【DTOF传感器】DTOF系统介绍
文章目录
- 3D成像方法
- DTOF和ITOF
3D成像方法
3D成像方法分为主动式和被动式,主动式需要通过激光器主动发送一定宽度脉冲和一定频率的光信号,打到物体表面后,物体反射回来的光子被传感器接收。具体分类如下框图,其中飞行时间法分为间接飞行时间法(ITOF)和直接飞行时间法(DTOF)。
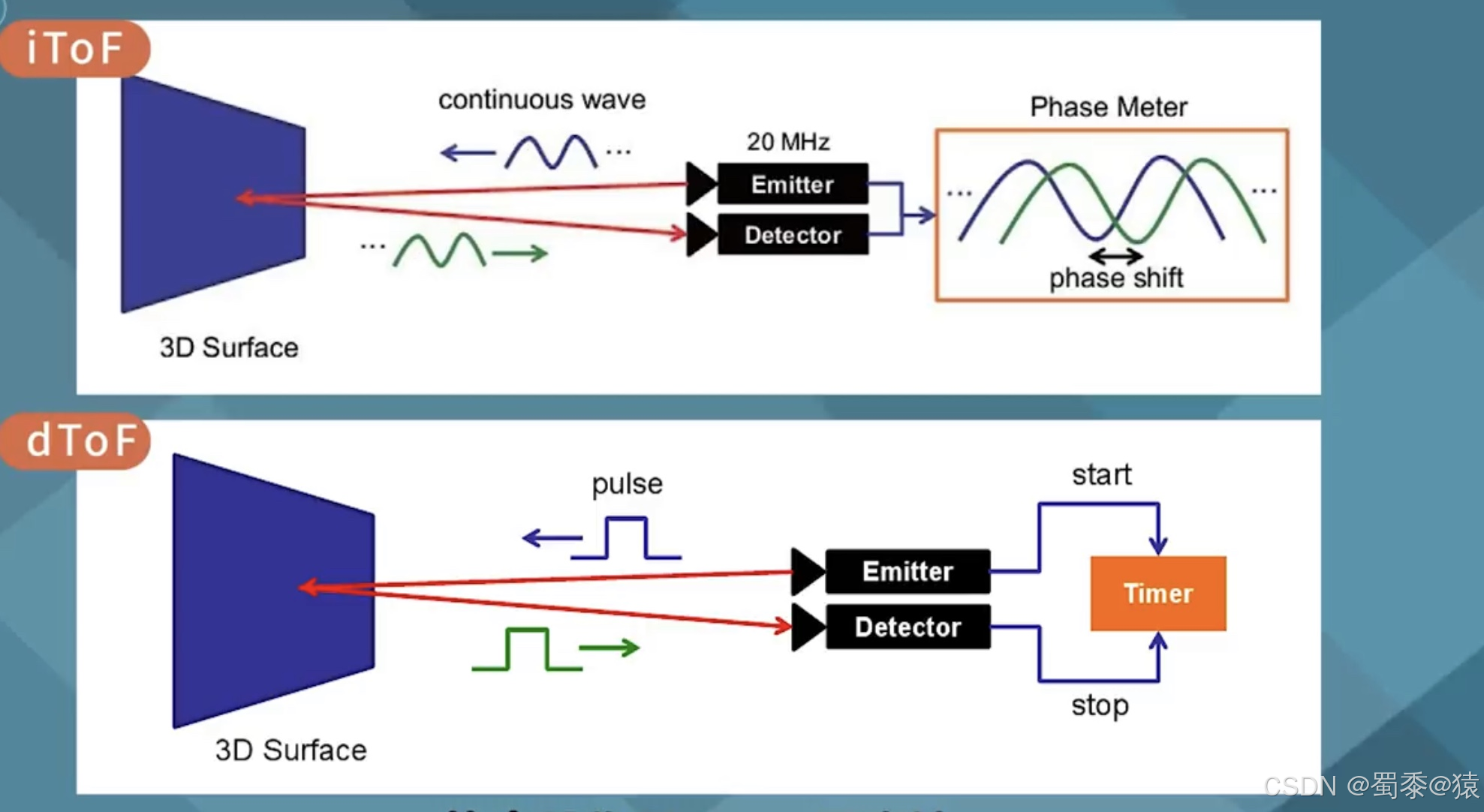
DTOF和ITOF
DTOF激光器主动发送一定宽度脉冲和一定频率的光信号,经物体表面反射回来之后,进行起始时间和终止时间的时间差的直接测量。DTOF的感光器件分为APD和SPAD(单光子雪崩二极管,工作在,增益大,灵敏度高),测量距离几米到几百米。
ITOF是通过相位偏移的方法间接计算时间。测量距离近,精度优于DTOF。