OpenCV学习 day4
一、图像梯度处理
1、图像梯度
把图像想象成连续函数,因为边缘部分的像素值是与旁边像素值有明显区别的,所以对图片局部求极值,就可以得到整幅图像的边缘信息了。不过图像是二维的离散函数,导数就变成了差分,这个差分就成为图像的梯度。
图像梯度表示的是图像中像素强度的变化率(即“变化有多快”),用于检测边缘、轮廓和纹理。它本质是图像的一阶导数,其中包含着两个关键信息:
- 1、梯度大小:变化的强度(边缘的明显程度)。
- 2、梯度方向:变化的方向(边缘的朝向)。
2、垂直边缘提取
垂直边缘的检测依赖于 水平梯度(Gx),即对图像在 x方向(水平) 的变化率进行卷积计算。
核心思想:
- 垂直边缘是图像中 水平方向像素值的突变(如从黑到白的过渡)。
- 通过设计特定的水平梯度卷积核(Gx),可以增强垂直边缘的响应。
API:
cv2.filter2D(src, ddepth, kernel)
filter2D函数是用于对图像进行二维卷积(滤波)操作。它允许自定义卷积核(kernel)来实现各种图像处理效果,如平滑、锐化、边缘检测等
参数:
- src:输入的图像,一般为numpy数组。
- ddepth:输出图像的深度,可以是负值(表示与原图相同)、正值或者其他特定的值(常用-1表示输出与输入具有相同的深度)。
- kernel:卷积核,一个二维数组(通常为奇数大小的方形矩阵),用于计算每个像素周围领域的加权和
数组模拟:
import cv2 as cv
import numpy as np
# 模拟一张图像,灰度图
img=np.array([[100,102,109,110,98,20,19,18,21,22],[109,101,98,108,102,20,21,19,20,21],[109,102,105,108,98,20,22,19,19,18],[109,98,102,108,102,20,23,19,20,22],[109,102,105,108,98,20,22,19,20,18],[100,102,108,110,98,20,19,18,21,22],[109,101,98,108,102,20,22,19,20,21],[109,102,108,108,98,20,22,19,19,18],],dtype=np.float32)
# 定义卷积核,
kernel=np.array([[-1,0,1],[-2,0,2],[-1,0,1]],dtype=np.float32)
# 二维卷积操作
img2=cv.filter2D(img,-1,kernel)
# 打印卷积后的图
print(img2)
3、Sobel算子
水平梯度卷积核(Gx)(用于检测垂直边缘):
Gx=[−101−202−101]G_{x}^{} = \begin{bmatrix}
-1 &0 &1 \\ -2&0 &2 \\ -1& 0 &1
\end{bmatrix}Gx=−1−2−1000121
- 作用:中间列权重更大,增强对噪声的鲁棒性
- 特点:平滑(加权平均) + 差分(边缘检测)
API:
sobel_image = cv2.Sobel(src, ddepth, dx, dy, ksize)
参数:
- src:输入图像,通常应该是一个灰度去向(单通道图像)
- ddepth:代表输出图像的深度,即输出图像的数据类型。常用-1表示输出图像与输入图像的深度相同。
- dx,dy:当组合为dx=1,dy=0时求x方向的一阶导数,在这里,设置为1意味着我们想要计算图像在水平方向(x轴)的梯度。当组合为 dx=0,dy=1时求y方向的一阶导数
- ksize:Sobel算子的大小,可选择3、5、7,默认为3.
