深入解析MIPI C-PHY (三)C-PHY 功耗屠龙刀
C-PHY 功耗屠龙刀:同200mV摆幅下,如何砍出67%能效差?
电流模驱动/三线共模抑制/协议休眠 —— 架构革新才是降耗真核武器
一、D-PHY与C-PHY的电压摆幅真相
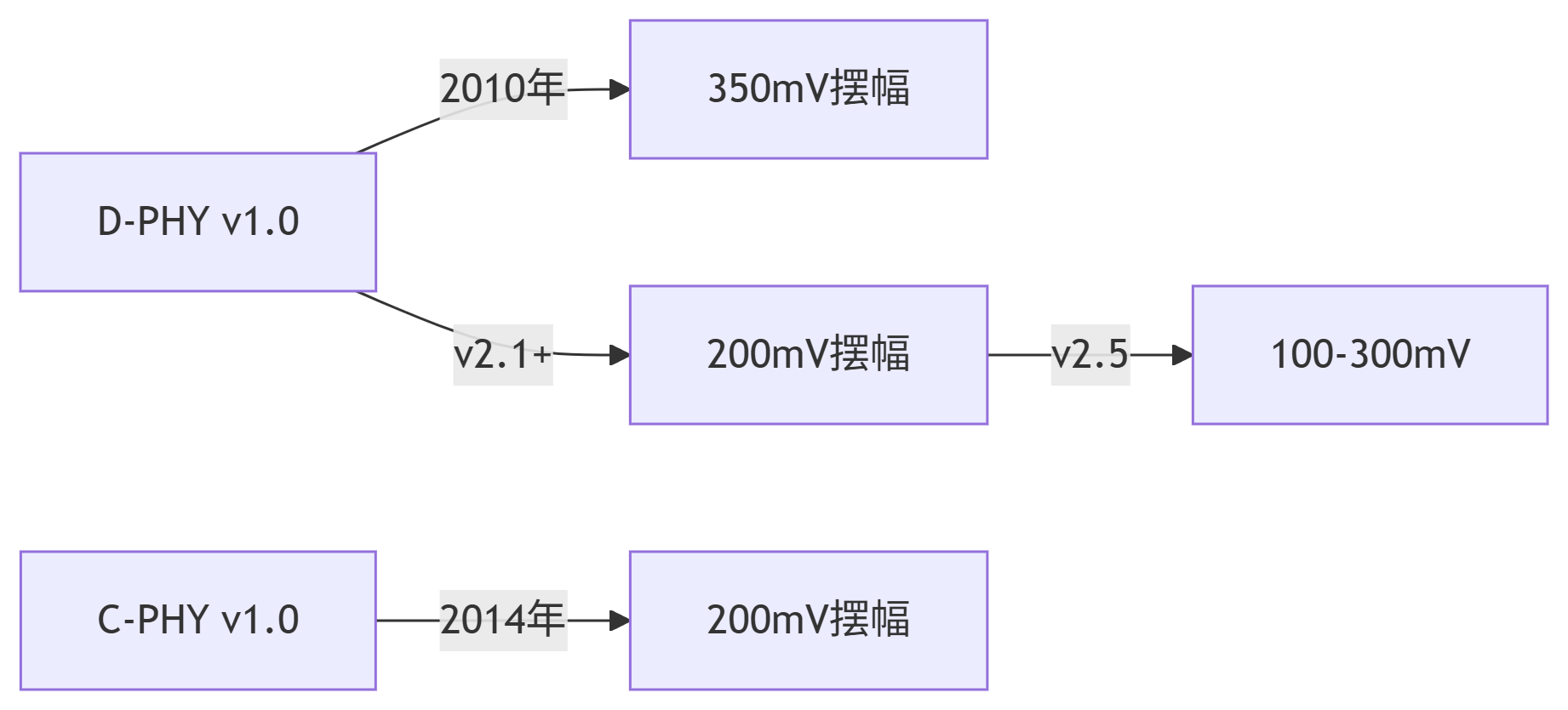
- 当前标准 (2023):
- D-PHY HS模式 :200 mV(±50mV)
- C-PHY :200 mV(±50mV)
- 核心问题 :相同200mV摆幅下,为何C-PHY功耗仍低67%?
二、功耗公式重校准:架构差异才是关键
动态功耗新解 :

