自动驾驶中的传感器技术14——Camera(5)
1、自驾系统架构对Camera的需求
如下图所示(以Mobileye方案为例)
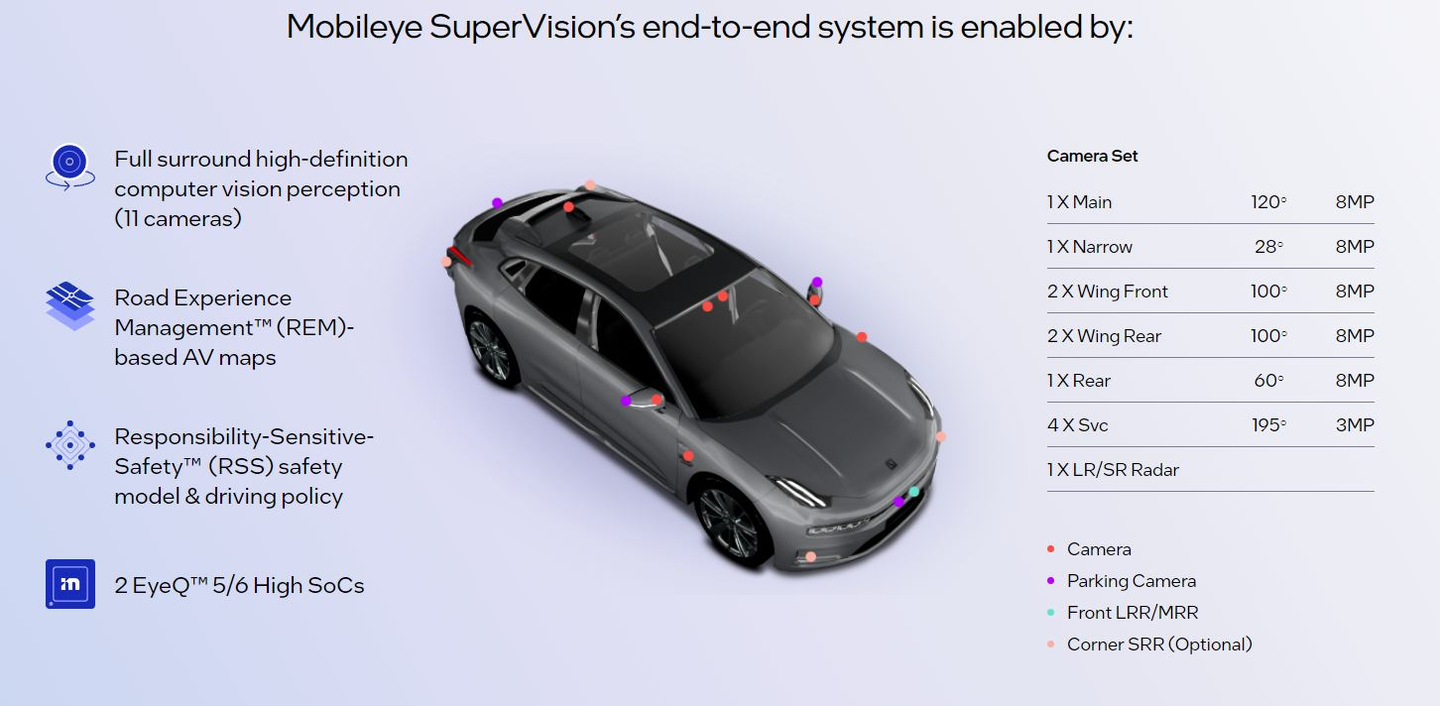
需要进行一下评估
算法端对目标像素需求:以行人为例 Pixels/Range,即在一定距离(100m)远处,识别行人所需要的像素个数;
CIS像素规格确定:8MP、5MP、3MP,是否需要12MP等高像素CIS;
图传数据率需求:Serdes选型
FOV以及Range确定:镜头选型;
以上选型是和自动驾驶整体架构设计需求相关。
2、自驾Camera 架构

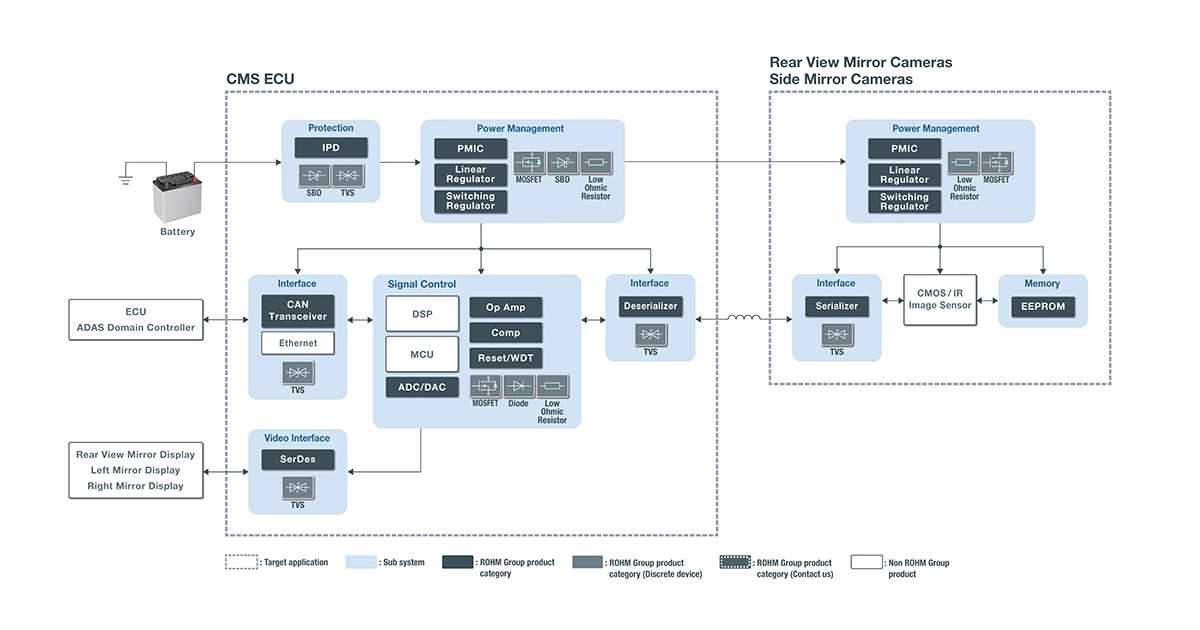
另外环视可能会采用下面的双出方案,无ISP的进CV处理,有ISP的进大屏直接给驾驶者观看。目前主流方案是直接完全一样的数据在Serializer中复制一份,一份进自驾域控制器,一份进座舱域控制器。
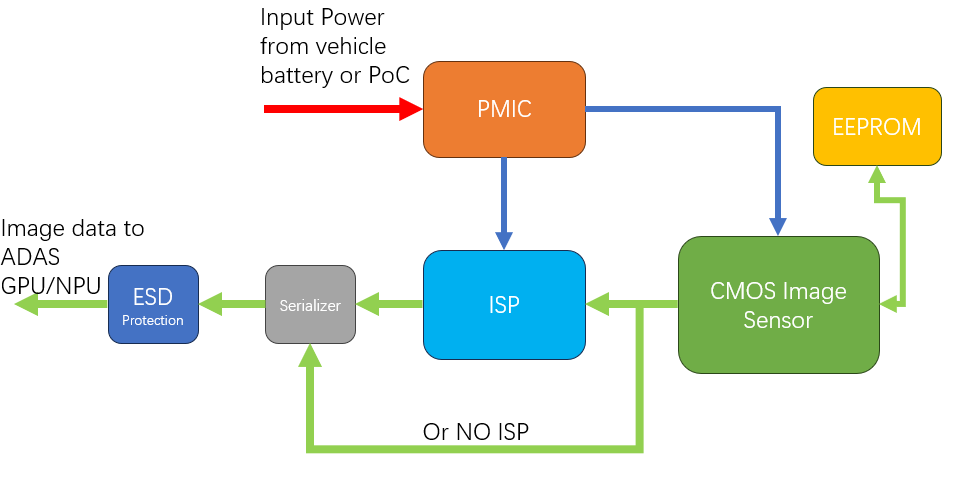
基于CV和人眼视觉的应用需求,行车采用Raw data的直接加串输出,泊车采用双路输出(RawData直接加串到CV,或者经过ISP加串到大屏)。