OpenCV代码实现
import cv2 as cv#读图,灰度化
img = cv.imread("../../images/shudu.png", cv.IMREAD_GRAYSCALE)
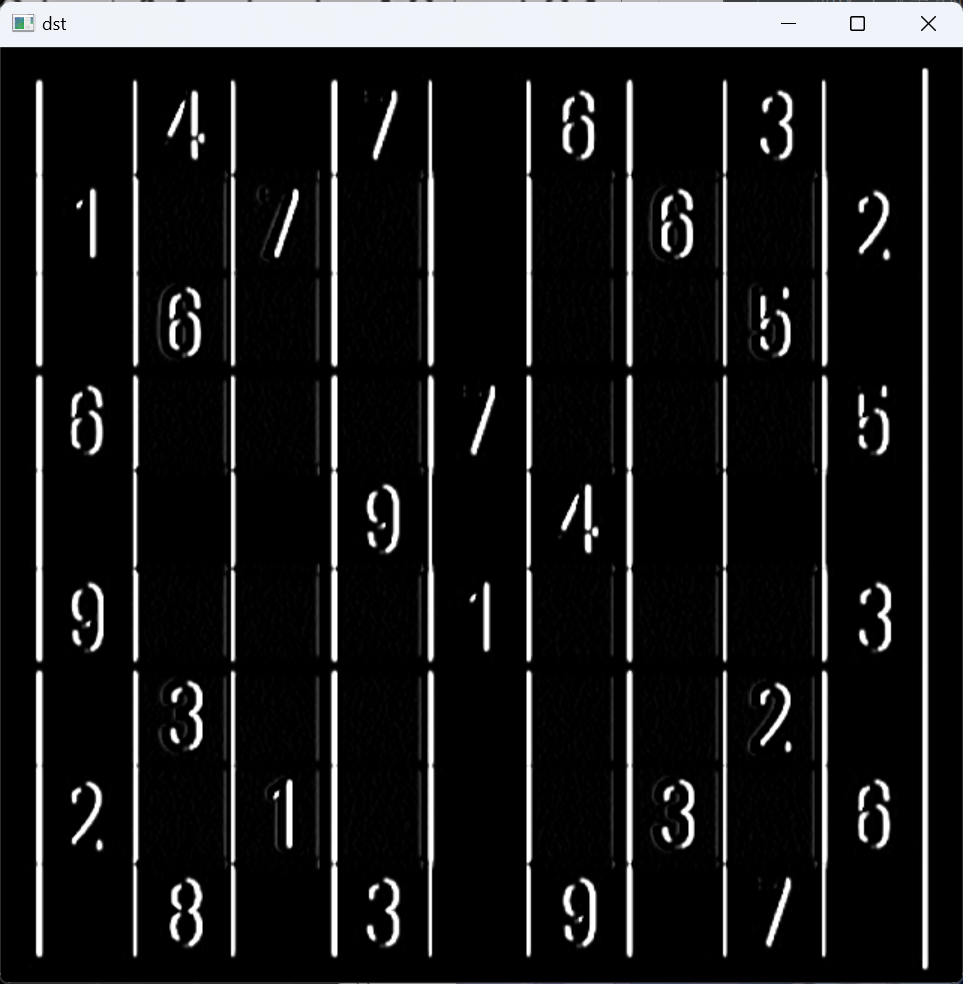
cv.imshow("img", img)#dx=1:水平方向上差分求梯度,提取的是垂直边缘
dst=cv.Sobel(img,-1,1,0,ksize=3)
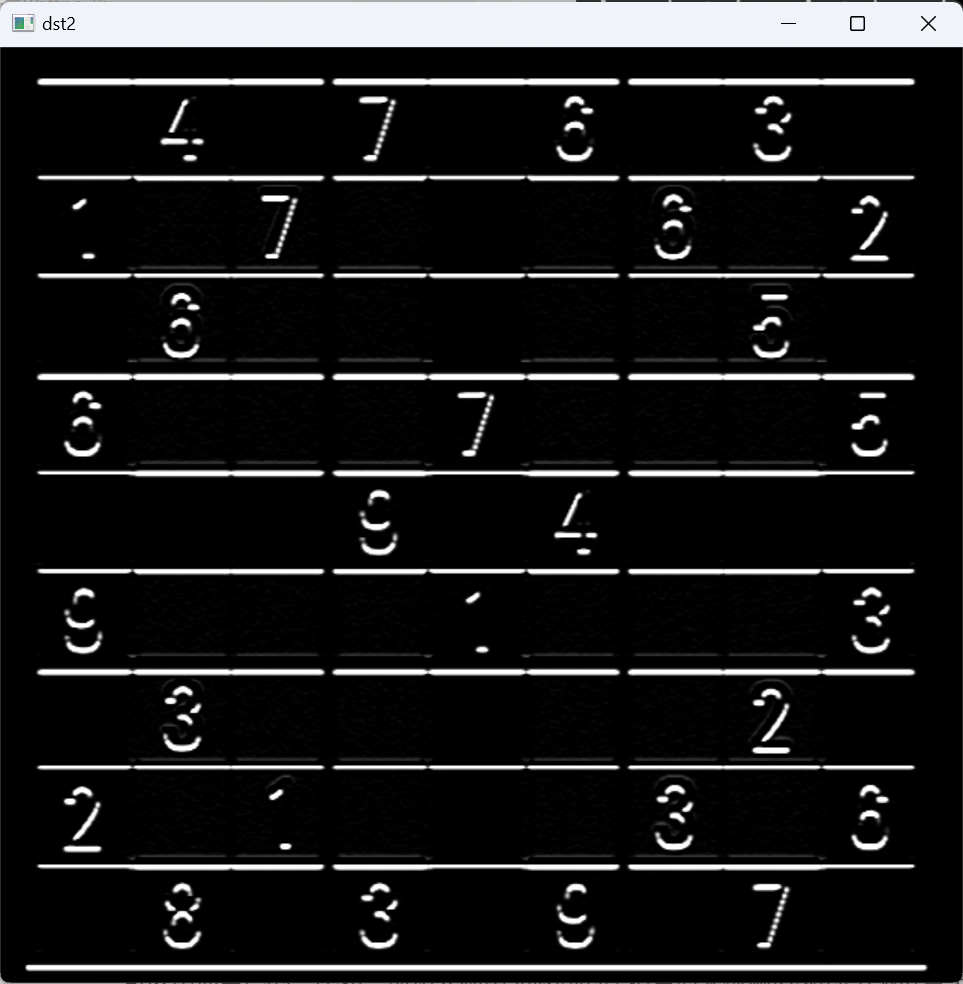
cv.imshow("dst",dst)# dy=1:垂直方向上差分求梯度,提取的是水平边缘
dst2=cv.Sobel(img,-1,0,1,ksize=3)
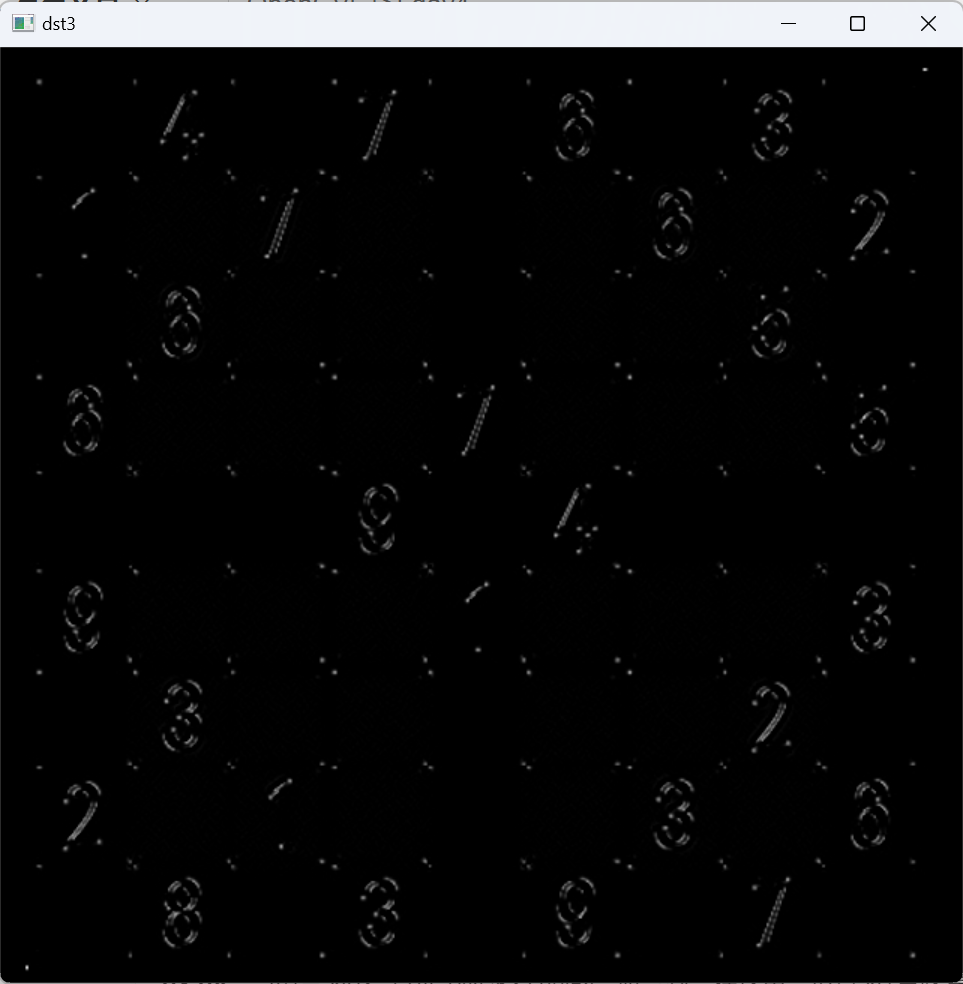
cv.imshow( "dst2",dst2)#dx,dy都等于1,两个方向上差分求梯度,这个算子通常不会得到想要的结果
dst3=cv.Sobel(img,-1,1,1,ksize=3)
cv.imshow("dst3",dst3)cv.waitKey(0)
cv.destroyAllWindows()
处理结果:
原图:
水平方向差分求梯度,提取的是垂直边缘:
垂直方向上差分求梯度,提取的是水平边缘:
两个方向上差分梯度:
4、Laplacian算子
常用的3×3Laplacian卷积核有两种形式:
四领域:
[0101−41010]\begin{bmatrix}
0 &1 &0 \\ 1&-4 &1 \\ 0& 1 &0
\end{bmatrix}0101−41010
八领域
[1111−81111]\begin{bmatrix}
1 &1 &1 \\ 1&-8 &1 \\ 1& 1 &1
\end{bmatrix}1111−81111
八邻域对斜向边缘更敏感,但噪声响应也更强。
Laplacian算子的特点:
二阶微分: 直接检测像素强度的“变化率的变化”,对边缘和角点敏感。
对噪声敏感 会放大高频噪声,通常需先高斯模糊(即 LoG 算子)。
各向同性: 对水平、垂直、斜向边缘的响应相同(旋转不变性)。
OpenCV代码实现
import cv2 as cv#读图
shudu = cv.imread("../../images/shudu.png", cv.IMREAD_GRAYSCALE)
cv.imshow("shudu", shudu)#使用Laplacian算子提取边缘(输出为 CV_64F)
dst = cv.Laplacian(shudu, cv.CV_64F)
cv.imshow("dst", dst)# 取绝对值并转为 CV_8U(0~255)
dst1 = cv.convertScaleAbs(dst)
cv.imshow("dst1", dst1)cv.waitKey(0)
cv.destroyAllWindows()
Laplacian算子是二阶边缘检测的典型代表,一/二阶边缘检测各有优缺点,大家可自行了解。
5、Laplacian 与 Sobel 对比
| 对比项 | Laplacian | Sobel |
