Camera Sensor接口协议全解析(四)LVDS与SubLVDS接口及协议深度解析
Camera Sensor LVDS与SubLVDS接口及协议深度解析
一、物理层核心技术
1. LVDS(低压差分信号)

电气特性 :
- 差分电压 :350mV恒定摆幅(最小247mV,最大454mV)
- 共模电压 :1.2V ±0.1V
- 终端匹配 :100Ω电阻(精度±1%)
- 电流驱动 :3.5mA恒流源
- 传输模型 :
math
V_{diff} = (V_{D+}) - (V_{D-}) = 350mV_{pp}
拓扑结构 :
- 点对点直连(1:1)
- 最大传输距离:10米(CAT6A电缆)
- 支持通道数:4-28对差分线
2. SubLVDS(亚低压差分信号)

进化亮点 :
- 电压摆幅降低43%:350mV → 200mV
- 功耗降低40%:0.4mW/通道(计算公式:P = V²/R)
- 共模电压兼容现代低功耗芯片
二、协议层架构解析
1. 数据帧结构

典型时序参数 (以720p@60fps为例):
| 参数 | 值 | 说明 |
|---|---|---|
| 帧周期 | 16.7ms | 1/60秒 |
| 行周期 | 29.6μs | 包含消隐区 |
| 像素时钟 | 74.25MHz | 1280×720×60 |
| VSYNC脉宽 | 5行时间 | 帧同步信号 |
| HSYNC脉宽 | 128像素时间 | 行同步信号 |
2. 同步机制

同步模式对比 :
| 模式 | 信号线 | 优点 | 缺点 |
|---|---|---|---|
| 独立同步 | VSYNC+HSYNC | 简单直观 | 增加2根信号线 |
| 嵌入式同步 | 数据通道(SAV/EAV)) | 减少布线 | 需要编解码器 |
| 混合模式 | VSYNC+数据嵌入 | 平衡方案 | 设计复杂 |
三、工业应用场景分析
1. 机器视觉系统(Basler ace方案)

