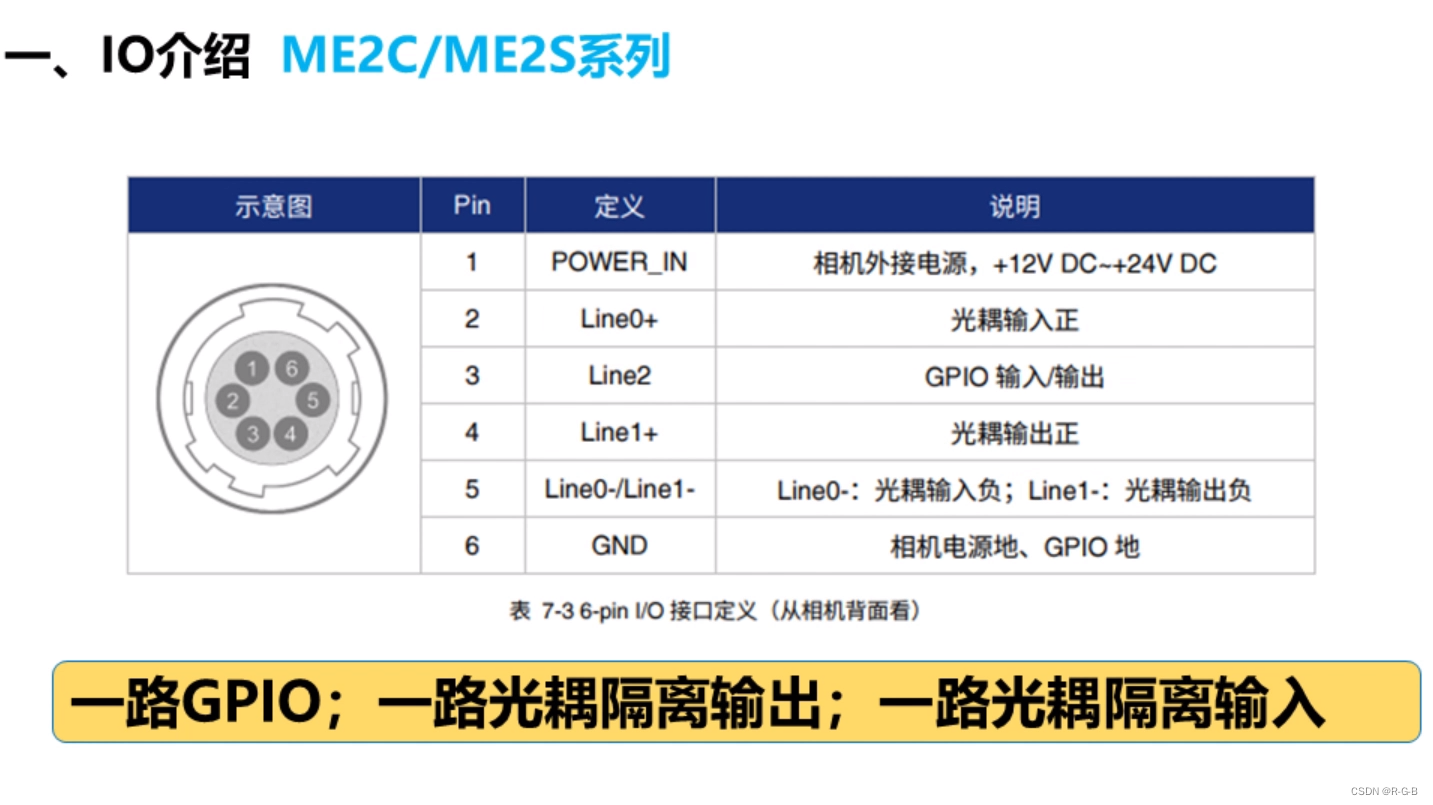
1 IO介绍
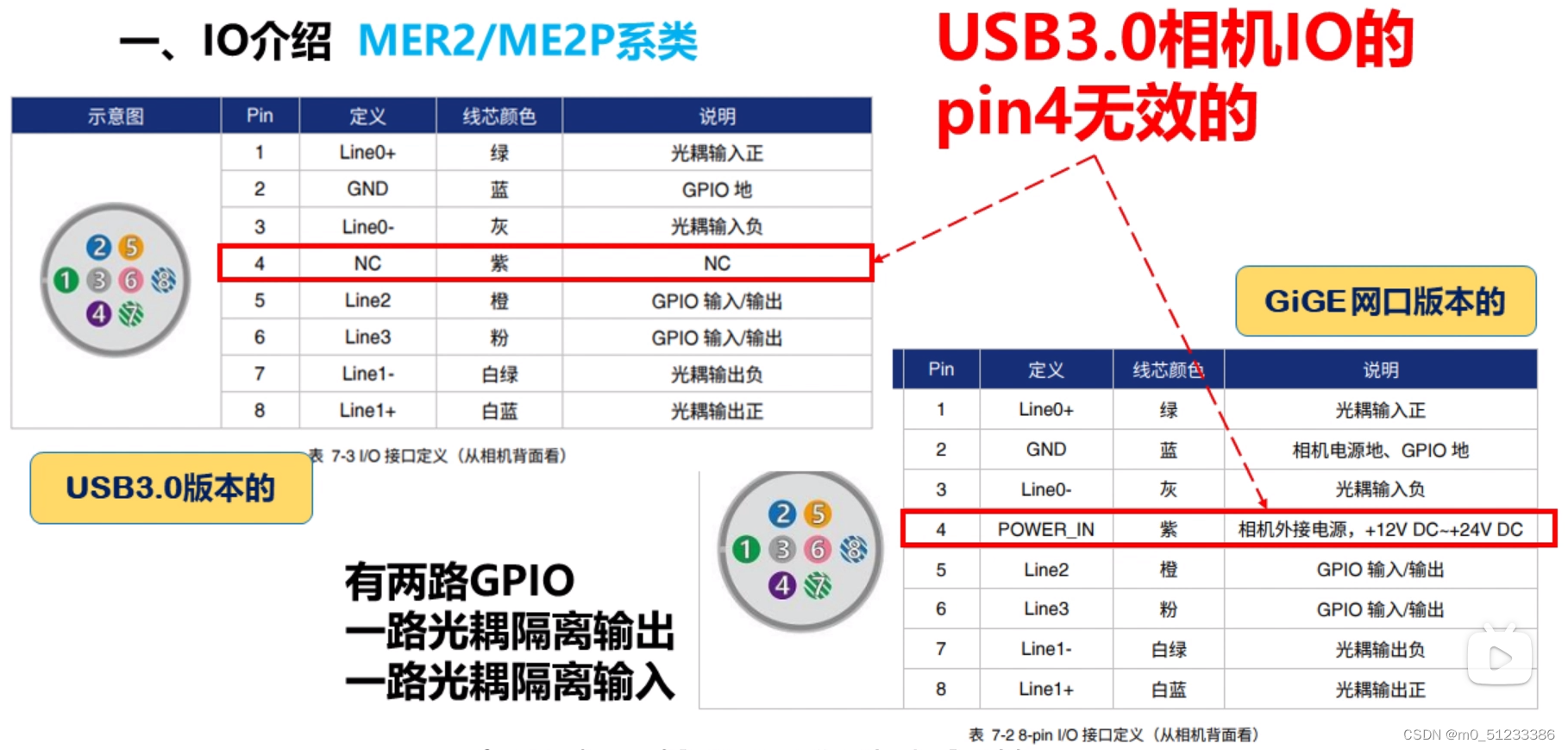
