强化学习之策略熵坍塌优化-clip conv kv conv
策略熵(Policy entropy)。
策略熵用于衡量智能体所选动作的可预测性或内在随机性。给定策略模型 πθ 和训练数据集 D,我们通过计算模型在训练数据上的平均 token 级熵来度量策略熵,其定义如下:
该熵值量化了策略对当前提示的不确定性水平,并被广泛用作最大熵强化学习中的正则化项(Ziebart et al., 2008;Haarnoja et al., 2017, 2018)。在实际操作中,我们对从训练数据中随机采样的每一批提示计算其熵值。

二 clip-cov: 控制策略熵
The Entropy Mechanism of Reinforcement Learning for Reasoning Language Models
2.1 策略熵的坍缩
本文研究LLM RL训练的重要问题:策略熵的崩塌。
这种现象在大规模RL训练中经常出现,若不引入熵的调控,策略熵会在训练初期迅速下降,导致模型过度自信,探索能力减弱,策略性能饱和。
本文建立了一个熵与模型性能之间的转换公式,表明策略性能是以策略熵为代价换来的,熵的耗尽会成为性能提升的瓶颈,并且可以根据熵来预测RL训练出的模型能力的上限。
本文的推导指出:策略熵的变化是由动作概率与logits变化之间的协方差驱动的,实验表明,协方差项的数值变化与熵的变化几乎完全匹配。
本文进一步提出了控制策略熵的方法,限制高协方差token的更新,
包括Clip-Cov方法:对高协方差token的梯度进行裁剪;随机选取少量协方差为正的 token 并切断其梯度;
以及KL-Cov方法:对高协方差token引入KL惩罚。对协方差最大的 token 施加 KL 惩罚。
实验结果表明,这些方法鼓励了探索行为,从而有助于策略避免熵崩塌,提升模型的性能。
2.1.1 策略熵为什么重要
强化学习的核心难题在于利用–探索权衡(Sutton, 1988):在复用已被验证的策略与搜寻全新策略之间取得平衡。
就探索而言,一个关键概念是策略熵,它衡量策略在选择动作时的不确定性。
在 RL 文献中,抑制策略熵下降被视为多数算法的必要条件,并通过正则化手段对策略熵进行积极引导与主动控制。
2.1.2 策略熵坍缩很常见,且与性能提升密不可分
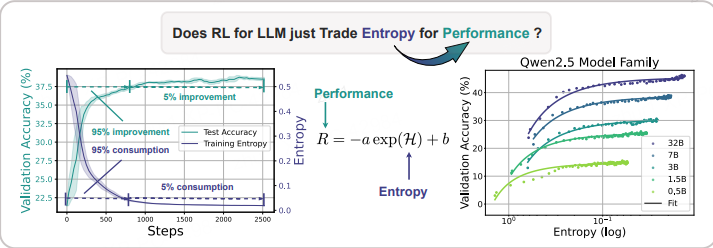
图 1 左:熵坍缩与性能饱和。超过 95% 的熵下降 / 性能提升发生在 RL 训练早期。随后模型进入平台期,几乎不再提升。
右:验证性能与策略熵之间的可预测关系。在无干预情况下,策略以指数方式“拿熵换性能”,出现清晰可见的上限,阻碍进一步改进。
总结公式:R = −a exp(H) + b
- 与 Scaling Law类似,利用–探索曲线在给定策略模型与训练数据后即被预先决定。这使我们可以在 RL 早期阶段就预测策略性能,并借助小模型预测大模型性能
- 更重要的是,该方程表明策略性能的上限也是确定的:当策略熵耗尽(H = 0)时,R = −a + b,因此继续扩大 RL 训练算力的边际收益可能极低。更糟糕的是,朴素地使用熵正则化方法已被证明无效(第 4.1 节)。简言之,严重制约了 LLM 推理任务中 RL 的可扩展性。