关键参数 :
- 分辨率:2448×2048
- 帧率:30fps
- 位深:12-bit
- 带宽计算:2448×2048×12×30 ≈ 1.8Gbps
- 接口:8对LVDS通道
2. 汽车环视系统
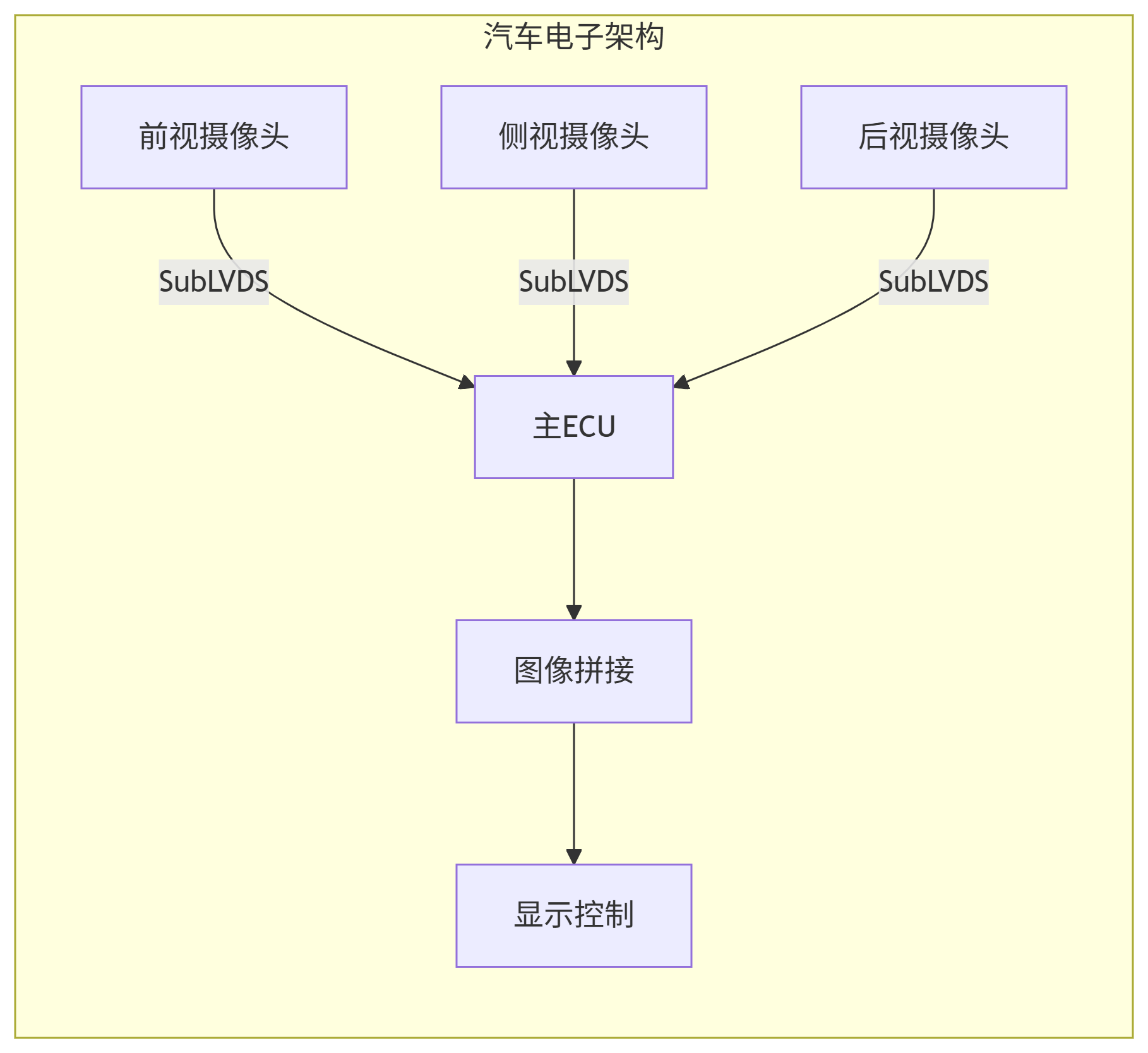
设计优势 :
- 4路720P@30fps总功耗<2W
- -40℃~105℃宽温域工作
- 抗电磁干扰能力:30dB CMNR
- 传输距离:15米无中继
四、驱动开发与FPGA实现
1. Linux V4L2驱动框架
c
// LVDS接收器初始化
struct v4l2_subdev *sd;
v4l2_subdev_init(sd, &lvds_ops);// 设置格式
struct v4l2_mbus_framefmt fmt = {.width = 1280,.height = 720,.code = MEDIA_BUS_FMT_SGRBG12_1X12,
};
v4l2_subdev_call(sd, pad, set_fmt, NULL, &fmt);// 启动流传输
struct v4l2_subdev_video_ops *video = sd->ops->video;
video->s_stream(sd, 1);
2. FPGA采集逻辑(Verilog)
verilog
module lvds_receiver(input [3:0] lvds_p, // LVDS+ input [3:0] lvds_n, // LVDS-input clk_ref, // 200MHz参考时钟output [11:0] pixel // 12-bit像素输出
);genvar i;
generate
for (i=0; i<4; i=i+1) beginIBUFDS #(.DIFF_TERM("TRUE")) ibuf (.I(lvds_p[i]),.IB(lvds_n[i]),.O(lvds_data[i]));IDDR #(.DDR_CLK_EDGE("SAME_EDGE")) iddr (.Q1(data_even[i]),.Q2(data_odd[i]),.C(clk_ref),.CE(1'b1),.D(lvds_data[i]),.R(1'b0),.S(1'b0));
end
endgenerateassign pixel = {data_even, data_odd}; // 合并双沿数据
endmodule
五、与MIPI CSI-2的对比分析
| 维度 | LVDS/SubLVDS | MIPI CSI-2 | 优势场景 |
|---|---|---|---|
| 协议开销 | 0% | 10-15% | 实时控制 |
| 传输延迟 | <10ns | 50-100ns | 工业自动化 |
| 开发难度 | FPGA直采 | 需PHY芯片 | 快速原型 |
| 成本 | $0.5/通道 | $1.2/Lane | 成本敏感型 |
| 传输距离 | 15米 | 0.3米 | 分布式系统 |
| 抗干扰性 | 30dB CMNR | 25dB CMNR | 工业环境 |
六、未来发展趋势
1. 技术演进路线

2. 替代技术分析
- SLVS-EC :索尼专有协议,速率达6Gbps
- A-PHY :开放标准,支持15米@16Gbps
- HDBaseT :基于以太网的替代方案
LVDS与SubLVDS作为工业视觉和汽车电子的骨干技术,凭借其卓越的抗干扰能力和传输可靠性,在严苛环境应用中持续发挥不可替代的作用。随着A-PHY等新技术的崛起,掌握多协议兼容设计能力将成为工程师的核心竞争力。