USB相机 pin4是无效的,如果接了12V,可能会烧坏电脑主板;


2 连接出发
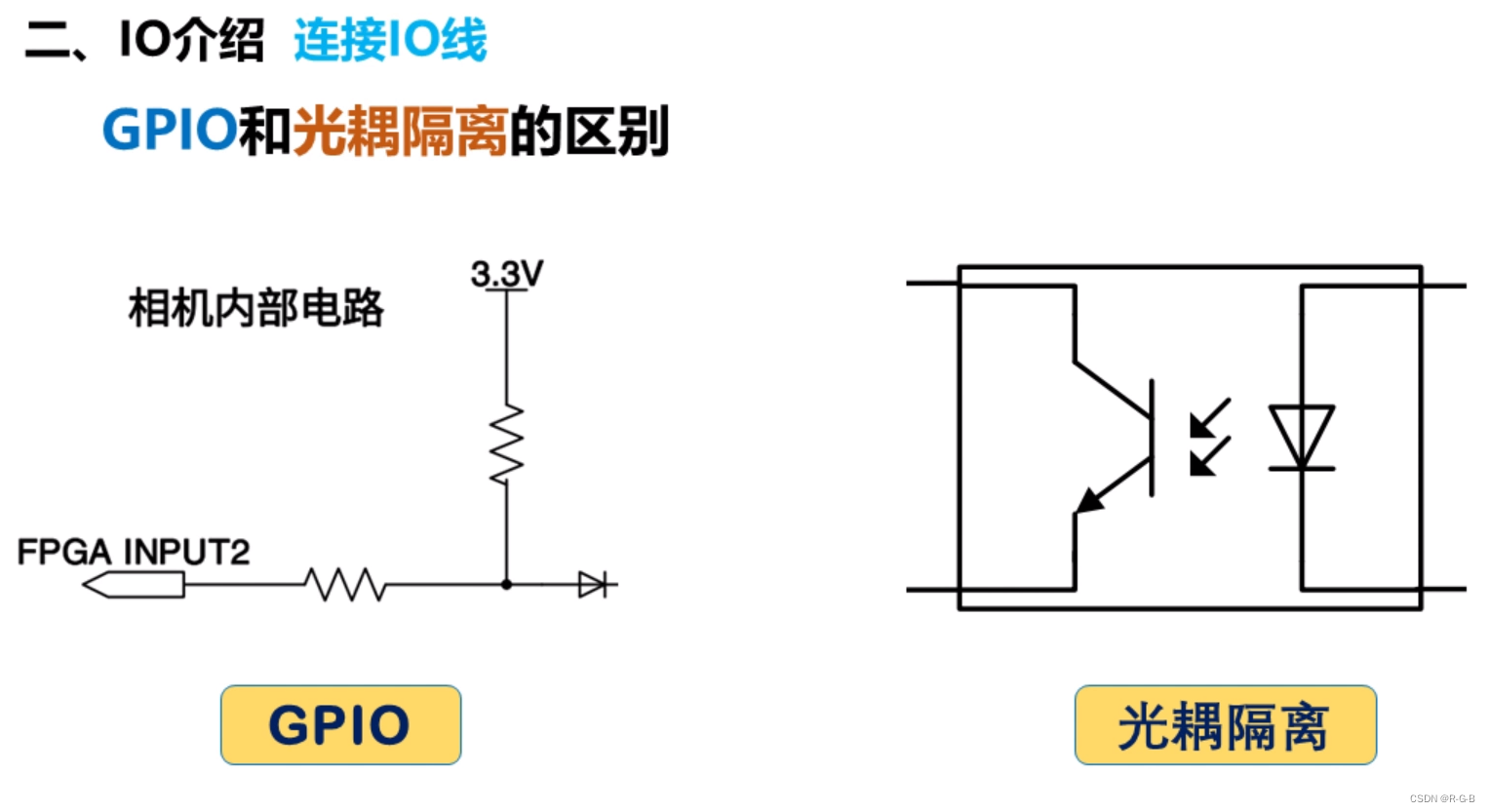
响应速度:
