求hom_math_2d的角度值
hom_mat2d 是 3×3 矩阵
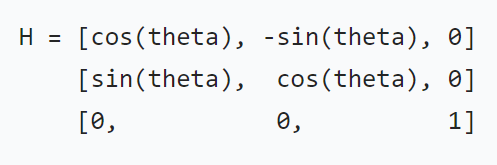
那么这个 theta的值应该等于
a:=atan2(sina, cosa)
hom_mat2d_identity (HomMat2DIdentity)
hom_mat2d_translate (HomMat2DIdentity, 64, 64, HomMat2DTranslate)
hom_mat2d_rotate_local (HomMat2DTranslate,3.14/4, HomMat2DRotate)
hom_mat2d_scale_local (HomMat2DRotate, 2, 2, HomMat2DScale)sina:=HomMat2DScale[0]
cosa:=HomMat2DScale[3]
a:=atan2(sina, cosa)