具身智能系列教程——(一)具身智能研究与发展
这里具身智能我打算通过三篇文章来介绍具身智能的相关内容,分别是具身智能的研究与发展前景相关,然后是关于仿真环境搭建相关的内容,分为isaac sim和gazebo两个大的种类。
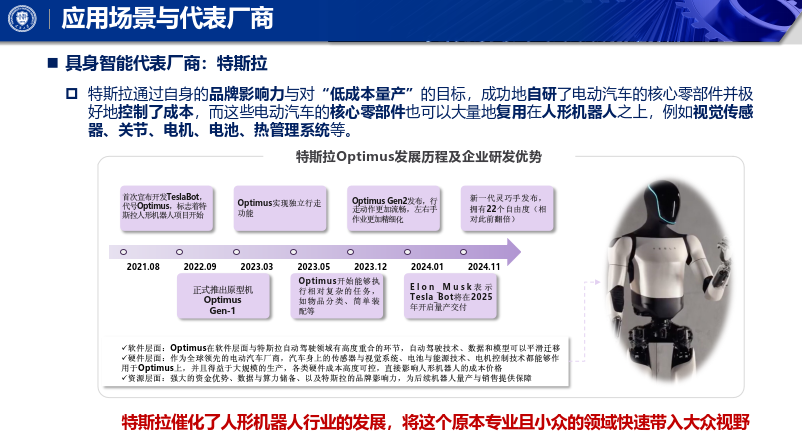
首先是一些重要的时间,从春晚舞台上整齐划一跳舞的人形机器人,到北京机器人半马的活力奔跑,再到杭州机甲格斗赛的热血对抗,具身智能正以极具冲击力的方式闯入大众视野,成为社会热议焦点。

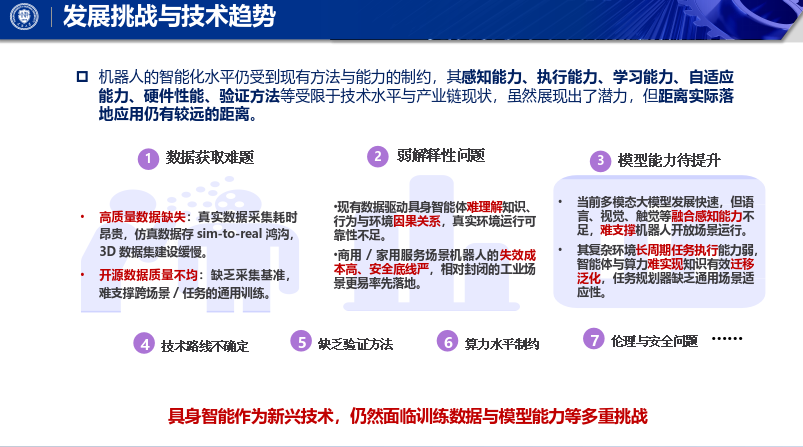
但是在这么火热的技术背后,仍然存在着很多的问题,包括但不限于硬件层面,软件维度和社会伦理层面。
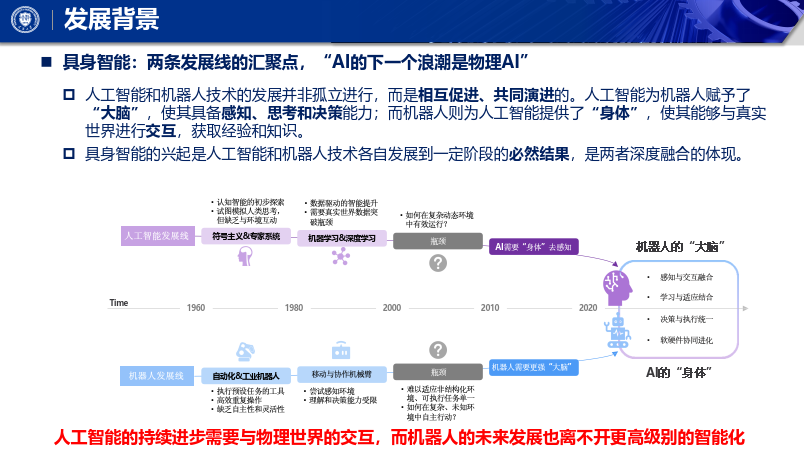
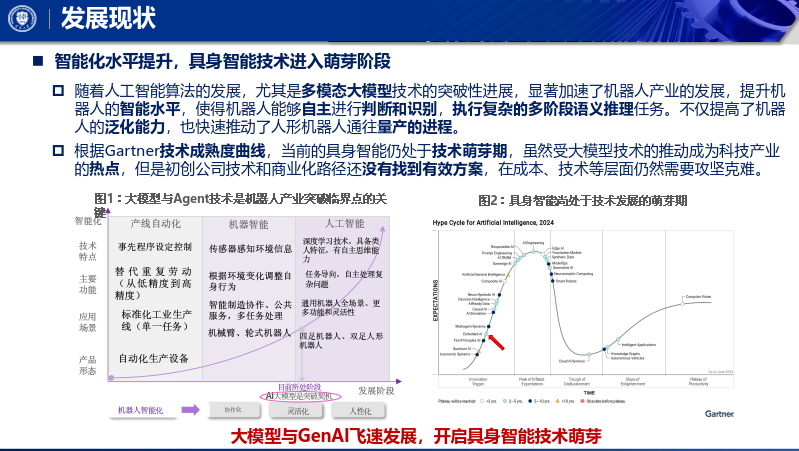