|---|---|---|
| 阶数 | 二阶导数 | 一阶导数 |
| 边缘响应 | 过零点(Zero-Crossing) | 极值点 |
| 方向性 | 各向同性(无方向偏好) | 分水平/垂直方向 |
| 噪声敏感度 | 更高(需高斯平滑) | 较低 |
| 适用场景 | 边缘增强、锐化、斑点检测 | 通用边缘检测 |
二、图像边缘检测
图像边缘检测不是一个算子,而是完整的一整套方案。
边缘检测是图像处理中的核心任务,用于识别图像中物体边界或显著变化区域。其核心思想是检测像素强度的突变(比如从黑到白的过度)。
高斯滤波处理:
就是去除噪点!
边缘检测本身属于锐化操作,对噪点比较敏感,所以一般需要进行平滑处理。
1、边缘检测的核心原理
(1) 边缘的数学定义
- 一阶导数极值:边缘对应像素强度函数的一阶导数的极大值点(如Sobel检测)。
- 二阶导数过零点:边缘对应二阶导数的零交叉点(如Laplacian检测)。
(2) 边缘类型
| 类型 | 特点 |
|---|---|
| 阶跃边缘 | 像素值突然变化(如黑白交界) |
| 斜坡边缘 | 像素值渐变(模糊边缘) |
| 屋顶边缘 | 像素值先增后减(细线) |
2、经典边缘检测算法
(1) 一阶微分算子
① Sobel 算子
- 原理:加权差分(平滑噪声 + 增强边缘)。
- 卷积核:
Gx=[−101−202−101]G_{x}^{} = \begin{bmatrix} -1 &0 &1 \\ -2&0 &2 \\ -1& 0 &1 \end{bmatrix}Gx=−1−2−1000121,Gy=[−1−2−1000121]G_{y}^{} = \begin{bmatrix} -1 &-2 &-1 \\ 0&0 &0 \\ 1& 2 &1 \end{bmatrix}Gy=−101−202−101
② Prewitt 算子
- 特点:简单差分,抗噪性弱于Sobel。
- 卷积核:
Gx=[−101−101−101]G_{x}^{} = \begin{bmatrix} -1 &0 &1 \\ -1&0 &1 \\ -1& 0 &1 \end{bmatrix}Gx=−1−1−1000111,Gy=[−1−1−1000111]G_{y}^{} = \begin{bmatrix} -1 &-1 &-1 \\ 0&0 &0 \\ 1& 1 &1 \end{bmatrix}Gy=−101−101−101
③ Roberts 算子
- 特点:检测对角线边缘,对噪声敏感。
- 卷积核:
- Gx=[01−10]G_{x}^{} = \begin{bmatrix} 0 &1 \\ -1&0 \end{bmatrix}Gx=[0−110],Gy=[100−1]G_{y}^{} = \begin{bmatrix} 1 &0 \\ 0&-1 \end{bmatrix}Gy=[100−1]
(2) 二阶微分算子
① Laplacian 算子
- 原理:直接计算二阶导数,突出快速变化区域。
- 卷积核:
[0101−41010]\begin{bmatrix} 0 &1 &0 \\ 1&-4 &1 \\ 0& 1 &0 \end{bmatrix}0101−41010