系数 a、b 反映了策略与数据的内在特征;
2.1.3 熵–与高协方差的关系,引入新方法
从理论与实验两方面分析了熵的动态。
关键发现是:
- 对 LLM 这类 softmax 策略而言,相邻两步之间的熵变正比于某动作的 log-probability 与对应 logit 变化之间的协方差(Liu, 2025)。
- 进一步地,在策略梯度或自然策略梯度类算法下,logit 差正比于动作优势值。
- 直观上,高优势且高概率的动作会降低策略熵,而高优势但低概率的动作会提升熵。这一理论结论被实验结果验证。
训练早期,策略在训练数据上呈现高协方差,表明模型信心校准良好(Kadavath et al., 2022),因此可以安全地利用高置信轨迹,强化信念并最小化熵(Zuo et al., 2025; Zhang et al., 2025; Agarwal et al., 2025)。随着训练进行,协方差逐渐下降但仍保持正值,持续将策略熵拉低。
对熵动力学的分析显示,高协方差对可扩展 RL 有害,
从而为我们提升策略熵提供了明确指引:限制高协方差 token 的更新步长。
由此,我们提出两种对应的熵控制策略——Clip-Cov 与 KL-Cov,分别替代代理损失中的裁剪与 PPO-KL 方法(Schulman et al., 2017b)。
实验表明,通过调节阈值参数,我们可以主动控制策略熵,使模型摆脱低熵陷阱,在数学推理任务上取得更优性能。
2.2 历史方法
在可验证的数学推理代码等任务上,通常会用RL微调LLM,优化目标为最大化reward:
最简单的求解方法是policy gradient策略梯度算法,例如reinforce算法:
其中 A_t 表示当前动作的优势(advantage),在不同 RL 算法中有不同的实现方式。


REINFORCE(Williams, 1992)直接将优势定义为A_t = r(y)。
为降低方差,GRPO与 RLOO(Kool et al., 2019; Ahmadian et al., 2024)进一步引入了按组归一化。以 GRPO 为例,它对每个提示采样 K 条完整回答,并按如下方式估计优势:
为了处理 off-policy 数据并限制策略更新幅度,PPO(Schulman et al., 2017b)提出clip优化如下的替代目标函数:

RLOO算法通过减掉reward多次采样的均值来降低方差,对于同一 prompt 在线采样k次,取除自己外的其他
k-1条回答的平均 reward 作为 baseline:
RL的训练过程往往需要关注策略熵,熵越大,模型的探索能力越强。RL训练过程中entropy通常会下降,因此会加入entropy loss来控制策略熵的降低。
但是这类entropy loss的方法效果有限
2.3 观察实验设置
本文选取了Qwen,Mistral,Llama等多个模型,
训练数学和代码数据,
在MATH500,AIME2024,AMC,OlympiadBench,OMNI-MATH, Eurus-2-RL-Code,KodCode等benchmark上进行测试。
