P2C (Point-to-Curve) 算法深度解析
P2C (Point-to-Curve) 算法深度解析
一、定义与历史背景
1.1 基本定义
P2C(Point-to-Curve)算法是一类将离散点集转换为连续参数化曲线的计算方法,属于计算几何和计算机图形学的交叉领域技术。其数学本质是解决散点数据的连续化重建问题。
1.2 发展历史
- 理论基础:可追溯至1946年Isaac Schoenberg提出的样条函数理论
- 算法雏形:1962年Pierre Bézier在雷诺汽车公司开发贝塞尔曲线系统
- 里程碑发展:
- 1972年de Boor提出B样条标准算法
- 1980年代Les Piegl等人建立NURBS理论体系
- 现代演进:21世纪后出现基于机器学习的新型拟合方法
二、核心实现原理
2.1 数学基础
采用参数化曲线表示:C(u) = Σ[N_i,k(u)·P_i] (u∈[0,1])
其中:
N_i,k:k阶基函数P_i:控制点u:参数变量
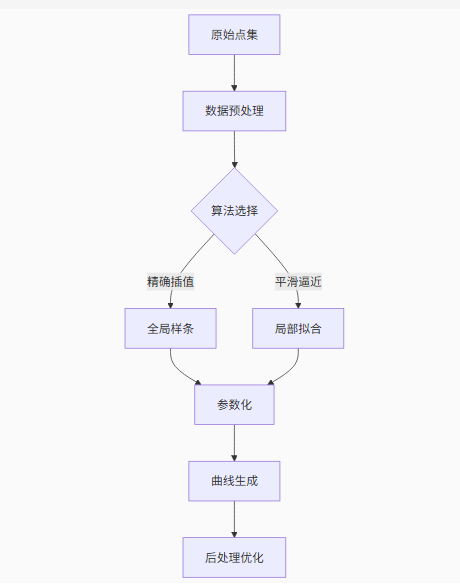
2.2 主流实现方法
方法1:最小二乘逼近
def least_square_fit(points, degree):# 构建范德蒙矩阵V = np.vander(points[:,0], degree+1)# 求解线性方程组coeff = np.linalg.lstsq(V, points[:,1], rcond=None)[0]return np.polynomial.Polynomial(coeff[::-1])方法2:B样条拟合
参数化:采用弦长参数化法确定节点向量
计算基函数:使用Cox-de Boor递归公式
解线性系统:构建并求解控制点方程
2.3 关键技术挑战
| 挑战类型 | 解决方案 |
|---|---|
| 过拟合 | 引入正则化项/Tikhonov正则化 |
| 局部畸变 | 采用分段拟合策略 |
| 计算效率 | R*-tree空间索引加速 |
四、应用领域
4.1 工业设计
-
汽车外形建模(贝塞尔曲线)
-
飞机翼型设计(NURBS)
-
船舶流体线型优化
4.2 计算机视觉
-
手写识别笔画重建
-
运动目标轨迹预测
-
医学图像轮廓提取(CT/MRI)
4.3 地理信息系统
-
等高线生成
-
河流航道数字化
-
地震断层线拟合
五、前沿进展
-
深度学习方法:PointNet++等网络实现端到端拟合
-
实时优化:GPU加速的CUDA实现(速度提升50-100x)
-
自适应算法:基于误差反馈的动态精度控制
六、性能对比
| 算法类型 | 时间复杂度 | 优点 | 缺点 |
|---|---|---|---|
| 多项式拟合 | O(n³) | 实现简单 | 龙格现象 |
| B样条 | O(n·k²) | 局部控制 | 需要参数化 |
| RBF插值 | O(n³) | 高维适用 | 计算量大 |
| 注:n为点数,k为曲线阶数
七、开源实现
- ALGLIB:支持多种拟合方法的数值计算库
- Eigen:提供矩阵运算基础组件
- OpenCV:cv::fitLine等现成函数
八、未来方向
- 量子计算加速
- 非均匀采样点处理
- 多模态曲线融合