② LoG(Laplacian of Gaussian)
步骤:先高斯模糊再Laplacian,减少噪声影响。
(3) Canny 边缘检测(最优算法)
流程:
- 1、高斯滤波去噪
- 2、计算梯度幅值和方向(Sobel)
- 3、非极大值抑制(细化边缘)
- 4、双阈值检测(强边缘+弱边缘连接)
优势:抗噪性强,边缘连续且细。
3. 算法对比与选择
| 算法 | 优点 | 缺点 | 适用场景 |
|---|---|---|---|
| Sobel | 计算快,抗噪较好 | 边缘较粗 | 实时检测 |
| Prewitt | 简单 | 噪声敏感 | 高对比度图像 |
| Laplacian | 各向同性 | 噪声敏感 | 锐化、斑点检测 |
| Canny | 边缘细、连续,抗噪强 | 计算复杂 | 高精度边缘检测 |
4、Canny的API和使用
即使读到的是彩色的图也可以进行处理。
返回值edges,边缘检测后的结果
edges = cv2.Canny(image, threshold1, threshold2)
参数:
- image:输入的灰度/二值化图像数据。
- threshold1:低阈值,用于决定可能的边缘点。
- threshold2:高阈值,用于决定强边缘点。
OpenCV代码实现
import cv2 as cv#读图,并且灰度化处理
shudu = cv.imread("../../images/shudu.png",cv.IMREAD_GRAYSCALE)
cv.imshow("shudu",shudu)#Canny边缘检测
edged = cv.Canny(shudu,30,70)#显示效果
cv.imshow("edged",edged)
cv.waitKey(0)
cv.destroyAllWindows()
三、绘制图像轮廓
轮廓是一系列相连的点组成的曲线,代表了物体的基本外形。相对于边缘,轮廓是连续的,边缘不一定连续,如下图所示。轮廓是一个闭合的、封闭的形状。
轮廓的作用:
- 形状分析
- 目标识别
- 图像分割
1、基本流程
步骤概括:
- 1、边缘检测:使用Canny、阈值法等提取边缘。
- 2、 轮廓查找:cv2.findContours() 获取轮廓列表。
- 3、轮廓绘制:cv2.drawContours() 在原图上绘制轮廓。
2、AIP与使用
contours,hierarchy = cv2.findContours(image,mode,method)
参数:
- 返回值:contours:轮廓点坐标;hierarchy:层级关系。
- contours:表示获取到的轮廓点的列表。检测到有多少个轮廓,该列表就有多少子列表,每一个子列表都代表了一个轮廓中的所有点的坐标。
- hierarchy:表示轮廓之间的关系。
- image:表示输入的二值化图像。
- mode:表示轮廓的检索模式。
- method:轮廓的表示方法。
(1)mode参数
轮廓查找方式。返回不同的层级关系。
mode参数共有四个选项分别为:RETR_LIST,RETR_EXTERNAL,RETR_CCOMP,RETR_TREE。
