[2025CVPR]HUGNet2架构:事件相机光流估计
一、研究背景与问题
-
事件相机的优势
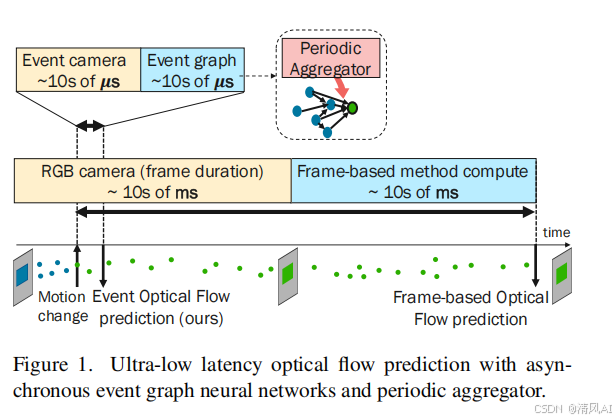
- 异步检测光强变化,微秒级时间分辨率,适用于低延迟、低功耗的光流估计(如自动驾驶、避障)。
- 传统方法的局限:
- 基于帧的CNN方法需构造事件帧,丧失异步计算和低延迟潜力。
- 纯事件图方法(如HUGNet)避免时间累积,但缺乏全局上下文,精度受限。
-
核心挑战
- 如何平衡精度(需时间/空间聚合)与超低延迟(避免未来数据依赖)。
二、创新方法:HUGNet2+PA架构
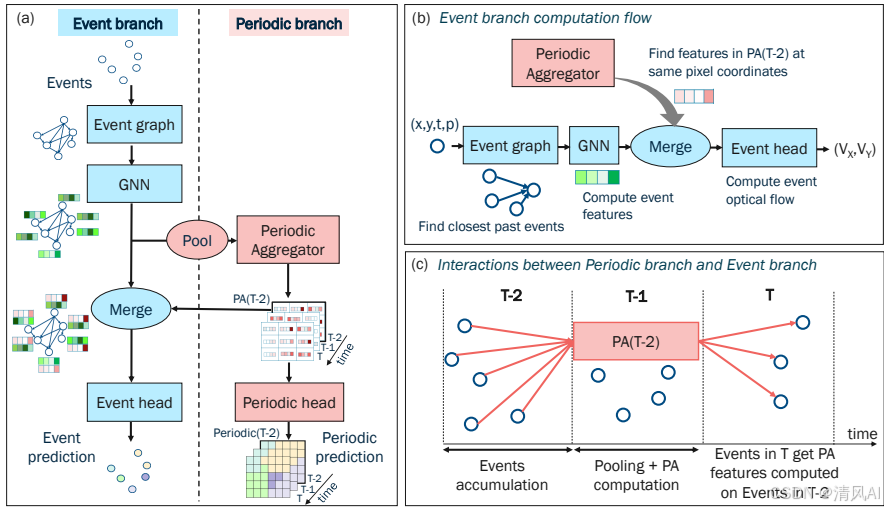
提出双分支混合架构(图2),结合异步事件图与周期性聚合:
-
事件分支(HUGNet2)
- 改进HUGNet:移除归一化与法向量计算(避免未来数据依赖),首层改用PointTransformerConv(精度↑,参数量↓)。