面向远程智能终端的超低延迟RTSP|RTMP视频SDK架构与实践指南
引言:遥操作时代,视觉链路已成“主控神经元”
从工业巡检到应急救援,从城市安防到边境监控,远程操控正成为智能终端与人机协同的重要落点。而在这些场景中,“视觉”不再只是用来观看的工具,而是贯穿感知、决策与控制全过程的核心通道。
与传统视频监控不同,遥操作系统对视频链路提出了更加严苛的要求:不仅要看得清,更要看得快、看得稳、看得准。系统能否第一时间看到目标、精准判断位置、及时响应操控命令,直接关系到业务成功率、安全性乃至成本控制。
特别是在以下典型场景中:
-
📡 无人机进行低空实时巡检,需毫秒级画面回传保障飞控协同;
-
🤖 工业机器人在危险环境作业,需要低延迟视觉反馈以避免误操;
-
🛡️ 边境布防与异动识别系统,要求画面与控制链路高度同步。
在这些应用中,视频链路实质上承担起了远程“主控神经”的角色,既是操控感知的入口,也是安全策略的前提。
那么,在众多播放器SDK中,谁才真正具备“为遥操作而设计”的超低延迟能力与系统级可控性?
一、远程巡检场景的技术挑战
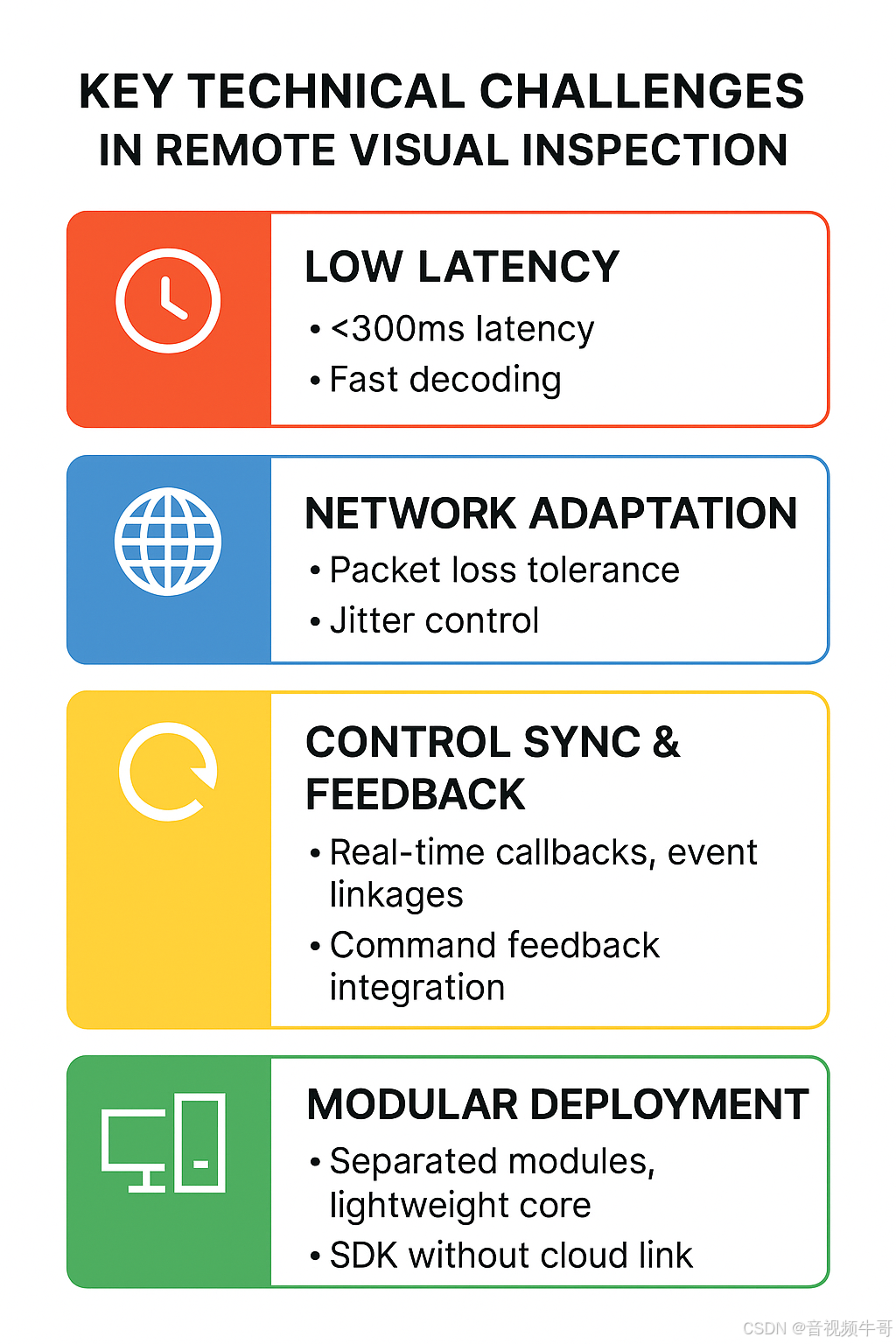
在“人退后、机上前”的远程化趋势中,视觉链路不仅要传递画面,更要承载操控决策的基础。这对播放器 SDK 提出了前所未有的技术挑战,涉及 延迟控制、网络适应性、反馈同步、平台兼容性与模块自由度 等多个维度。
以下是对关键挑战的系统拆解:
🎯 1. 超低延迟传输要求:
必须实现 <300ms 级别的端到端延迟控制,否则操作响应滞后,无法满足人机同步精度。特别是在操控无人机变向、机器人避障时,哪怕 0.5 秒的延迟都可能造成严重偏差。
🔧 技术需求:
-
优化编解码、渲染链路;
-
跳过冗余缓冲机制;
-
支持裸流解码 / 硬件加速等低延迟策略。
🌐 2. 弱网环境兼容性:
远程设备常部署在山区、厂区、边境等网络波动较大的环境,必须稳定适应带宽抖动、丢包、延迟抖动等复杂网络情况。
🔧 技术需求:
-
支持 RTSP over UDP/TCP 自动切换;
-
抖动缓冲可调;
-
关键帧优先渲染机制;
-
实时重连与状态通知。
🔄 3. 反馈同步能力(Control & Playback):
远程巡检场景下,视觉链路与控制链路必须同步协同。播放器不能是“哑终端”,而应具备状态回调、播放控制、事件联动等能力,以便实现调度逻辑与画面联动。
🔧 技术需求:
-
播放器状态实时回调(卡顿、首帧、音视频同步);
-
支持快速切流、静音、快照、角度控制等;
-
可与控制系统集成触发策略联动。
📱 4. 多平台终端适配:
不同场景对接入终端要求不同,如 Android 工控终端、车载嵌入式设备、移动手机、无人机板载系统等。播放器 SDK 必须具备跨平台兼容性与高定制性。
🔧 技术需求:
-
提供 C/C++ / Java / Unity / C# 等多语言接口;
-
支持定制渲染 / UI 层自定义;
-
内核可嵌入嵌入式系统。
🧩 5. 模块化与轻量部署能力:
在边缘设备资源受限、运维成本高的前提下,播放器模块应具备轻量、解耦、独立部署能力,可灵活组合使用。
🔧 技术需求:
-
播放器/推流器/录像模块独立编译;
-
不依赖大型框架或特定云平台;
-
可与现有系统灵活集成。
✅ 技术挑战图示(英文):
二、大牛直播SDK在遥控场景下的优势对比
相比通用型播放器SDK,大牛直播SDK(SmartMediaKit)在面向“遥操作 + 视频控制闭环”的远程场景中表现出更高的适应性、专业性与系统耦合能力。不仅具备超低延迟与模块化特性,更在控制同步、平台兼容性、定制接口等方面为开发者提供了高度可控的能力支撑。
