如何确定某个路由器的路由表?(计算机网络)
以下题为例
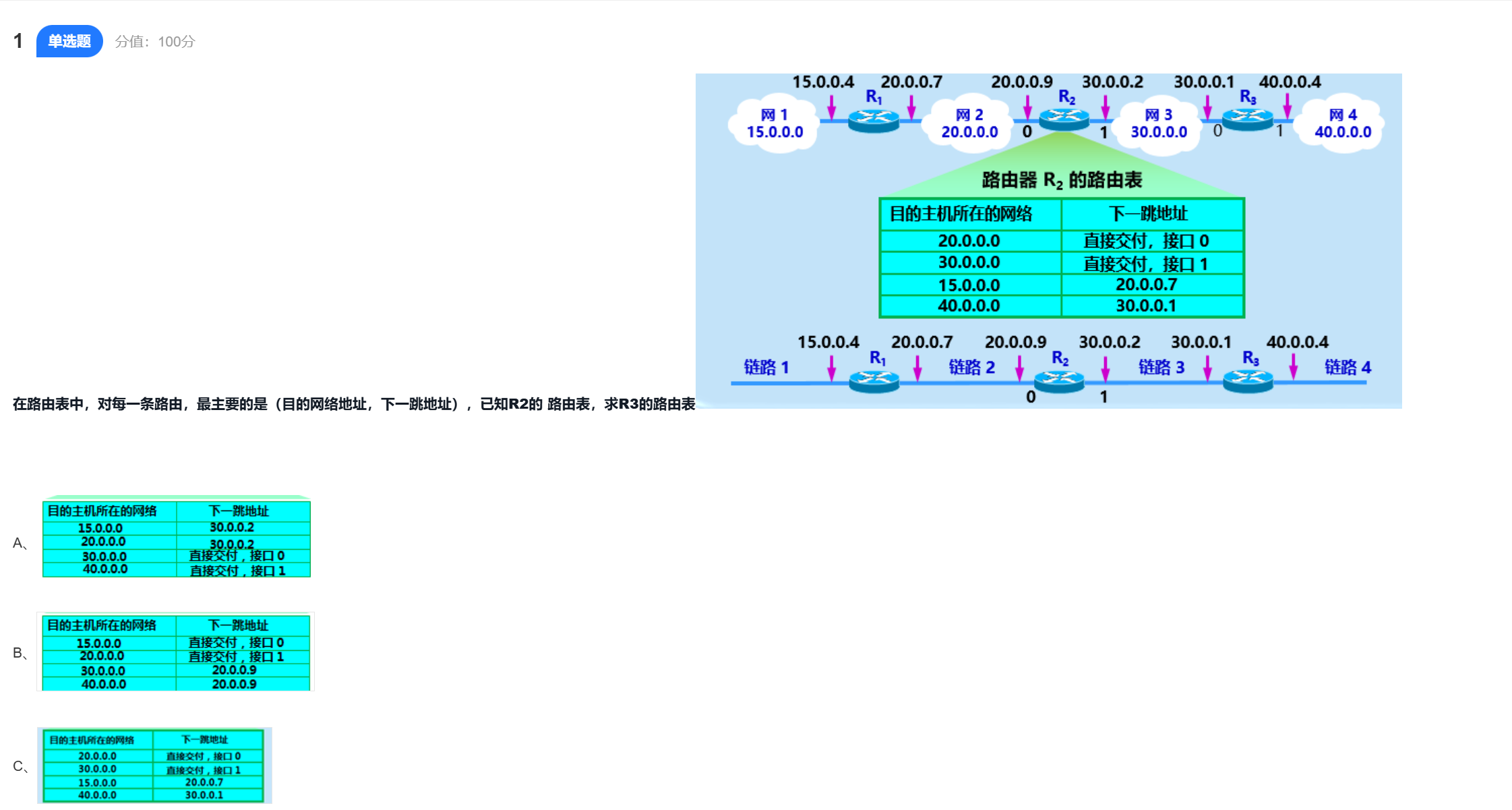
题目说要路由表关键是目的网络地址和下一跳地址
那么我们第一步先确定目的网络地址。
一共有四个网络,即有四个目的网络地址:15.0.0.0 20.0.0.0 30.0.0.0 40.0.0.0
下一跳地址就是去往目地网络的下一个ip地址 。
我们这里是要的R3的路由表
R3旁边的两个目的网络地址是30.0.0.0(端口0直接相连即可以直接交付) 和40.0.0.0(端口1直接相连即可以直接交付)
当他要给15.0.0.0和20.0.0.0网络下的主机发消息时都需先经过R2才可以完成,即R3的端口0交给R2的端口1,R2端口1的ip地址时30.0.0.2 ,所以下一跳地址就是这个30.0.0.2。