- 从零开始:采用 “Zero” 设定(DeepSeek-AI et al., 2025),基于 veRL 框架(Sheng et al., 2024)从基础模型启动 RL。
- 算法:GRPO(Shao et al., 2024)、REINFORCE++(Hu, 2025)、PRIME(Cui et al., 2025)。
- 超参数:
– 策略模型学习率 5 × 10⁻⁷;PRIME 中的隐式 PRM 学习率 10⁻⁶(Yuan et al., 2025)。
– 策略与 PRM 的 batch size 均为 256,micro-batch size 为 128。
– rollout 阶段采集 512 条提示,每条提示采样 8 条回答。
– 默认参考 KL 散度系数设为 0。
– 策略损失的 ϵ(公式 4)取 0.2。- 数据过滤:剔除那些收到全部正确或全部错误回答的提示。
2.3.1 entropy loss与性能
实验结果表明,entropy的下降和性能的提升呈正相关的关系:高度一致的模式
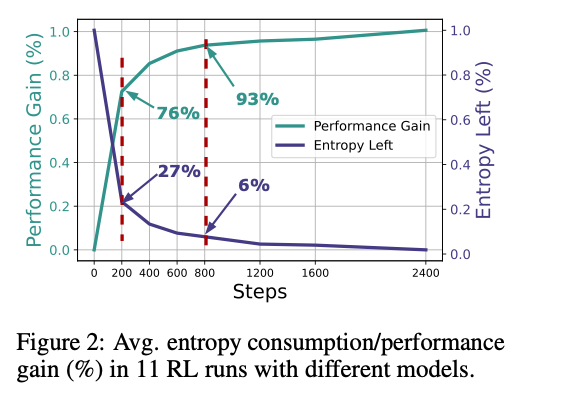
展示了 11 个模型在 2400 个梯度步 RL 训练过程中,熵消耗与性能提升的平均归一化百分比。可以看到:
• 前 200 个梯度步(仅占全程 1/12)就消耗了 73% 的熵并带来了 76% 的性能提升;
• 前 800 个梯度步(占全程 1/3)已累计贡献 94% 的熵损失与 93% 的性能增益。
这意味着剩下 2/3 以上的训练步只带来边际收益。
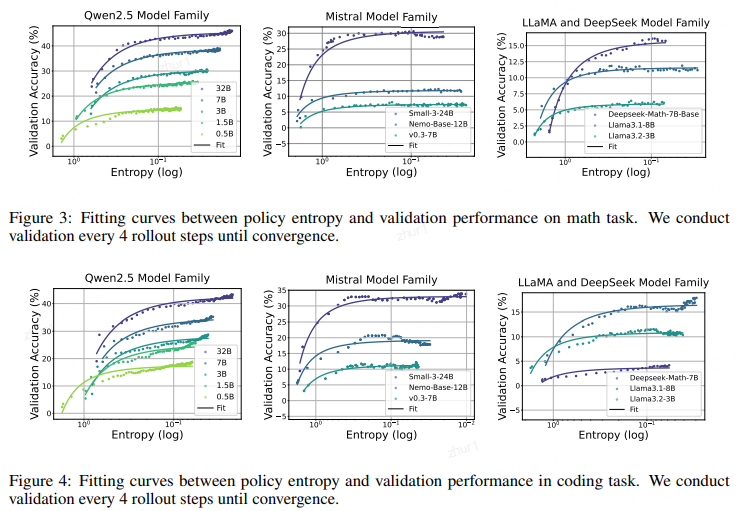
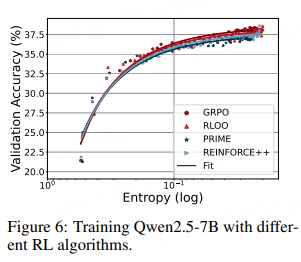
2.3.2 可以高度拟合,两个系数即可
用 R 表示验证性能、H 表示熵,我们发现两者可以用指数关系精确拟合
拟合结果
仅用两个系数即可对 200 多个数据点进行拟合,显示出极高的规律性和一致性。
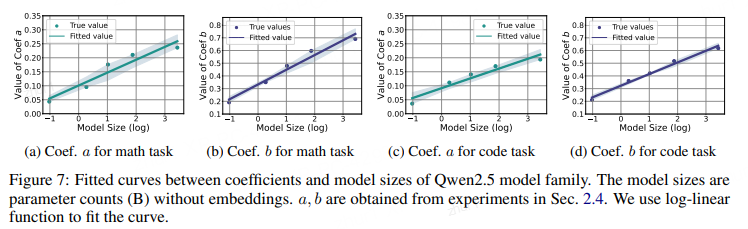
2.6.3 系数与算法无关
我们考察了不同 RL 算法是否会影响拟合函数。图 6 分别给出了 GRPO、RLOO 与 PRIME 的拟合曲线。尽管这三种优势估计方法各异,它们得到的熵–性能函数几乎重合,表明系数 a、b 刻画的是策略模型与训练数据的内在属性,而非算法细节。
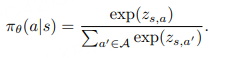
2.6.4 利用系数预测参数放大后的表现
进一步观察 a、b 的含义:
• 对 R = −a eH+ b 求导得 dR/dH = −a e^H,因此 a 表示“每单位熵能换取多少性能”的转换效率;
• −a + b 即熵完全耗尽(H = 0)时的验证分数,是模型在给定数据上的性能上限。
直观上,a、b 应与模型规模相关:更大的模型通常能更高效地用熵换奖励,也能获得更高的极限性能。为此,我们选取架构相同、训练流程一致的 Qwen2.5 家族进行验证。