①RETR_EXTERNAL
表示只查找最外层的轮廓。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。
2.3.4.会查找所有轮廓,但会有层级关系。
②RETR_LIST
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,每一个轮廓只有前一条轮廓与后一条轮廓的索引,而没有父轮廓与子轮廓的索引。
③RETR_CCOMP
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,轮廓会按照成对的方式显示。
在 RETR_CCOMP 模式下,轮廓被分为两个层级:
- 层级 0:所有外部轮廓(最外层的边界)。
- 层级 1:所有内部轮廓(孔洞或嵌套的区域)。
④RETR_TREE
表示列出所有的轮廓。并且在hierarchy里的轮廓关系中,轮廓会按照树的方式显示,其中最外层的轮廓作为树根,其子轮廓是一个个的树枝。
(2)method参数
轮廓存储方法。轮廓近似方法。决定如何简化轮廓点的数量。就是找到轮廓后怎么去存储这些点。
method参数有三个选项:CHAIN_APPROX_NONE、CHAIN_APPROX_SIMPLE、CHAIN_APPROX_TC89_L1。
- CHAIN_APPROX_NONE表示将所有的轮廓点都进行存储
- CHAIN_APPROX_SIMPLE表示只存储有用的点,比如直线只存储起点和终点,四边形只存储四个顶点,默认使用这个方法;
常用:对于mode和method这两个参数来说,一般使用RETR_EXTERNAL和CHAIN_APPROX_SIMPLE这两个选项。
(3)使用
OpenCV代码实现
import cv2 as cv
#读图
img = cv.imread("../../images/666.png")
img1 = cv.resize(img,(300,300))#灰度化
gray = cv.cvtColor(img1, cv.COLOR_BGR2GRAY)#二值化
thresh , binary = cv.threshold(gray, 127, 255, cv.THRESH_OTSU + cv.THRESH_BINARY_INV)
print(thresh)
cv.imshow("binary", binary)#查找轮廓
conts,hie = cv.findContours(binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)
print(f"轮廓数量:{len(conts)}")
print(conts)
print("--------------------------------------------------------")
print(hie)#绘制轮廓
img2 = cv.drawContours(img1,conts,-1,(255,0,0),2)
cv.imshow("img2",img2)#显示效果cv.waitKey(0)
cv.destroyAllWindows()
四、凸包特征检测