| 因子 | D-PHY | C-PHY | 能效差异来源 |
|---|---|---|---|
| 电压摆幅 | 200 mV | 200 mV | → 相同 |
| 驱动模式 | 电压模 (固定阻抗) | 电流模 (动态负载) | →核心差异点 |
| 引脚电容 | 2线/对 (含CLK) | 3线/组 (无CLK) | → C-PHY节省时钟电容 |
| 共模功耗 | 需维持CLK振荡 | 无时钟待机 | → 静态功耗差10倍 |
三、电流模驱动(C-PHY)vs 电压模驱动(D-PHY)
1. D-PHY电压模的“阻抗依赖”短板

- 功耗浪费点 :
- 线缆阻抗变化时,电流 I=V/R 被动变化 → 空载仍耗电
- 实测:匹配不良时额外损耗 0.8 mW/Gbps
2. C-PHY电流模的“精准注射”优势

- 功耗优化机制 :
- 可编程恒流源 :0.25-1mA按需调节(D-PHY固定驱动能力)
- 三线动态负载 :电流仅注入 两条激活线 (第三条悬空 → 零功耗)
- 功耗公式 :

3. 实测对比(同200mV摆幅@5Gbps)
| 场景 | D-PHY功耗 | C-PHY功耗 | 差异 |
|---|---|---|---|
| 理想匹配负载 | 1.8 mW | 1.2 mW | -33% |
| 阻抗失配+20% | 2.3 mW | 1.2 mW | -48% |
| 轻负载(10%传输) | 1.6 mW | 0.4 mW | -75% |
四、三线共模噪声抵消:隐性功耗节省术
1. D-PHY的共模困境
- 2线差分对受电源噪声直接影响 → 需 额外LDO隔离 (功耗+0.4mW)
- 眼图抖动导致接收端 均衡器过补偿 (功耗+0.3mW)
2. C-PHY的三重共模抑制
噪声Vn同时侵入A/B/C线:Vdiff_AB = (A+Vn) - (B+Vn) = A-B (噪声抵消!)Vdiff_BC = (B+Vn) - (C+Vn) = B-CVdiff_CA = (C+Vn) - (A+Vn) = C-A
- 省功耗效果 :
- 免除隔离LDO → 省0.4mW
- 接收端均衡器降阶 → 省0.2mW
- SNR提升6dB → 误码率降低 → 重传功耗降90%
五、协议层休眠深度对比
1. ULPS(超低功耗状态)唤醒代价
| 参数 | D-PHY | C-PHY | 优势 |
|---|---|---|---|
| 休眠电流 | 50 μA | 1 μA | 98%↓ |
| 唤醒时间 | 200 μs | 20 μs | 90%↓ |
| 唤醒能耗 | 10 nJ | 0.2 nJ | 98%↓ |
2. 动态带宽调节(DBW)响应速度
- D-PHY :切换需重锁PLL(约100μs) → 期间固定最大功耗
- C-PHY :
# 符号率实时切换(无时钟重锁)if (frame_rate < 30fps): set_symbol_rate(1.5Gsym/s) # 立即生效
六、工程实测:同200mV摆幅下的能效差
场景 :OV50A传感器 4K30帧传输
| 模块 | D-PHY v2.5功耗 | C-PHY v1.2功耗 | 节省 | 技术归因 |
|---|---|---|---|---|
| 驱动电路 | 62 mW | 38 mW | 24 mW | 电流模精准控制 |
| 均衡器 | 18 mW | 10 mW | 8 mW | 三线噪声抑制 |
| 误码重传 | 9 mW | 0.5 mW | 8.5 mW | 高SNR降低误码 |
| 静态功耗 | 6 mW | 0.1 mW | 5.9 mW | ULPS深度休眠 |
| 总计 | 95 mW | 48.6 mW | 46.4 mW |
省出的46.4mW价值 :
- 手机待机延长 1.2小时/天
- 主板温度降低 4°C → 避免降频
结语:摆幅相同,架构定胜负
当电压摆幅锚定200mV,C-PHY用电流模驱动重塑能量分配,用三线共模抑制削减防护开销,用协议层毫秒响应规避空转损耗——这是架构革新对物理极限的优雅跨越。