图 7 绘制了模型参数量(不含嵌入层)与 a、b 的关系。可以看到,在数学与编程任务上,a、b 均随模型规模呈平滑的对数–线性变化。这种 log-linear 规律也在 Gao et al. (2022) 中被观察到。因此,只需用小模型跑完训练并记录 a、b,即可外推同家族大模型的系数,从而无需真正训练大模型就能预测其最终 RL 性能。图 13 进一步表明,系数还与训练数据有关。
2.4 策略熵的动力学分析
2.4.1 核心结论
(1) 对于包括 LLM 在内的 softmax 策略,策略熵的变化由动作 log-probability 与其 logits 变化的协方差决定。
(2) 在策略梯度(Policy Gradient)和自然策略梯度(Natural Policy Gradient)下,logits 的变化正比于动作优势(advantage),因此高协方差将导致策略熵迅速下降——这正是我们在 LLM 推理 RL 中观测到的熵坍缩现象。
我们已经揭示,熵坍缩问题将严重阻碍 LLM 推理任务的 RL 规模扩展。为破解这一难题,需要对策略熵的动力学建立更系统的理解:熵何时下降,何时上升。本节聚焦“步级”熵差 H(π^{k+1}_θ) − H(π^k_θ)。首先从理论出发,4.2 节推导 softmax 策略熵的一阶微分;4.3 节进一步推广到策略梯度与自然策略梯度算法;4.4 节用实验验证结论。
2.4.2 softmax 策略的熵动力学
在第 k 步,我们希望计算一次参数更新前后的熵差,即 H(π^{k+1}_θ) 与 H(π^k_θ)
softmax形式定义
其中 s ∼ d^{π_θ} 和 a ∼ π^k_θ(·|s) 分别表示状态与动作的采样,z_{s,a} 是给定状态 s 下动作 a 的 logit 输出。对于任意 softmax 策略,我们有如下引理:
引理 1(softmax 策略的熵差)(证明见附录 E.2,改编自 Liu, 2025)
假设策略 π_θ 是一个表格形式的 softmax 策略,每个状态-动作对 (s, a) 对应一个独立的 logit 参数 z_{s,a} = θ_{s,a},则在一步更新后,给定状态 s 的策略熵差在一阶近似下满足:

该引理表明,策略熵的变化近似等于动作 log-probability 与 logit 变化之间的负协方差。换言之,若某个动作 a 在更新前被策略赋予高概率,且其对应 logit 在更新后又上升,那么它将导致策略熵下降。
2.4.3 策略梯度 / 自然策略梯度下的熵动力学
由引理 1 可知,logit 的步级变化 z{k+1}{s,a} − zk{s,a} 决定了熵变,而这一变化又依赖于具体算法。
下面我们进一步推导在策略梯度(Williams, 1992)和自然策略梯度(Kakade, 2001)下的 logit 变化。
假设我们使用策略梯度更新 actor 策略,则有
z{k+1}{s,a} − zk{s,a} = −η · ∇_z J(θ),
其中 J(θ) 是目标函数,η 是学习率。
根据式 (2) 计算 ∇_z J(θ),我们得到如下命题:
命题 1(vanilla 策略梯度下的 logit 差)(证明见附录 E.3)
若 actor 策略 π_θ 为表格 softmax 策略,且按式 (2) 以学习率 η 做梯度回传更新,则两步之间的 logit 差满足:

2.4.4 实验分析
