 确保库存水平、订单状态、AGV位置相关数据实时同步。
2.工作流自动化: 配置 WMS 以根据 AGV 数据自动执行任务,例如路由或更新库存水平。
第四步:小范围试运行验证
在正式部署前,建议在单一区域进行试运行:
1.验证转运稳定性与作业效率
2.评估避障灵敏度与对位精度
3.优化调度策略与人机交互流程
AiTEN海豚之星可为试运行提供远程监控、数据分析与技术调优支持。规划严格的测试阶段,以确保 AGV 在您的环境中按预期运行。
第五步:员工培训与现场协同
虽然AGV可实现无人化操作,但人员的认知与配合仍然关键。AiTEN海豚之星提供完整的培训课程,包括:
1.AGV操作:提供有关如何操作和排除 AGV 故障的全面培训。
2.系统交互:培训员工了解 AGV 如何与您的 WMS 和其他系统交互,包括如何应对系统警报或异常。
3.变更管理: 让您的团队为因引入 AGV 而导致的工作流程和流程变化做好准备。
在整个部署过程中,我们尽可能多地让楼层工作人员和高级管理人员参与进来,鼓励他们提出问题,并安排多次培训课程,以确保所有工作人员都接受过充分的培训并熟悉机器人和系统。
机器人投入生产并上线后,我们会将其移交给客户成功经理,他们会定期与现场人员进行检查会议,审查机器人性能指标并解决任何未解决的问题。
总结
将 AGV 与现有系统集成可以显著提升运营效率和准确性,但这需要精心规划和执行。
将AGV系统集成进仓库,不只是替代人力,而是建设一套高效、协同、可持续的智能物流基础设施。
以AiTEN AR系列为代表的无人叉车,兼顾可靠性、安全性与可扩展性,是实现数智化升级的优选方案。采用正确的方法,您的 AGV 将成为物流运营中的宝贵资产,将生产力和效率提升到新的高度。