【e^ix图像展示】
1.总览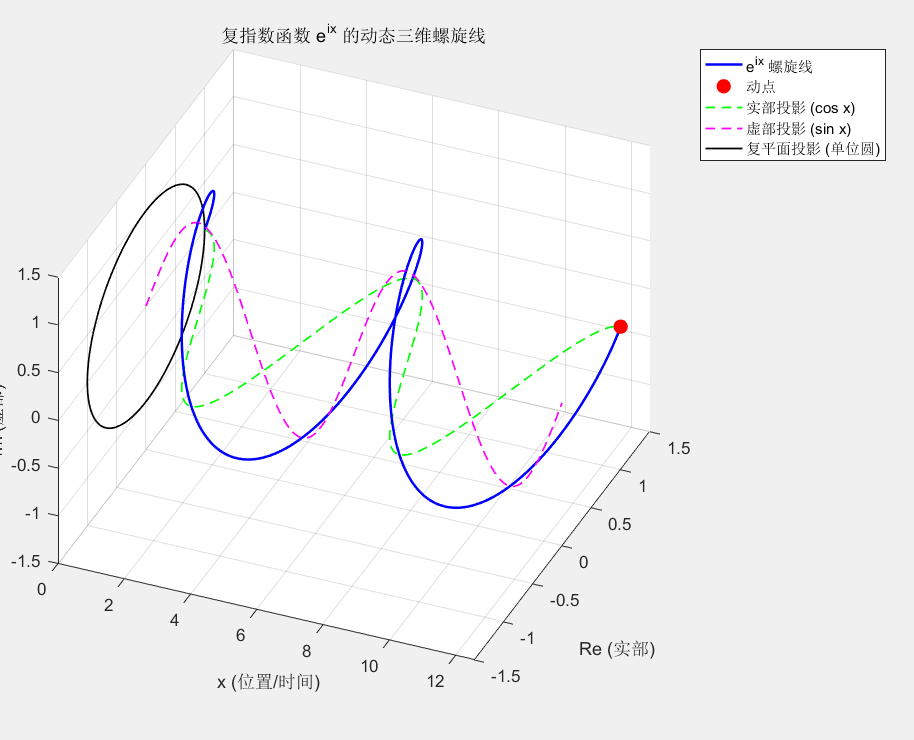
2. 正视x轴
3. 正视实部/虚部
5. matlab代码
% 初始化参数
x = linspace(0, 4*pi, 200); % x范围:0到4π
real_part = cos(x); % 实部:cos(x)
imag_part = sin(x); % 虚部:sin(x)% 创建图形窗口
figure;
set(gcf, 'Position', [100, 100, 800, 600]); % 设置窗口大小
grid on; hold on;% 设置坐标轴标签和标题
xlabel('x (位置/时间)');
ylabel('Re (实部)');
zlabel('Im (虚部)');
title('复指数函数 e^{ix} 的动态三维螺旋线');% 设置视角(俯角和方位角)
view(45, 30); % 初始视角% 初始化图形对象
h_helix = plot3(x(1), real_part(1), imag_part(1), 'b-', 'LineWidth', 1.5); % 螺旋线
h_point = plot3(x(1), real_part(1), imag_part(1), 'ro', 'MarkerSize', 8, 'MarkerFaceColor', 'r'); % 动点
h_real = plot3(x(1), real_part(1), zeros(size(x(1))), 'g--', 'LineWidth', 1); % 实部投影(Re-x平面)
h_imag = plot3(x(1), zeros(size(x(1))), imag_part(1), 'm--', 'LineWidth', 1); % 虚部投影(Im-x平面)
h_circle = plot3(zeros(size(x(1))), real_part(1), imag_part(1), 'k-', 'LineWidth', 1); % 复平面投影(单位圆)% 设置坐标轴范围
axis([0 4*pi -1.5 1.5 -1.5 1.5]);% 动态绘制
for k = 1:length(x)% 更新螺旋线set(h_helix, 'XData', x(1:k), 'YData', real_part(1:k), 'ZData', imag_part(1:k));% 更新动点set(h_point, 'XData', x(k), 'YData', real_part(k), 'ZData', imag_part(k));% 更新实部投影(Re-x平面)set(h_real, 'XData', x(1:k), 'YData', real_part(1:k), 'ZData', zeros(1,k));% 更新虚部投影(Im-x平面)set(h_imag, 'XData', x(1:k), 'YData', zeros(1,k), 'ZData', imag_part(1:k));% 更新复平面投影(单位圆)set(h_circle, 'XData', zeros(1,k), 'YData', real_part(1:k), 'ZData', imag_part(1:k));% 添加图例(仅第一次循环)if k == 1legend('e^{ix} 螺旋线', '动点', '实部投影 (cos x)', '虚部投影 (sin x)', '复平面投影 (单位圆)');enddrawnow; % 实时更新图形pause(0.02); % 控制动画速度
end