我们使用 GRPO 并在纯策略梯度(on-policy,无 PPO 代理损失)方式下训练 Qwen2.5-7B。
采用 bandit 设定:提示 x 视为状态,整条回复 y 视为动作。
此时协方差项简化为
Cov_{y∼π_θ(·|x)} [log π_θ(y|x), A(y)]。
训练期间,我们对每个 prompt 计算组内协方差并在批次内取平均,同时对 log-prob 按回复长度归一化。
实验结果
记录两个关键指标:协方差 Cov(·) 与步级熵差−dH(π_θ),并分析其关系与动态:
Cov(·) 与 −dH 的动态一致性
定理 1 指出 −dH ∝ Cov(·)。
图 8 左显示,二者曲线高度重合,为定理提供了强有力实证。训练早期熵迅速下降,Cov(·) 保持较大正值;随着训练推进,熵降趋缓,Cov(·) 亦降至较低水平,反映策略逐渐收敛。整个过程中 Cov(·) 始终为正,导致熵持续下降。
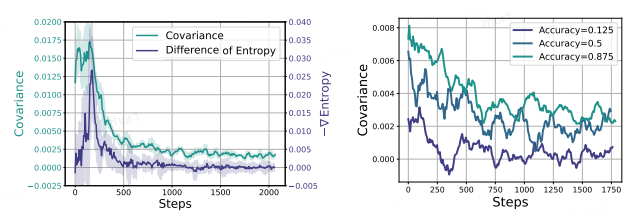
不同难度样本的 Cov(·) 差异
利用组采样策略,我们按准确率将样本分为易、中、难三组。图 8 右显示:
• 难度越高(准确率越低)的样本,Cov(·) 幅度越小;
• 难度越低(准确率越高)的样本,Cov(·) 幅度越大。
这与直觉相符:模型在易样本上更自信且校准更好,高概率动作与优势估计高度对齐;在难样本上学习困难,高概率动作并不总伴随更高回报,故协方差减小。
2.5 通过协方差正则化实现熵控制
核心结论
限制高协方差 token 的更新幅度即可有效控制策略熵。我们提出了两种简单却高效的方法:
• Clip-Cov:随机裁剪少量高协方差 token 的梯度;
• KL-Cov:对高协方差 token 施加 KL 惩罚。
二者都能阻止熵坍缩、促进探索,并在下游任务上取得更好性能。
2.5.1 熵正则化的局限性
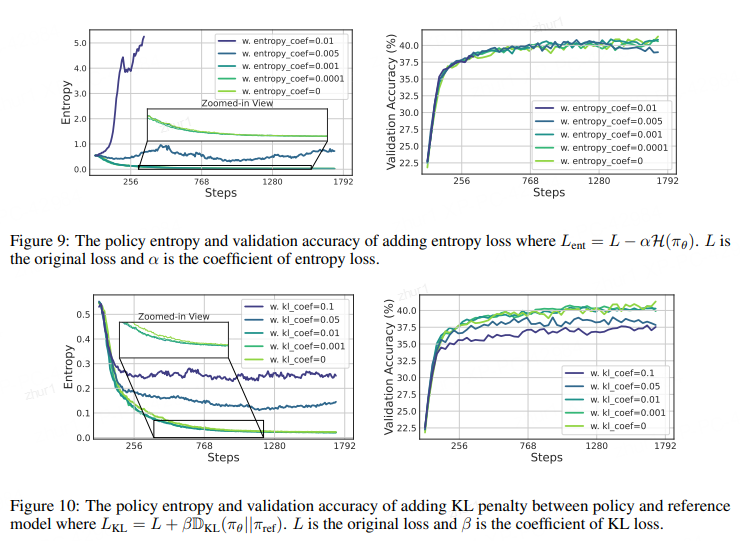
传统 RL 常用熵损失(entropy loss)或参考 KL 惩罚来控制熵。我们在 LLM 上的实验表明:
• 熵损失对系数极度敏感:小系数(0.0001, 0.001)几乎无效;大系数(0.01)导致熵爆炸;即使 0.005 能稳定熵,也无法超越基线(图 9)。
• 参考 KL 虽能稳住熵,却带来性能下降(图 10)。
综上,简单沿用传统熵正则化在 LLM 上不仅超参敏感,还可能损害性能,因此近期工作普遍舍弃它们(Cui et al., 2025; Hu et al., 2025; Liu et al., 2025; Yu et al., 2025)。
这里可以认为性能是由entropy转换带来的,模型起始entropy越大,最终RL训练出的模型能力越强。
本文提出了entropy和模型性能之间存在下列公式:
同时,当entropy=0时,可以计算出性能的上界。
2.5.2 基于协方差的控制方法
既然熵动力学与“动作概率 × 优势”的协方差紧密相关,而表 1 显示极少量 token 的协方差远大于均值,正是这些“离群” token 主导了熵坍缩。
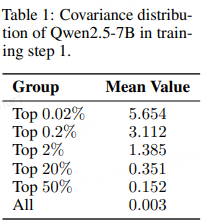