凸包是计算几何中的经典概念,在图像处理中用于简化轮廓形状、分析物体凸性缺陷(如凹陷区域)或提取拓扑结构。以下是OpenCV中的实现方法和应用场景。
1、凸包的定义
- 数学定义:包含给定点集的最小凸多边形。
- 直观理解:用橡皮筋包围所有点时的形状(无凹陷)。
- 关键特性:
- 凸包上的任意两点连线均在多边形内部。
- 用于区分物体的凸性(如区分手掌张开和握拳)。
2、OpenCV中的凸包计算
(1)获取凸包点
cv2.convexHull(points)
- points:输入参数,图像的轮廓点
(2)绘制凸包
cv2.polylines(image, pts, isClosed, color, thickness=1)
参数:
- image:要绘制线条的目标图像,它应该是一个OpenCV格式的二维图像数组(如numpy数组)。
- pts:一个二维 numpy 数组,每个元素是一维数组,代表一个多边形的一系列顶点坐标。
- isClosed:布尔值,表示是否闭合多边形,如果为 True,会在最后一个顶点和第一个顶点间自动添加一条线段,形成封闭的多边形。
- color:线条颜色,可以是一个三元组或四元组,分别对应BGR或BGRA通道的颜色值,或者是灰度图像的一个整数值。
- thickness(可选):线条宽度,默认值为1。
(3)OpenCV代码实现
import cv2 as cv
#读图
img = cv.imread("../../images/666.png")
img1 = cv.resize(img,(300,300))#灰度化
gray = cv.cvtColor(img1, cv.COLOR_BGR2GRAY)
cv.imshow("gray", gray)#二值化
_, binary = cv.threshold(gray,127,255,cv.THRESH_OTSU + cv.THRESH_BINARY_INV)
print(f"合理阈值{_}")
cv.imshow("binary",binary)#查找轮廓 counts:轮廓点,hie:层级关系
counts , hie = cv.findContours(binary,cv.RETR_EXTERNAL,cv.CHAIN_APPROX_SIMPLE)
print(f"轮廓数量{len(counts)}")
print(counts)
print("------------------------------------------")
print(hie)#绘制轮廓
cv.drawContours(img1,counts,-1,(255,0,0),2)
cv.imshow("img1",img1)#凸包检测,获取凸包点
for count in counts: #for循环遍历所有轮廓点hull = cv.convexHull(count)# 绘制凸包binary1 = cv.polylines(img1, [hull], True, (0, 255, 0), 2)
cv.imshow("binary1",binary1)#显示效果
cv.waitKey(0)
cv.destroyAllWindows()