FPGA响应速度非常快,适合高频电路;
光耦隔离 响应速度会慢一些;
**安全角度:**
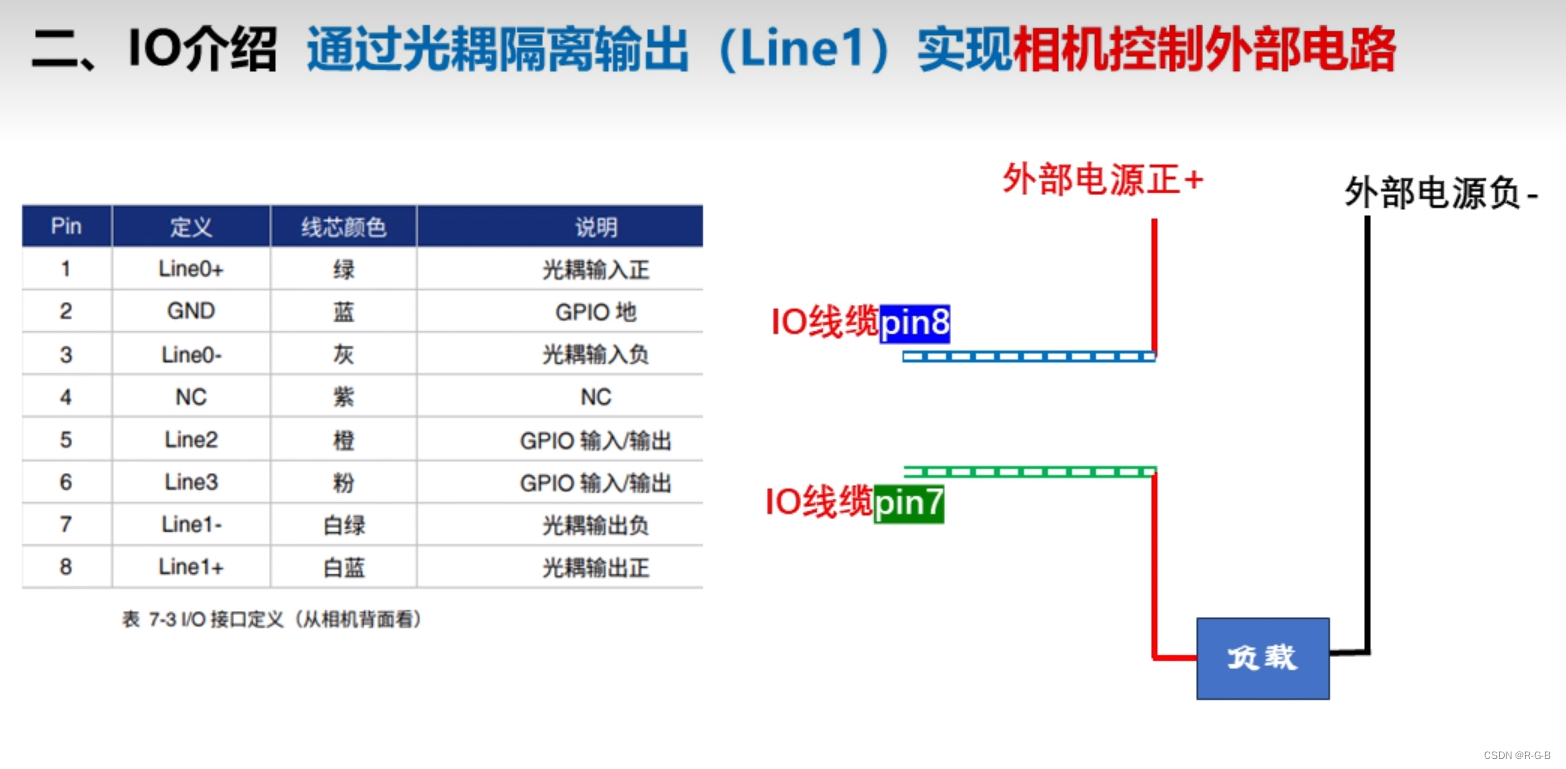
