softgym安装
softgym安装
- 实现softgym安装实现可变形物体仿真(一)
- 1. 安装pybind11
- 2.conda 路径要正确
- 3.编译后要退出docker环境进行运行
实现softgym安装实现可变形物体仿真(一)
为实现可变形物体的仿真,因此需要使用物理引擎进行仿真,可以使用的物理引擎包括了,MuJoCo, Bullet, Flex, and SOFA等物理引擎,这里我们使用基于flex的softgym进行仿真,这四中仿真引擎的对比详细信息可以查看论文《Benchmarking the Sim-to-Real Gap in Cloth Manipulation》。这里的安装方法使用链接: dmfd实现,其提供了完整的安装步骤,以下提供几个可能的坑。
1. 安装pybind11
在docker外的conda环境中安装pybind11。
Install Pybind11 using conda install pybind11
2.conda 路径要正确
运行docker时需要mount docker外的conda环境,这时挂载路径和目标路径要保持一致!下面提供了一个样例。如果不使用相同的路径可能会出现,conda找不到的问题,或者编译时pybind11找不到。
sudo docker run \
-v /home/libo/project/simulator/dmfd-main/softgym:/home/softgym \
-v /home/libo/miniconda3/:/home/software/miniconda3/ \
-v /tmp/.X11-unix:/tmp/.X11-unix \
--gpus all \
-e DISPLAY=$DISPLAY \
-e QT_X11_NO_MITSHM=1 \
-it docker.1ms.run/xingyu/softgym bash
3.编译后要退出docker环境进行运行
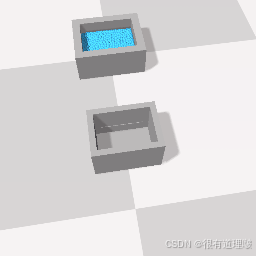
使用docker的安装方法就是采用docker的环境莱编译包,因此退出docker后flex已经被编译到了docker外部的环境softgym中。因此要退出docker,这一点也在官方给的教程中提及。运行示例时在softgym的问件夹中运行!踩了这些坑之后就可以运行成功了。