✅ 1. 延迟表现:毫秒级实时画面,支撑同步操控
-
大牛直播SDK:在典型 Android 工控终端中,RTSP 播放延迟实测仅 100~250ms,配合硬解、裸流、跳缓冲等优化策略,满足“边看边控”场景中对于延迟的极致要求。
-
对比类 SDK:大多采用标准缓存机制与预解策略,延迟常在 1000~2000ms 之间,且难以完全关闭内部缓冲,画面响应存在明显滞后。
🚀 工程意义:在无人机避障、机器人变向、调度响应中,500ms 的差值意味着“视觉过时”,直接影响判断安全与执行效率。
✅ 2. 控制反馈能力:不只是“播放器”,更是“调度节点”
-
实时支持播放状态反馈(卡顿、首帧、断流、重连等),可通过接口快速传递给控制逻辑系统;
-
播放器支持快速 URL 切换、实时静音、快照、角度镜像调整等功能,适配动态任务切换与调度需求;
-
可联动 AI 模块、边缘判断逻辑实现视频内容感知后反向指令触发(如 AI 识别告警 → 切换巡检视角)。
🧠 系统价值:播放器不再是信息终点,而成为遥控系统的闭环感知中枢,与控制策略实现高耦合联动。
✅ 3. 模块解耦 + 轻量部署能力
-
大牛直播SDK支持独立集成播放器模块,无需绑定任何推流/云端组件;
-
可按需组合 RTSP/RTMP 播放、推送、转发、录像、快照、国标对接等子模块;
-
适配嵌入式设备、无人机板载系统、边缘盒子等资源受限平台。
🧩 架构优势:支持“按需选型、最小部署”,适合边缘控制器或轻量终端设备快速集成使用。
✅ 4. 多平台全栈适配,接口灵活开放
| 系统平台 | 支持情况 | 接口形式 | 典型用途 |
|---|---|---|---|
| Android | ✅ 支持 | Java API / NDK | 工控终端、工业平板 |
| iOS | ✅ 支持 | Objective-C | 巡检App、手持操控 |
| Windows | ✅ 支持 | C++ DLL / .NET | 调度中心桌面系统 |
| Linux | ✅ 支持 | C/C++ 接口 | 边缘控制器、无人机系统 |
| Unity3D | ✅ 提供 Unity 接口 | C# / Texture 共享 | 可视化遥控场景,XR操作平台 |
🔍 小结对比表:
| 能力维度 | 大牛直播SDK | 传统商业播放器SDK |
|---|---|---|
| 播放延迟 | 100~250ms | 1000~2000ms |
| 状态反馈接口 | ✅ 完整状态回调 | ❌ 仅限错误回调 |
| 模块化能力 | ✅ 支持独立加载 | 🔶 功能耦合强 |
| 多平台兼容 | ✅ Android/iOS/Linux/Win/Unity | 🔶 Android/iOS 主打 |
| AI联动支持 | ✅ 支持 YUV/RGB回调、纹理绑定 | ❌ 无开放接口 |
| 适配弱网 | ✅ 自动 TCP/UDP 切换、缓冲可调 | 🔶 固定策略,波动大 |
三、典型应用组合:构建“边缘终端 + 可控视频”的远程感知闭环
在实际部署中,遥操作系统并不仅仅是“播放视频 + 发送控制命令”这么简单。它是一个完整的闭环链路,涵盖了感知采集、编码传输、解码播放、状态反馈、控制回写、AI辅助决策等多个环节。
而视频链路作为整条链路中的“感知入口 + 状态输出”,决定了整个系统的响应速度、精度与稳定性。
✅ 1. 推荐系统架构图:远程操控的全链路闭环设计
[Camera / Sensor]↓
[Lightweight RTSP/RTMP Encoder] ← Audio / Video input↓