因此,我们借鉴 PPO 的裁剪/ KL 约束思想,提出两种“协方差感知”方法:
- 定义
对一批 N 个 rollout token,
记 πθ(y_i) 为第 i 个 token 在给定前缀下的输出概率。
根据定理 2,先定义 token-wise 中心化交叉积:
Cov_i = (log πθ(y_i) − μ_log)(A(y_i) − μ_A)
其中 μ_log、μ_A 为批次均值;Cov_i 的期望即定理 2 中的协方差。
Clip-Cov
计算 Cov_i 后,随机选取比例 r·N 的高协方差 token(Cov_i 最大的一批),将它们从策略梯度中“梯度断流”:若 token i 被选中,则 ∇_θ log πθ(y_i) 不再回传。
其中 I 表示被选中的 token 索引集合,r 为裁剪比例;ω_low、ω_high 是两个预设的协方差阈值,远高于平均协方差(>500 倍)。最终,凡索引落入 I 的 token,其梯度将被断开
其中 t 表示一条 rollout 响应中的第 t 个 token,每个 t 在全局批次 N 中都有唯一索引 i。

KL-Cov
KL-Cov 策略更为简洁。首先,与 Clip-Cov 一样计算每个 token 的协方差 Cov_i;随后对所有 token 按 Cov_i 降序排序,选出前 k 比例的 token(k ≪ 1)。最后,仅对这些选中的 token 施加 KL 惩罚(当前策略与 rollout 策略之间的 KL 散度)。此时的策略损失为:
其中 β 为 KL 惩罚权重系数。完整伪代码见 Listing 1。

2.5.3 实验设置
我们在数学任务上训练 Qwen2.5 系列模型,以验证 Clip-Cov 与 KL-Cov 的有效性。
训练数据使用 DAPOMATH(Yu et al., 2025)。
• 每个 rollout 步:对 256 条提示用温度 1.0 各采样 8 条回答,随后执行 8 次策略更新。
• 过滤掉“全对 / 全错”提示。
测试集:MATH500、AIME 2024/2025、AMC、OMNI-MATH、OlympiadBench、Minerva。评估时 AIME、AMC 温度 0.6,其余贪心解码。
基线与超参
• 基线:原始 GRPO;GRPO-Clip-higher(PPO 上阈值 ϵ 调为 0.28,Yu et al., 2025)。
• Clip-Cov:裁剪比例 r = 2×10⁻⁴,阈值 ω_low = 1,ω_high = 5。
• KL-Cov:比例 k = 2×10⁻³(7B)/ 2×10⁻⁴(32B),KL 系数 β = 1。
• 最大生成长度 8192。
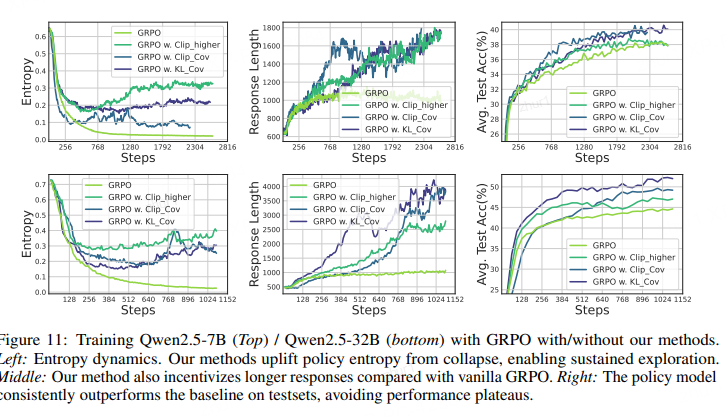
训练全程,KL-Cov 的熵始终保持在基线 10× 以上;基线熵率先触顶后停滞,而 KL-Cov 仍能继续下降并带来性能增长。
• 模型响应长度随训练稳步增加,验证集性能持续超越基线,说明方法在训练中持续“自由”探索,学到更优策略。
• 与 Clip-higher 相比,后者虽能在早期提升熵与性能,但后续逐渐不稳定,性能先饱和后下降;而本方法熵曲线更稳,最终显著优于基线。