我非常喜欢这里的双线描述,具身智能作为两线交互的必然结果,是必然会崛起的技术。
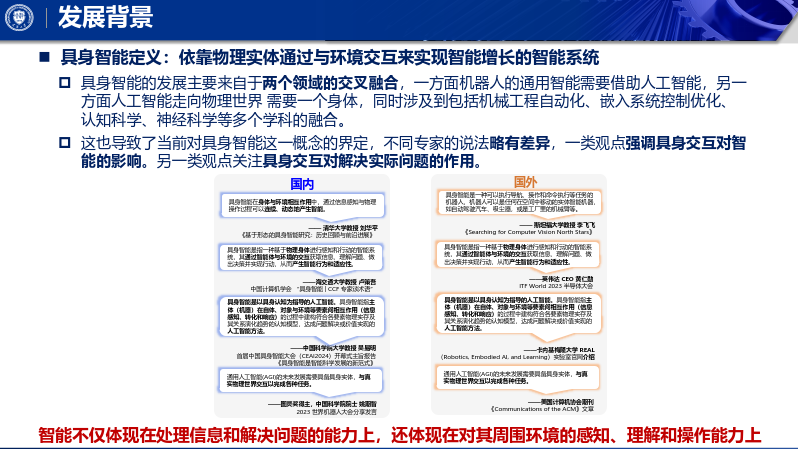
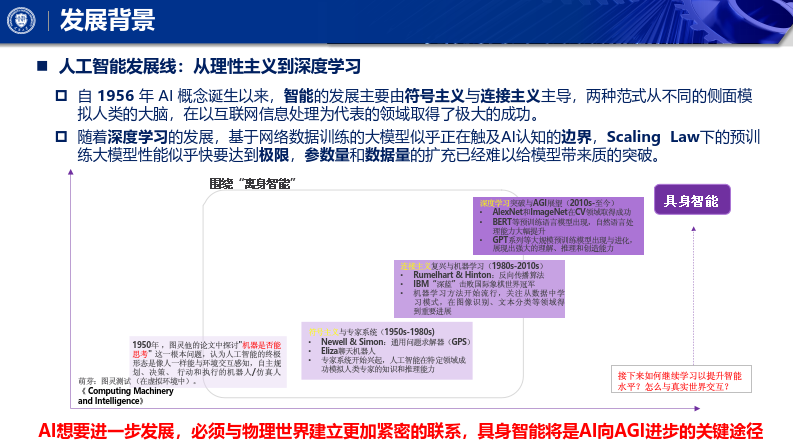
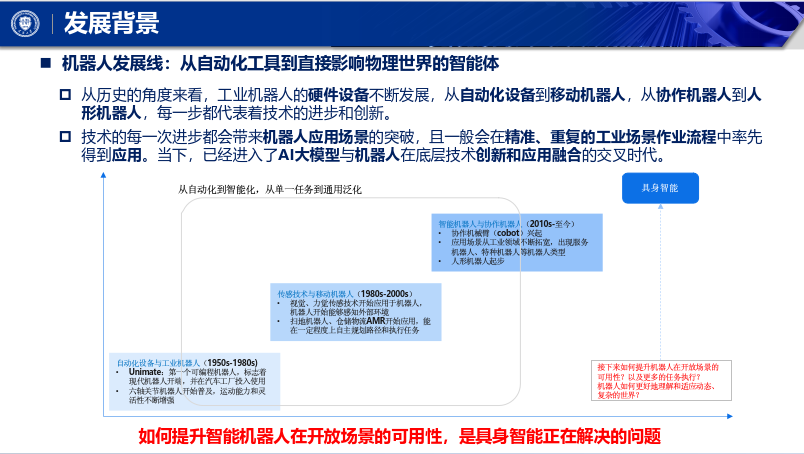
具身智能的发展主要来自于两个领域的交叉融合,一方面机器人的通用智能需要借助人工智能,另一方面人工智能走向物理世界 需要一个身体,同时涉及到包括机械工程自动化、嵌入系统控制优化、认知科学、神经科学等多个学科的融合。
这也导致了当前对具身智能这一概念的界定,不同专家的说法略有差异,一类观点强调具身交互对智能的影响。另一类观点关注具身交互对解决实际问题的作用。


参考信息来源:
1.中国信息通信研究院和北京人形机器人创新中心有限公司——具身智能发展报告
2.北京科技大学教授 林倞——具身智能:迈向人机物高效融合与协作
3.中观村智友——具身智能科技前沿热点