[Network Transmission Layer] ←→ [Cloud / Edge Relay Server]↓
[SmartPlayer SDK (Playback)]↓ ↑
[Visual UI Display] ↑↓ ↑
[Control Feedback Module] ← [AI / Operator]↓
[Command Backchannel] → [Robot / Drone / Device]
✅ 2. 模块协同说明
| 模块 | 作用 | 大牛直播SDK角色 |
|---|---|---|
| 🎥 视频采集端 | 采集并编码音视频,推送到传输链路 | SmartPublisher,支持轻量级RTSP服务/RTMP推送 |
| 🌐 网络传输层 | 网络中转、协议转换、QoS适配 | 支持转发节点部署、UDP/TCP自适应 |
| 🔁 播放器端 | 解码、渲染、同步反馈 | SmartPlayerSDK,提供 YUV / RGB / Texture 回调、控制接口 |
| 🧠 控制中心 | 显示画面、采集用户指令、联动AI | 播放状态与控制按钮联动接口 |
| 🤖 执行终端 | 根据指令做出运动响应 | 支持指令通道回传状态,实现闭环 |
🚀 3. 应用场景实例化
| 场景类型 | 系统部署形态 | 大牛SDK部署位置 |
|---|---|---|
| 低空无人机巡检 | 机载摄像头 → 4G推流 → 指挥平板 | 推流端部署RTSP服务,播放器嵌入指挥端App |
| 化工厂巡逻机器人 | 机器人边缘终端 → 边缘盒子 → 中控调度室 | 播放器部署于Win/Android/Linux/iOS调度平台 |
| 水务管廊巡检 | 摄像头 + 工控盒子 → LTE传输 → AI识别平台 | 推流、播放、快照联动集成 |
| 应急指挥车载调度 | 多路摄像 + 编码 → 同屏调度系统 | 支持多路播放器实例+快切/同步控制 |
| AI辅助识别系统 | 视频流送入AI识别 → 告警触发回显调整 | 播放器状态与AI逻辑深度绑定 |
🔧 4. 模块部署形态简图
┌───────────────────────────┐
│ Device/Camera Side │
│ ┌─────────────────────┐ │
│ │ Lightweight Encoder │──┼────▶ RTSP/RTMP Stream
│ └─────────────────────┘ │
└───────────────────────────┘↓Transmission↓
┌───────────────────────────┐
│ Control Center / UI App │
│ ┌────────────┬─────────┐ │
│ │ Player UI │ Control │ │
│ └────────────┴─────────┘ │
│ ↑ ↓ │
│ Status Feedback │
└───────────────────────────┘
📌 小结
通过大牛直播SDK的播放器与推流模块组合部署,可构建覆盖 “感知 + 控制 + 回传 + 联动” 的完整可控系统链路,具备以下突出特点:
-
💡 毫秒级低延迟反馈,保障控制实时性;
-
🧩 模块自由组合,适应多种终端部署;
-
🎯 控制回调与 AI 模型联动,形成自适应智能系统;
-
⚙️ 跨平台部署,嵌入便捷,适合边缘与中控协同。
四、实战对比:当系统延迟拉开 0.8 秒的差距
在遥操作系统中,“延迟”不只是体验问题,而是决策和执行的生死线。尤其在远程控制无人机、机器人或工业设备时,视频画面的回传延迟将直接影响操作者的判断时间与控制精度。