3、自驾Camera 镜头

将Camera分解为FR4板和Lens两个模块,FR4板自己设计,Lens外采并尽量标准件产品。具有以下几个优势: 行业普遍采用该方式,模块化设计符合未来技术发展方向;
FR4板综合成本(单物料总量最大,维护物料品类最少)最优,以及对Serdes接口种类、ISP需求都会统一化,另外也会对后端感知算法的图片裁切统一化带来便利。
Lens更加自驾的功能覆盖范围需求尽量外采,同时确保标准件;(减少设计风险尤其是量产工艺风险,最小化成本)
FR4板直接向信号处理层对接,包括CIS的Pixel规格和数据传输规格Serdes;
FR4板和Lens可以分别进行标准化设计,后续根据不同自驾系统配置场景,进行不同的FR4板和Lens的组合,从而极大缩短后续开发周期;
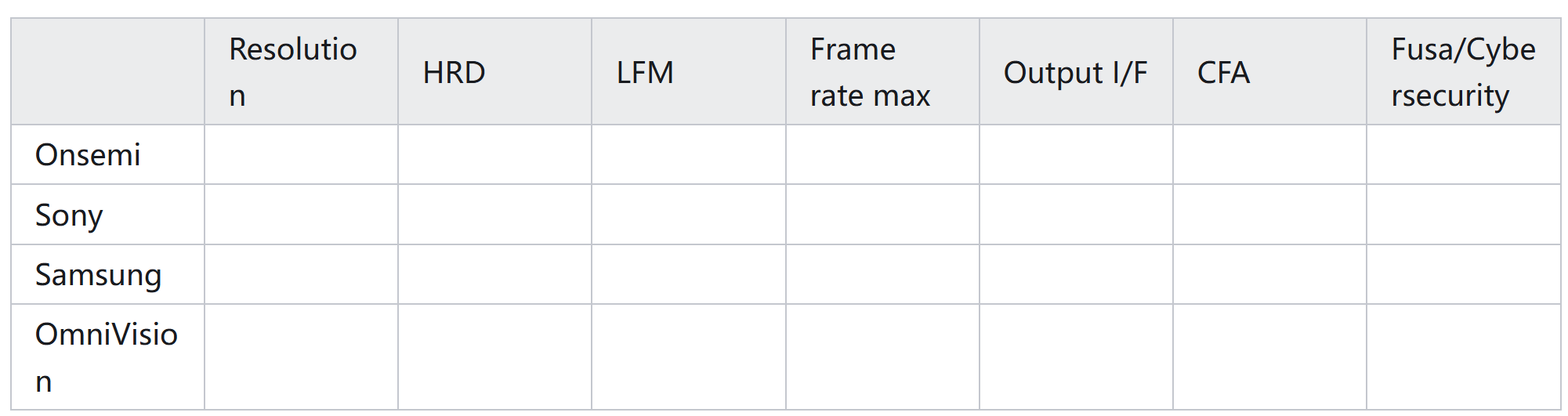
4、CIS选型
为了适应未来的自动驾驶需求,CIS参数需求如下: 可以将以下表格分别针对3MP、5MP、8MP、High MP CIS进行重复工作
5、Camera设计指标确定

6、Camera 量产工艺管控
