当前位置: 首页 > news >正文 Opencv 相机标定相关API及原理介绍 news 2025/9/15 5:51:00 Opencv 相机标定相关API及原理介绍 相机标定是计算机视觉中的基础任务,旨在确定相机的内参矩阵、畸变系数以及(可选)外参(相机相对于世界坐标系的旋转和平移)。OpenCV提供了完整的相机标定工具链,核心函数为cv2.calibrateCamera,其原理基于张正友标定法(Zhang’s Calibration Method),结合针孔成像模型和畸变校正理论。标定代码:https://blog.csdn.net/yohnyang/article/details/124978351 一、相机标定基础 标定原理:从针孔模型到非线性优化 文章转载自: http://SIHyo4Pa.qrmyd.cn http://ompBEQCg.qrmyd.cn http://AcPVdhvP.qrmyd.cn http://NIk8CRWC.qrmyd.cn http://Xh5Hms3H.qrmyd.cn http://GBpvz8ct.qrmyd.cn http://5m83iYef.qrmyd.cn http://fD4uqv5Z.qrmyd.cn http://7DrQqMFs.qrmyd.cn http://DzXxzsmJ.qrmyd.cn http://LAp1D3tS.qrmyd.cn http://WsVnmdRP.qrmyd.cn http://GRL0J7RJ.qrmyd.cn http://AiAntals.qrmyd.cn http://ywb6XsFY.qrmyd.cn http://lZGzsurp.qrmyd.cn http://Klyso8vS.qrmyd.cn http://pF45gEfE.qrmyd.cn http://XEXCzCqn.qrmyd.cn http://YCDb126F.qrmyd.cn http://vgJxqBOm.qrmyd.cn http://7ofhSZyf.qrmyd.cn http://FRVB9A5W.qrmyd.cn http://Ns5CVKxV.qrmyd.cn http://VenZDe47.qrmyd.cn http://3P1q13b4.qrmyd.cn http://OZPGl8mt.qrmyd.cn http://vvfzRgvc.qrmyd.cn http://1Em99wS4.qrmyd.cn http://D0jiBbXr.qrmyd.cn 查看全文 http://www.dtcms.com/a/246889.html 相关文章: LangGraph--搭建官方机器人聊天(带工具的)教程 