光耦更安全,如果电压接错成高电压,会直接损坏FPGA芯片,相机就不能采集图像了,
但光耦连接的话只会损坏光电二极管,对相机采集没有影响;
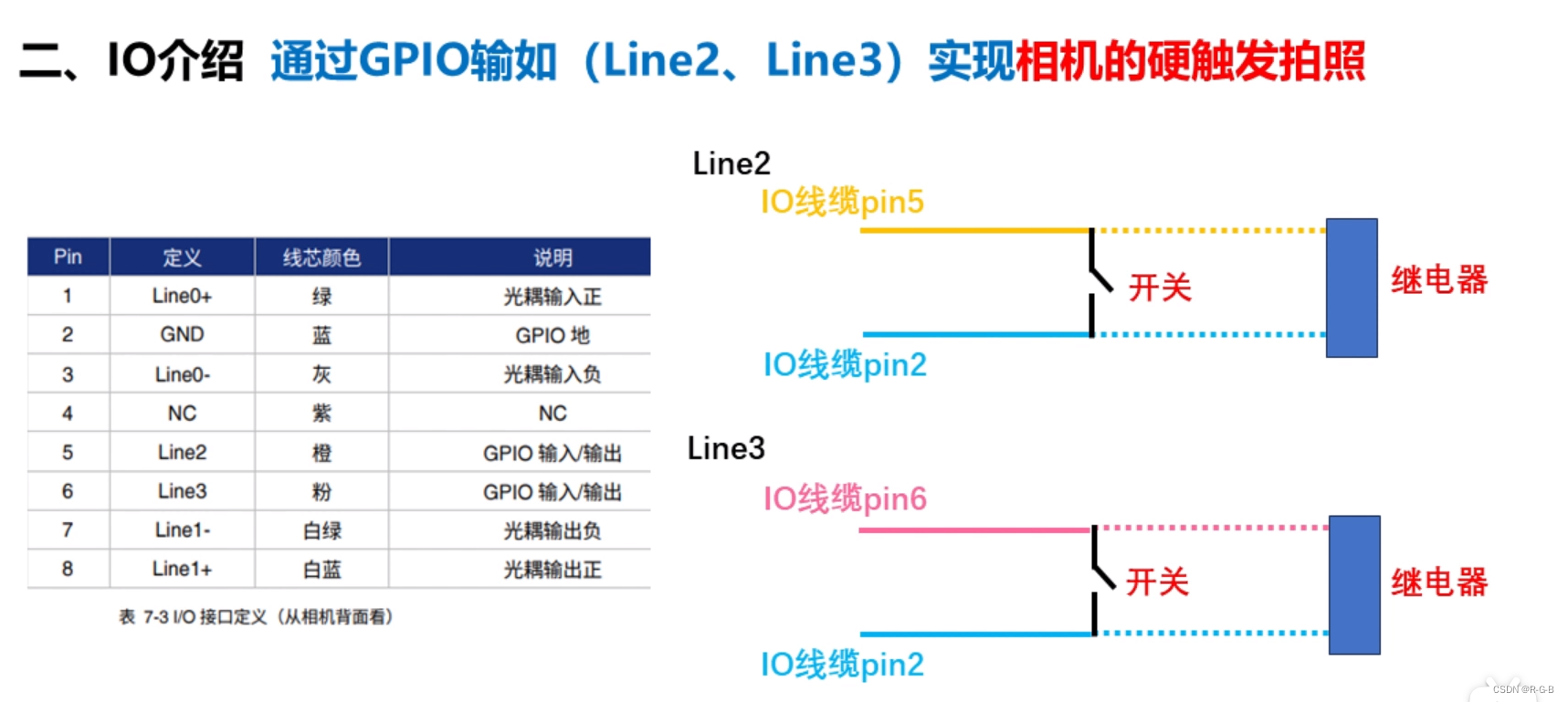
pin5 和 pin2 短接 触发相机拍照;
或 pin6 和 pin2 短接 触发相机拍照;
2 视频教程
【大恒工业相机SDK开发C#版】相机IO触发采集与信号输出