以真实场景下的大牛直播SDK与主流通用播放器SDK的延迟对比为例,可清晰看出它们在系统级表现上的巨大差距:
Android平台RTSP播放器时延测试
Android平台Unity共享纹理模式RTMP播放延迟测试
🎯 典型任务响应对比场景
✅ 场景一:遥控机器人进入狭窄管道
-
大牛直播SDK:
-
操作者根据回显画面实时判断左右转向;
-
延迟100-250ms区间,转向操作几乎无感;
-
控制动作与画面高度同步,无“延迟拖拽”感;
-
-
通用播放器SDK:
-
回显延迟近 1s,实际画面与当前机器人位置严重错位;
-
操作者容易误判,导致机器人多次碰壁、停滞;
-
🚨 差距结论:画面延迟 800ms 将直接导致操作“超前”或“过后”,在封闭复杂环境中极易发生误控。
✅ 场景二:无人机避障动态巡检
-
大牛直播SDK:
-
飞控端接收实时画面,识别障碍物并及时上升或侧移;
-
延迟控制在 100-250ms 内,飞行连贯流畅,避障反应迅速;
-
-
通用播放器SDK:
-
飞控画面存在明显延迟,判断点位时障碍物位置已偏移;
-
操作频繁修正,降低了飞行效率与安全性;
-
🚁 结论:延迟差距不只是时间问题,更是对任务成功率与操控风险的实质挑战。
🔚 小结:
不是所有的“可播”都是“可控”。
遥操作系统对视频链路的要求,是“快、稳、准”,而不是“能看见就行”。
大牛直播SDK凭借其毫秒级延迟能力与工程级优化细节,在多个实战项目中已验证其在远程巡检、应急处置、低空作业等场景下的可靠性与专业性。
相比之下,通用型播放器SDK更多关注于播放体验与平台适配,对于“实时控制”这类硬性指标,难以满足专业需求。
五、结语:让视频链路为“远程操控”赋能,而不是拖后腿
在所有遥操作系统中,视频链路始终处于系统的第一感知入口与最后的决策反馈出口之间,贯穿从感知、判断到执行的全过程。它既是“眼睛”,更是“神经枢纽”。
而这条链路的稳定性、低延迟性、模块可控性,直接决定了整个系统是“可视”还是“可控”,是“可播”还是“可决”。
✅ 视频不是附件,而是操控核心
遥控系统不再是简单的“操作 + 摄像头”,而是依赖于毫秒级回传、状态感知、联动控制等能力的智能闭环体系。
在这个体系中,播放器不再只是“显示端口”,而是要具备:
-
实时渲染 + 状态回调 + 快速控制能力;
-
可嵌入至 Android/iOS/嵌入式/Unity 等多种平台;
-
与 AI 模块 / 控制模块形成协同反应的“感知神经”。
✅ 技术选型的本质,是对未来系统“可控性”的下注
选择一套播放器SDK,背后其实是对整个系统工程复杂度、长期可维护性、演进路径的选择:
-
📉 如果播放器本身延迟高、不可调、接口封闭,它将成为整条操控链路中最脆弱的一环;
-
🧩 而一套具备模块化、低延迟、平台兼容、控制友好等能力的视频SDK,才真正具备“基础设施”级价值。
在这个意义上,大牛直播SDK提供的,不仅是技术能力,更是构建未来可控、可维护、可拓展遥操作系统的基础积木。
🔍 最后总结关键词
| 关键词 | 意义 |
|---|---|
| 超低延迟 | 毫秒级响应,保障同步操控 |
| 模块解耦 | 推播分离,播放可控,可按需组合 |
| 状态反馈 | 播放器变控制中枢,助力指令回写 |
| 平台适配 | Android / iOS / Win / Linux / Unity 全平台支持 |
| AI协同 | 支持帧级联动,形成视觉智能闭环 |
📌 一句话总结:
真正的遥操作系统,离不开一条“快、稳、控”的视觉神经链路。
而真正的播放器,不止能播,更要能控。
📎 CSDN官方博客:音视频牛哥-CSDN博客