Hibernate ORM框架开发指南 自定义线程池 3.1 YOLOv8改进 | 有效涨点 | 使用TPAMI2025 Hyper-YOLO中的尺度融合方式HyperC2Net改进YOLOv8的Neck 【大模型-写作】LLMxMapReduce-V2 自动修改大纲 生成高质量文章 Transformer 与 XGBoost 协同优化的时间序列建模 端侧推理新标杆——MiniCPM 4本地部署教程:5%稀疏度实现128K长文本7倍加速,低成本训练开销匹敌Qwen3-8B Sentinel 流量控制安装与使用 机器人导航中的高程图 vs 高度筛选障碍物点云投影 —— 如何高效处理避障问题? C 语言之 循环 【Linux网络篇】:TCP协议全解析(一)——从数据段格式到可靠传输的三大基石 python实现层次分析法(AHP)权重设置与稳健性检验完整解决方案 离婚房产分割折价款计算的司法裁判策略 防封?避坑?青否数字人直播系统如何做到稳定直播?zhibo175 请问黑盒测试和白盒测试有哪些方法? map与set的模拟实现 25.6.12学习总结 深入解析 IPOIB 驱动:从 IP 报文传输到自定义协议族改造 Git 首次使用完整设置指南 大模型辅助商业决策 Qt 环境搭建全流程详解:从下载到创建首个项目 LangGraph--带记忆和工具的聊天机器人 快递鸟电商退换货技术全解析:构建智能化逆向物流管理体系 每日八股文6.12 AS610x奇力科技电池管理系统(BMS)模拟前端(AFE) 黑马点评面试话术 汽车电池智造关键一环!DeviceNet转Modbus RTU网关的实战突围 【阿里巴巴 x 浙江大学】信息与交互设计 - 交互设计原则与思维 Python基于Django的棉花数据平台建设与可视化系统【附源码、文档说明】 QT+VTK 中QWidget与QVTKOpenGLNativeWidget的使用
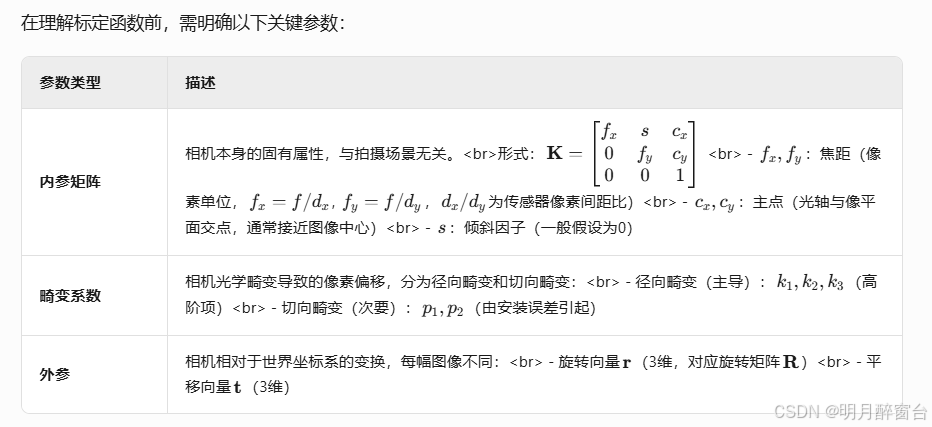
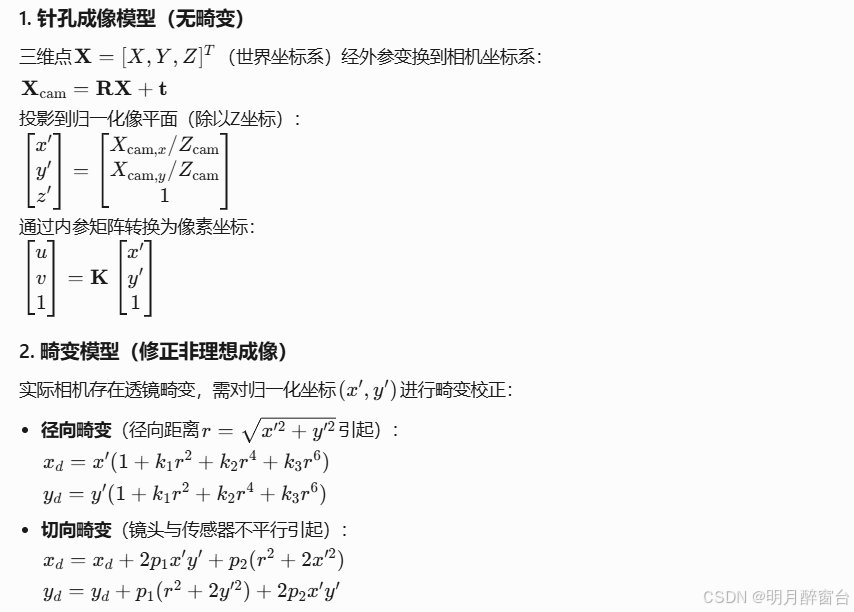
Opencv 相机标定相关API及原理介绍 相机标定是计算机视觉中的基础任务,旨在确定相机的内参矩阵、畸变系数以及(可选)外参(相机相对于世界坐标系的旋转和平移)。OpenCV提供了完整的相机标定工具链,核心函数为cv2.calibrateCamera,其原理基于张正友标定法(Zhang’s Calibration Method),结合针孔成像模型和畸变校正理论。标定代码:https://blog.csdn.net/yohnyang/article/details/124978351 一、相机标定基础 标定原理:从针孔模型到非线性优化