自驾摄像头的密封是确保其在复杂环境条件下稳定运行和长期使用寿命的关键技术。通过采用高性能密封胶、O形圈密封设计、柔性套密封结构以及防水接插件等技术手段,可以有效防止水分、灰尘等外部因素对摄像头内部元件的损害。
耐候性与耐腐蚀性 汽车摄像头经常暴露在高温、低温、湿度、酸雨等复杂环境中。施敏打硬8008胶水和乐泰5900密封胶均具备良好的耐候性和耐腐蚀性,能够抵御紫外线、酸碱等化学物质的侵蚀,确保密封层长期保持良好状态。
抗老化与长寿命 8008胶水具有出色的抗老化性能,能够在长时间的日晒雨淋下保持稳定的密封效果。此外,其粘合性强,能够牢固粘合多种材料,有效防止雨水、盐雾等对摄像头的侵蚀,从而延长摄像头的使用寿命
7、CIS板与传输板设计
采用技术开发方案如下,具体方案考虑信息为
CIS芯片采用??MP;
单CIS方案和CIS+ISP方案适配不同的Camera需求;
加串器采用??;
CIS芯片数据输出端口采用CPHY或者DPHY接口,摄像头模组用GMSL、FPD-Link或者APHY设计相关接口
8、底软设计和内外参标定
CIS相关技术参数调优;
内外参标定算法设计;
如涉及到Camera端的ISP设计,还需要进行相关图像调优;
功能安全的Monitoring相关配置;